Downloaded 476 times

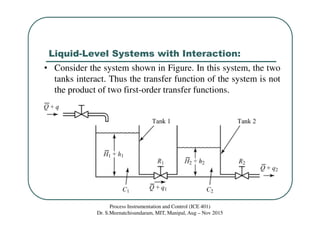
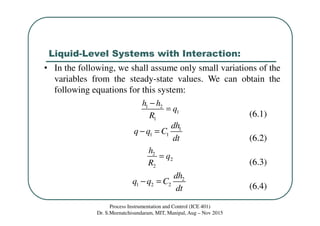
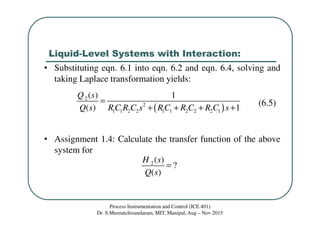
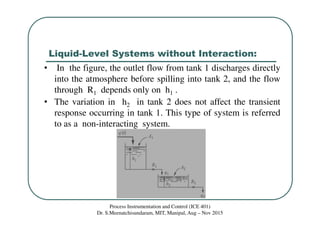
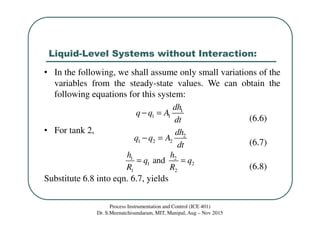
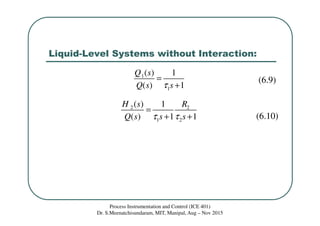
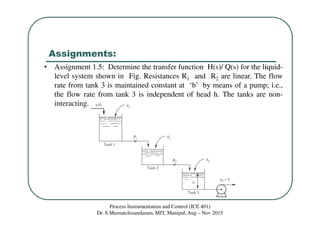

The document discusses mathematical modeling of interacting and non-interacting liquid-level systems in a process instrumentation and control class, outlining equations and transfer functions for each system type. It highlights the differences in transient responses for systems based on interaction between tanks, presenting specific assignments for calculating transfer functions. Relevant references for further reading on modern control engineering and measurement basics are also provided.