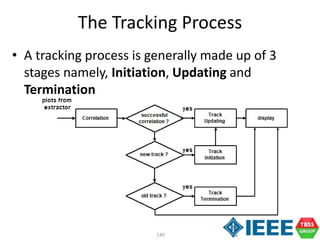
Downloaded 1,345 times

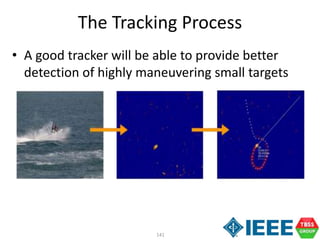
![23
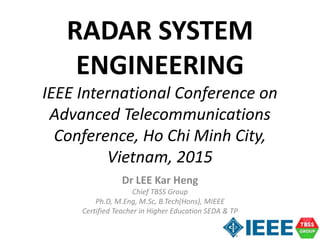
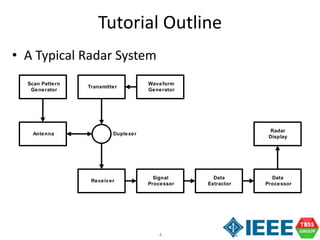
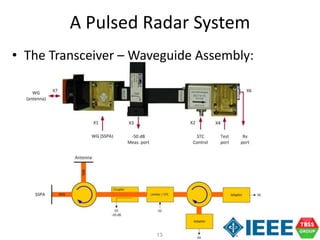
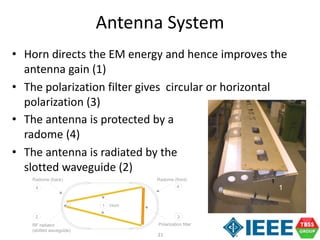
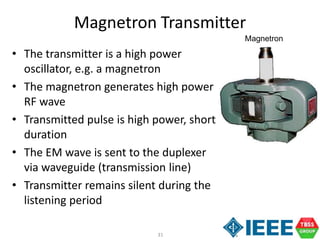
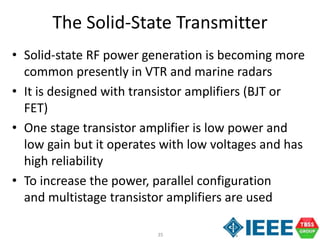
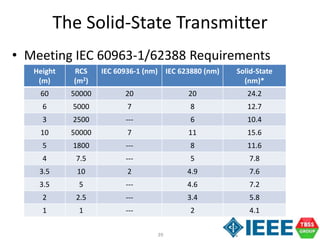
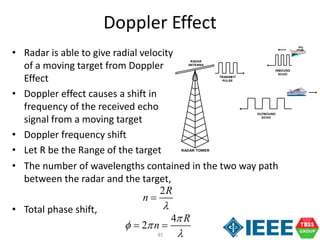
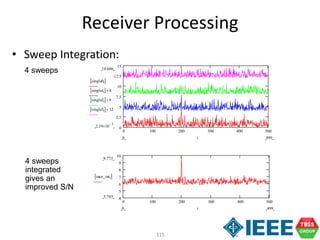
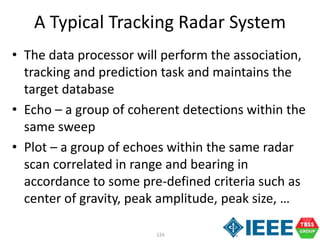
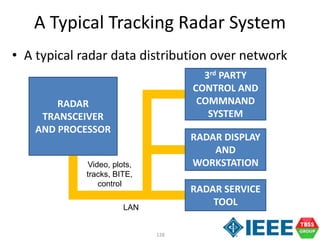
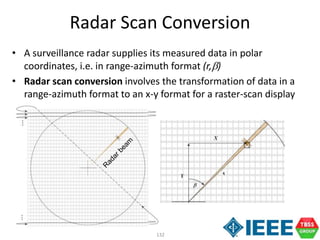
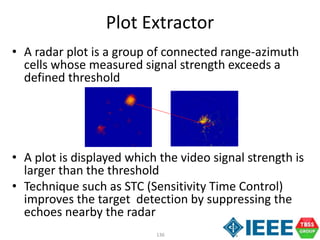
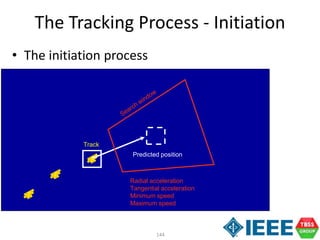
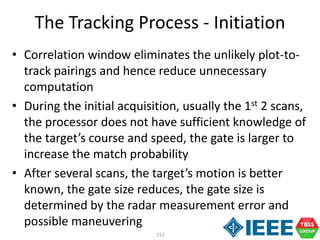
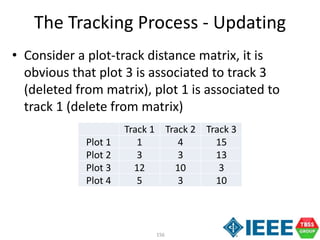
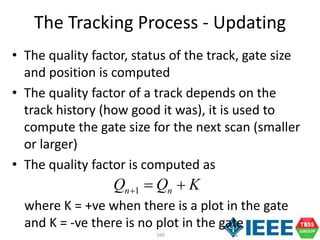
Antenna System
• Antenna performance:
Main Parameters:
Frequency band 9.14 - 9.47 [GHz]
VSWR
