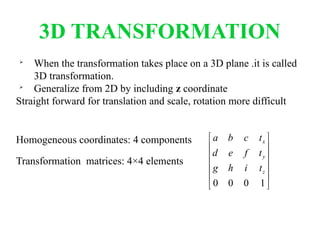
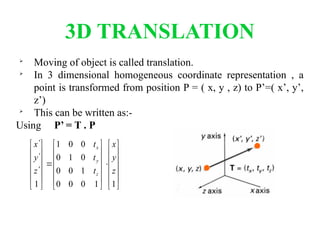
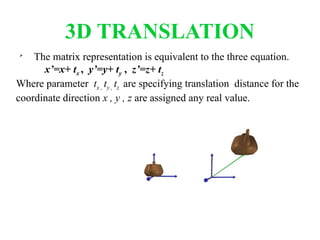
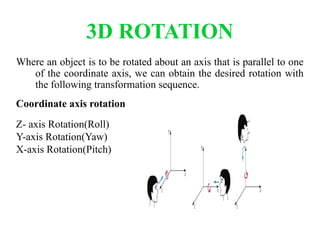
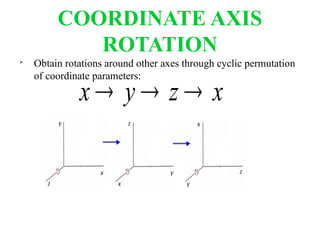
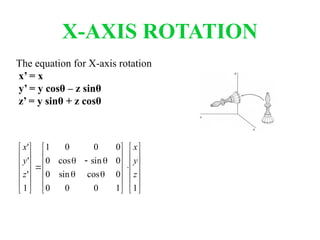
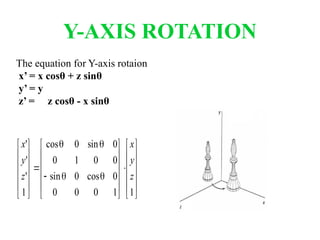
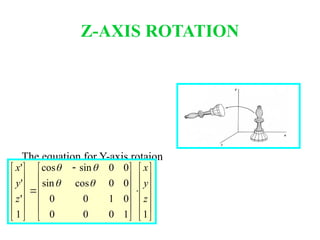
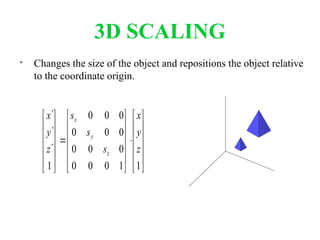
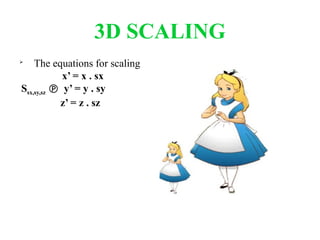
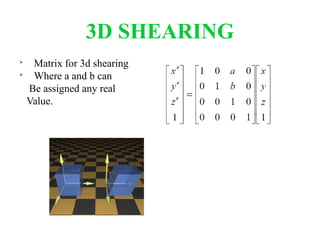
The document outlines the various types of transformations in computer graphics, specifically focusing on 2D and 3D transformations, such as translation, rotation, scaling, shearing, and reflection. It details how these transformations manipulate object positioning, shape, and viewing perspectives through matrix representation. Key mathematical equations and matrix forms for each transformation type are provided, illustrating their applications in graphics rendering.