9.345 - 9.405 GHz ≤ 1.15
9.140 - 9.470 GHz ≤ 1.20
Gain ≥ 38 [dBi]
Integrated Cancellation Ratio ≥ 15 [dB]
Azimuth Pattern:
Horizontal BW @ -3 dB ≤ 0.35 [º]
Side lobe level
± 1.5º to ± 5º ≤ -28 [º]
± 5º to ± 10º ≤ -30 [º]
Exceeding ± 10º ≤ -35 [º]
Elevation Pattern:
Elevation beam form Fan
Vertical BW @ -3 dB ≤ 11 [º]
Min. coverage @ -30 dB -18 [º]
Tilt (fixed) -1.5 [º]](https://image.slidesharecdn.com/ieeeatcradarsystemengineeringv3-151016034043-lva1-app6891/85/A-Tutorial-on-Radar-System-Engineering-23-320.jpg)

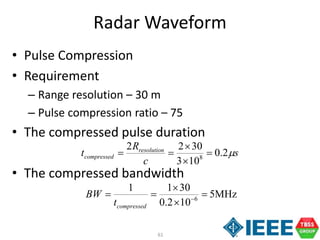
![48
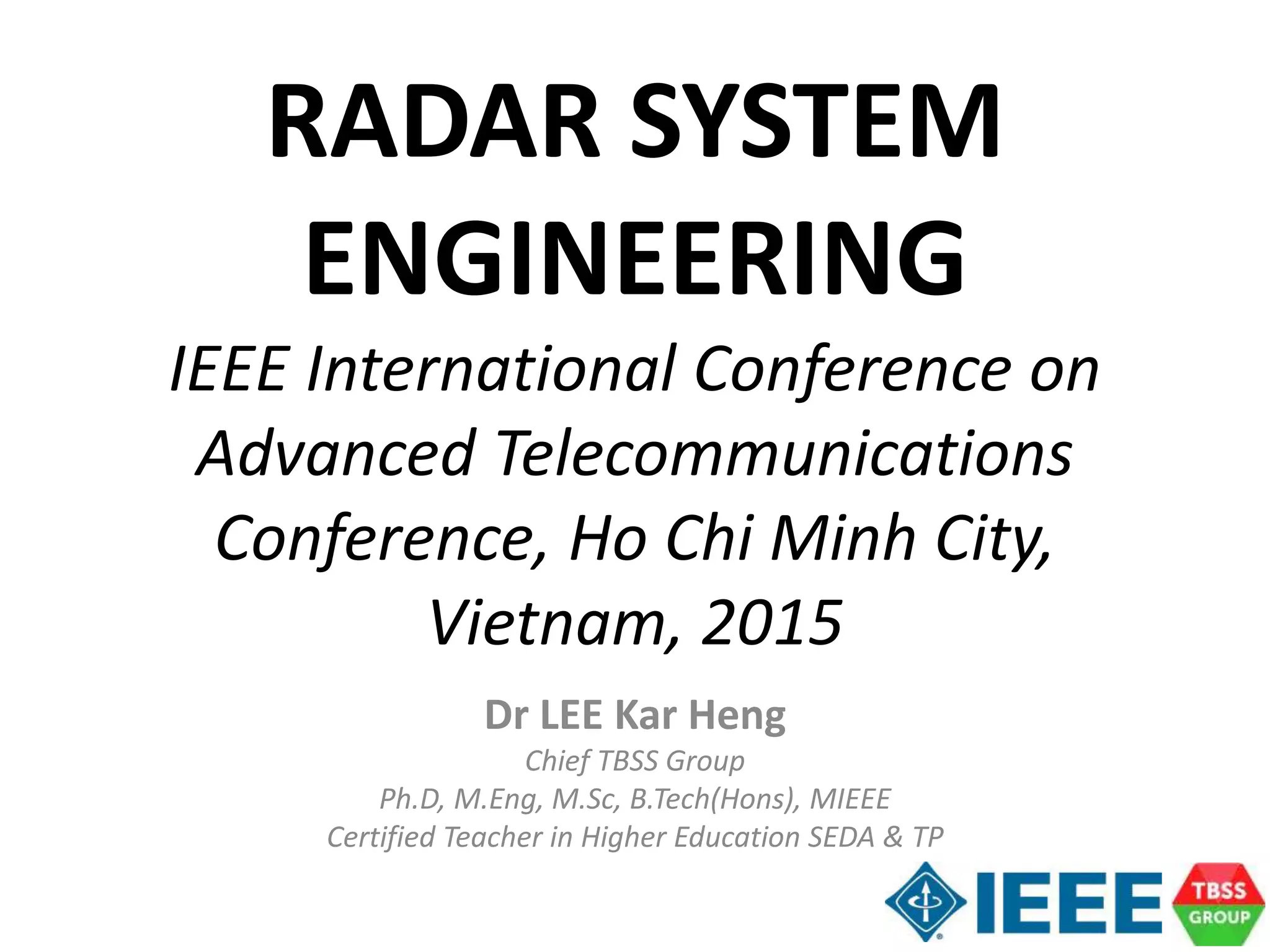
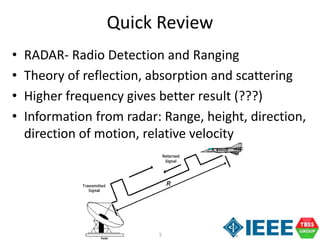
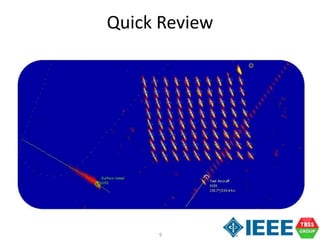
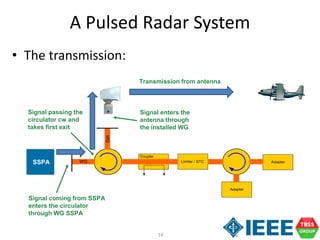
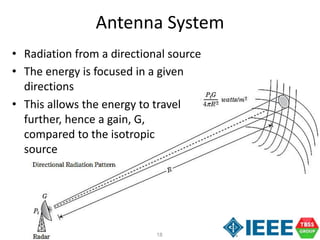
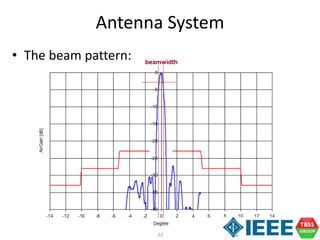
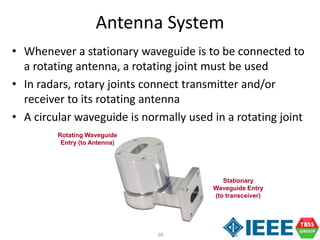
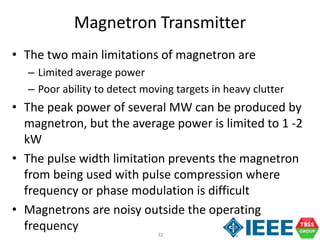
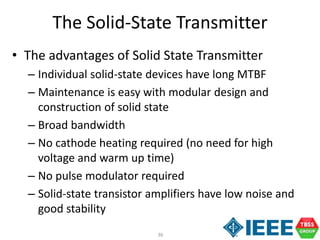
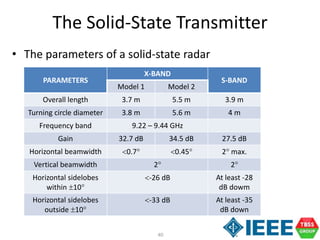
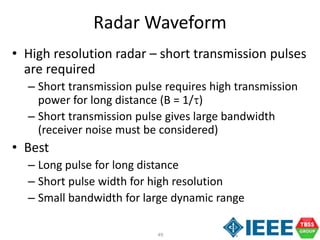
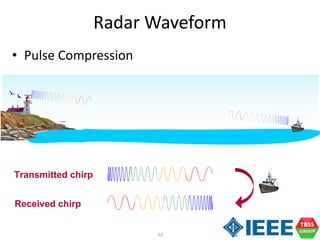
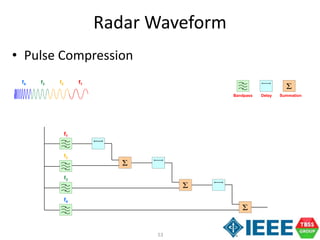
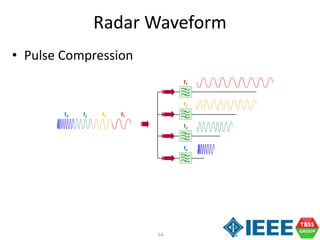
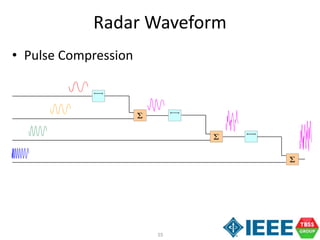
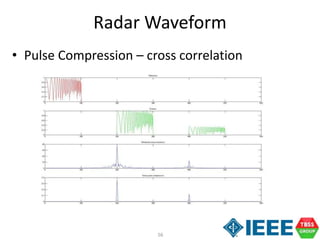
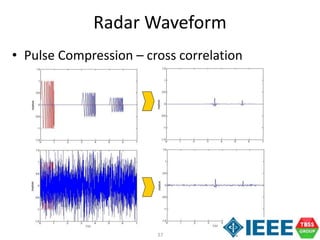
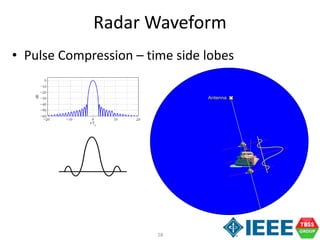
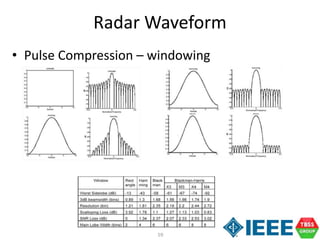
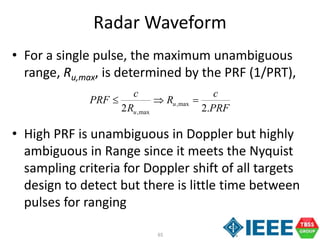
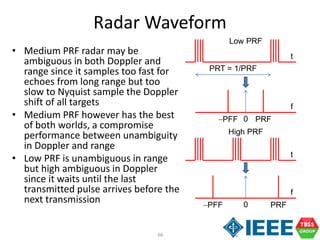
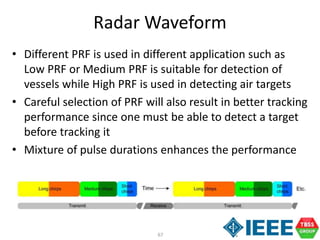
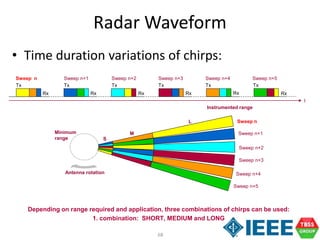
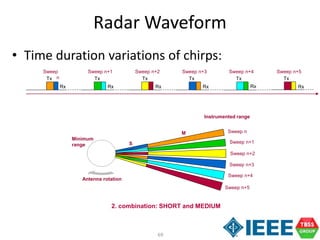
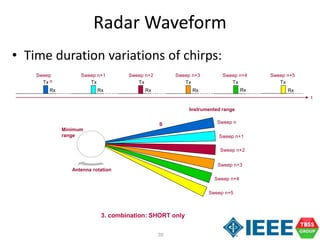
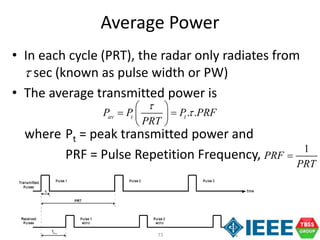
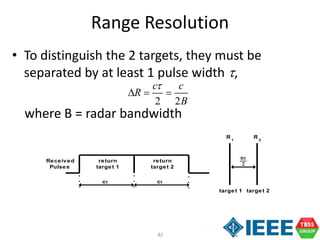
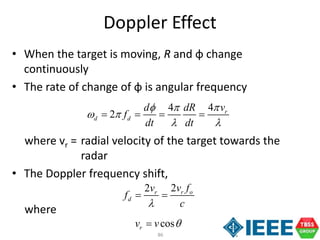
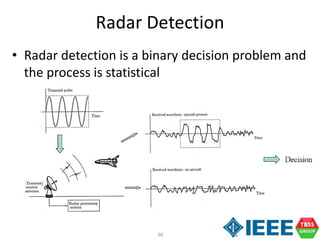
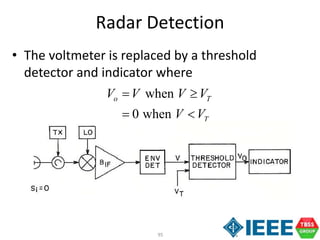
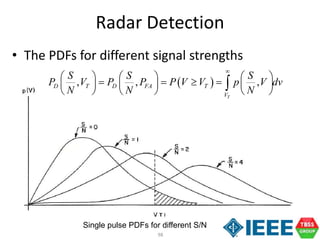
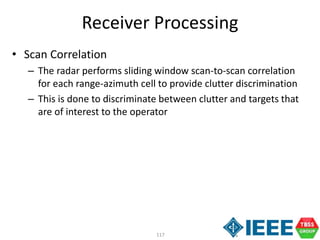
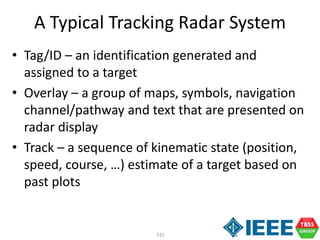
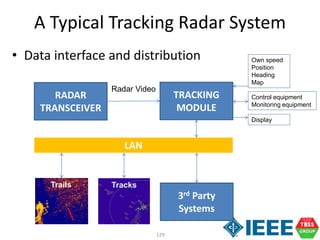
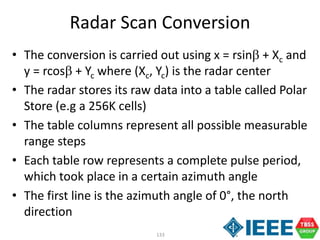
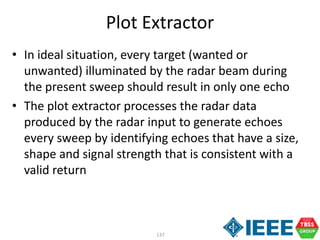
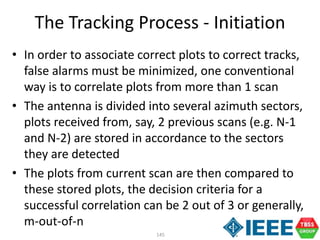
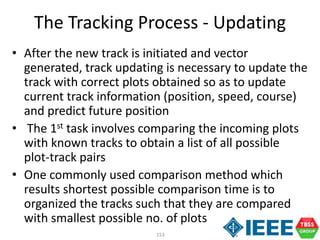
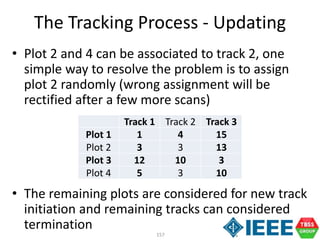
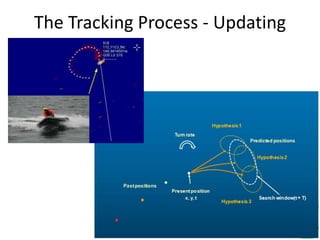
Radar Waveform
• The Chirp Pulse:
Time
Amplitude
Time
Frequency
f [MHz]
1 2 3 4 5 6
Chirp BW Separation
Time
Amplitude
Time
Frequency
or
35 Mhz 6 Mhz
f [MHz]
100 375
f [MHz]
100 375
1300 MHz
7825 MHz
(VTS)
7600 MHz
(SMR)
100 - 375 MHz
1400 - 1675 MHz
9225 - 9500 MHz (VTS)
9000 - 9275 MHz (SMR)
9260 9301 9342 9383 9424 9465
9441.5
9447.5](https://image.slidesharecdn.com/ieeeatcradarsystemengineeringv3-151016034043-lva1-app6891/85/A-Tutorial-on-Radar-System-Engineering-48-320.jpg)
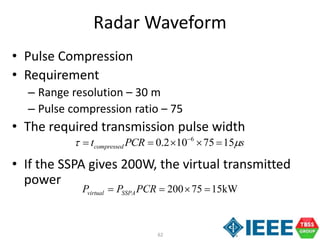
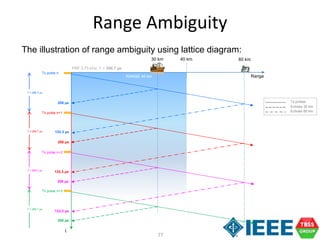
![76
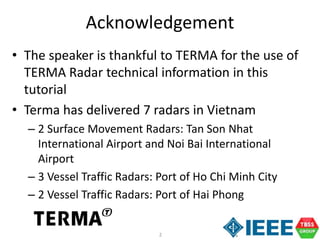
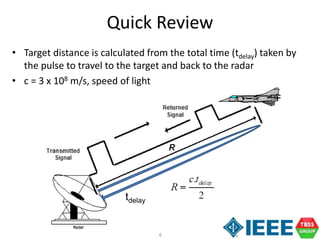
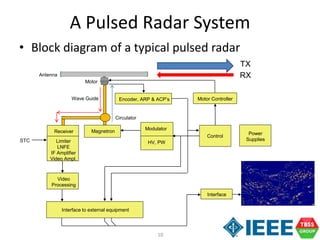
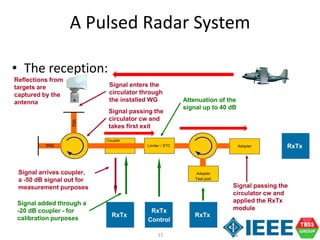
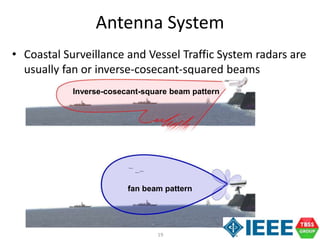
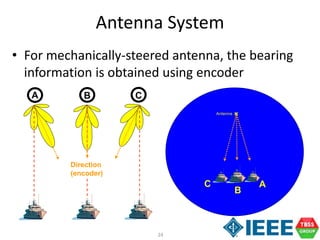
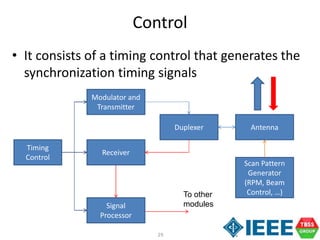
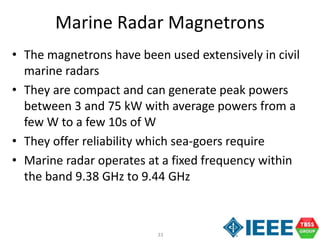
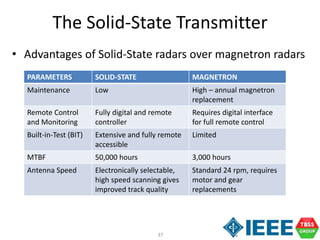
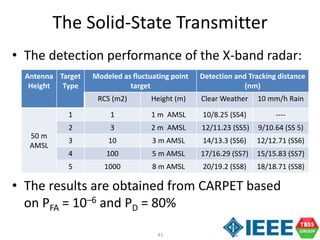
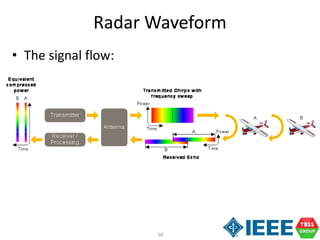
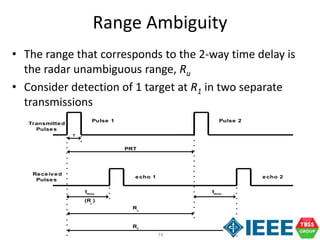
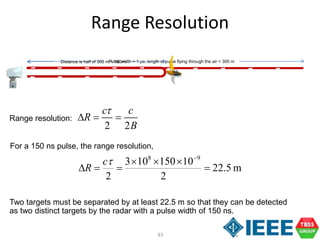
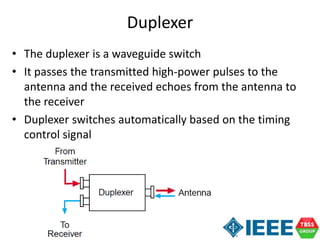
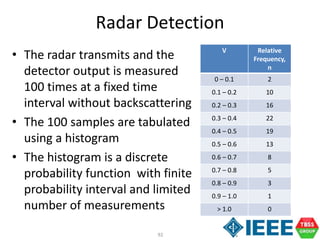
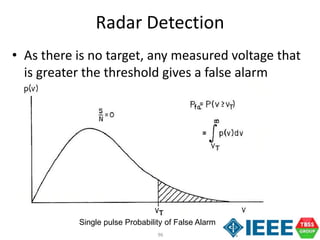
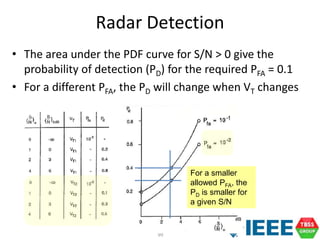
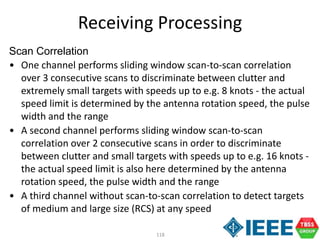
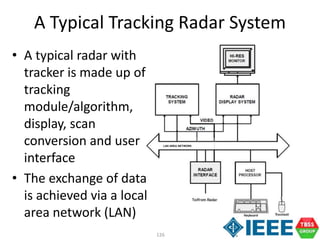
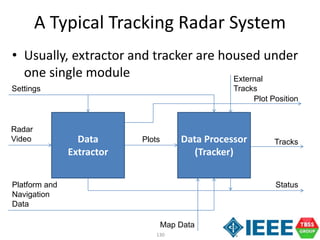
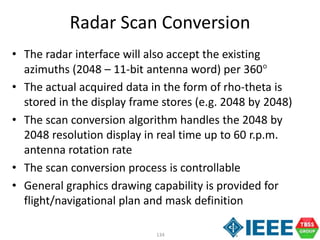
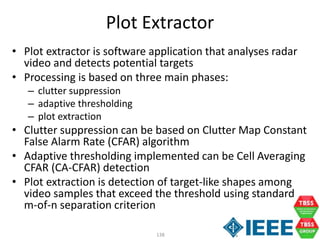
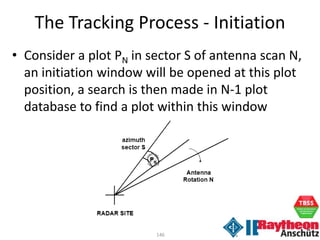
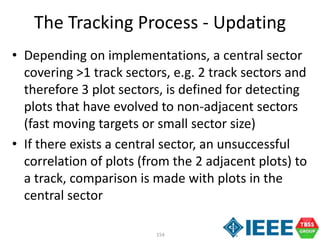
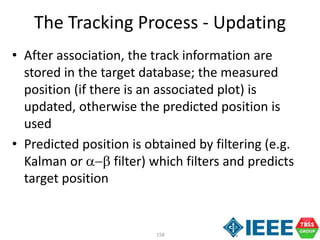
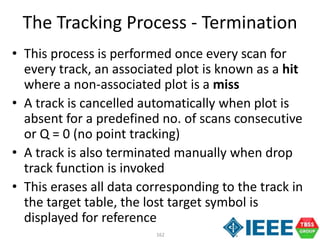
Range Ambiguity
• The maximum unambiguous range: ,max
2 2
u
cPRT c
R
PRF
Page 2 of 4
Range: 5 NM
Transmit
Pulse 1
t = 0 Next pulse
Time needed for the pulse to hit the target: T = 31 µs
Time needed for the pulse to return to the antenna: T = 31 µs
Time needed between two pulses: T > 62 µs or PRF < 16.1 kHz (corresponding 2 x range, here 10 NM)
Target at 5 NM
t = 31 µs
Receive
Pulse 1
t = 62 µs
PRF [Hz]
1000
1500
2200
4000
8000
[km]
150
100
68.2
37.5
18.7
Max. range [NM]
81
54
36.8
20.2
10.1
300.000 km/s
300.000 km/s
Max. range =
c
2PRF
150.000
PRF
81.000
PRF
km NM
76](https://image.slidesharecdn.com/ieeeatcradarsystemengineeringv3-151016034043-lva1-app6891/85/A-Tutorial-on-Radar-System-Engineering-76-320.jpg)

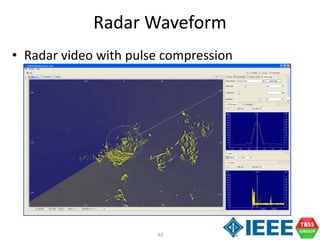
![107
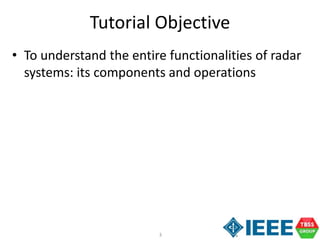
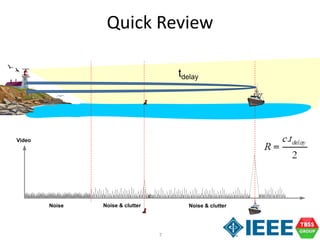
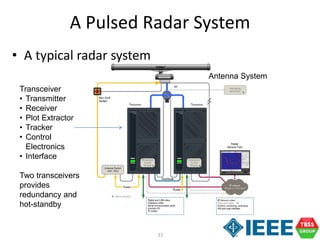
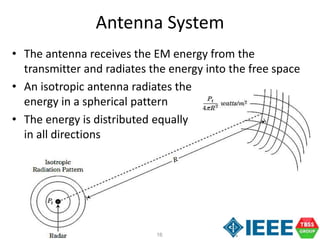
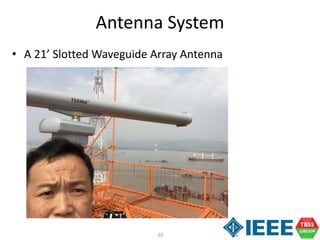
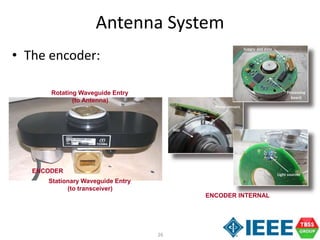
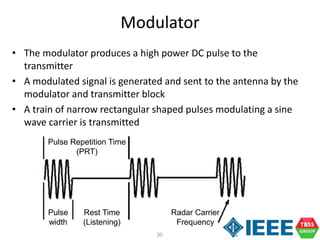
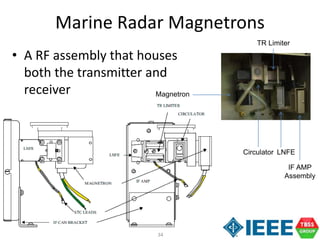
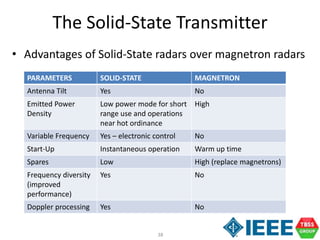
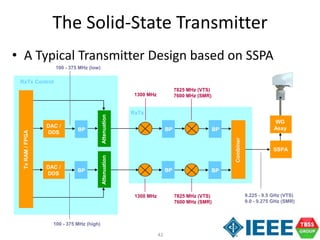
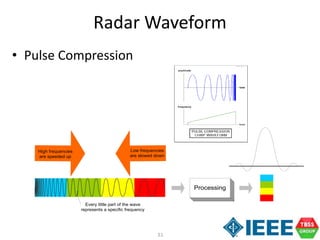
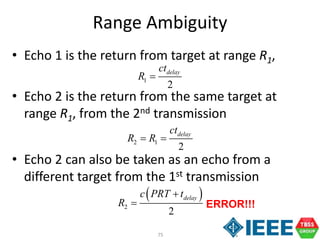
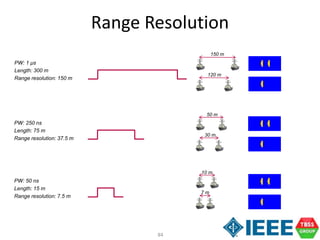
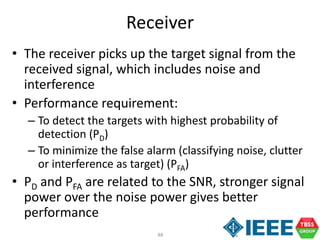
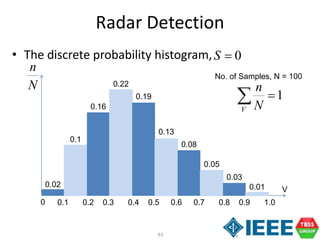
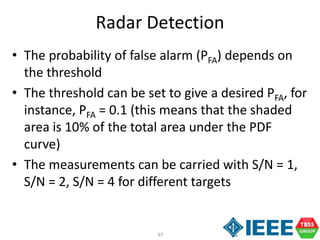
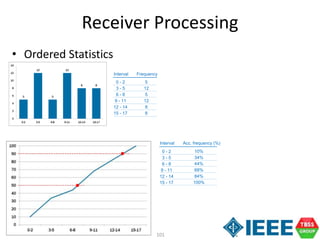
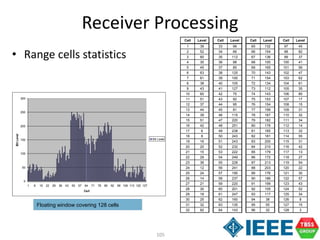
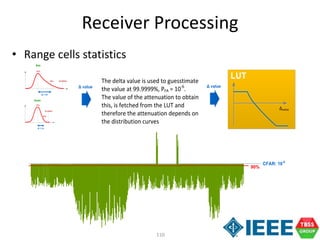
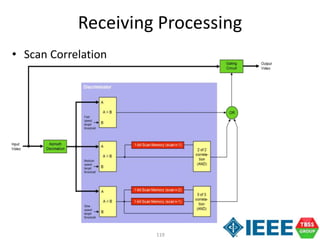
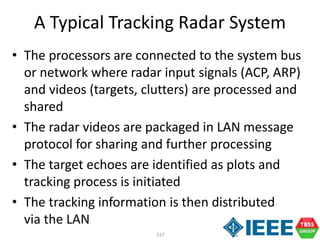
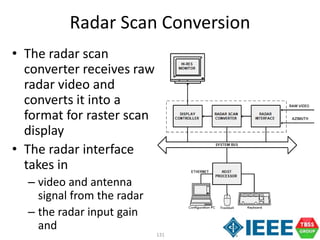
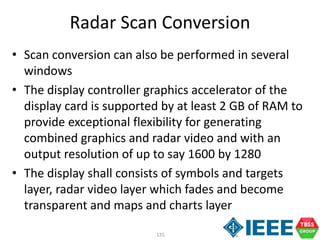
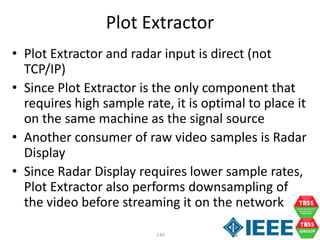
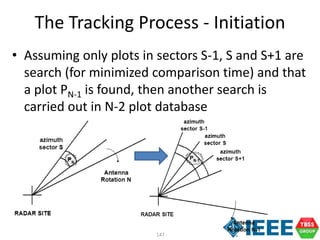
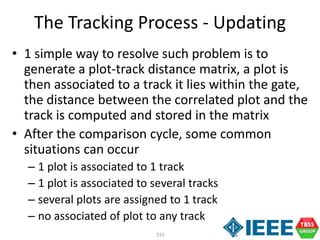
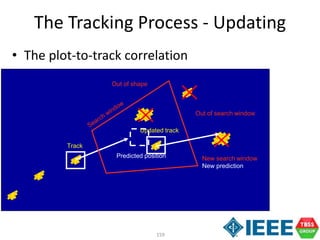
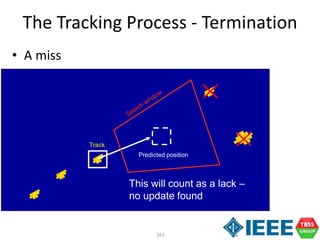
LUT
(Look-up
Table)
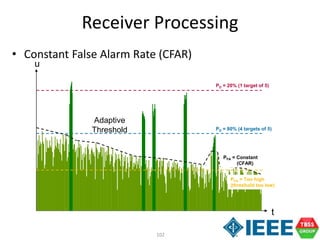
The difference in signal level
between 50% and 90%
fractile, is used to point out an
additional attenuation in the
LUT
- Att.
Signal Level
(90% - 50%)
Interval Frequency [%]
Frequency [%],
accumulated
0-15 8,6 8.6
16-31 11,7 20.3
32-47 18,0 38.3
48-63 11,7 50.0
64-79 1,6 51.6
80-95 5,5 57.1
96-111 4,7 61.8
112-127 4,7 66.5
128-143 5,5 72.0
144-159 3,1 75.1
160-175 3,9 79.0
176-191 5,5 84.5
192-207 3,9 88.4
208-223 3,9 92.3
224-241 3,1 95.4
240-255 4,7 100.0
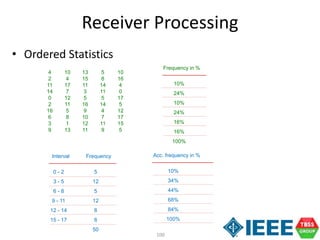
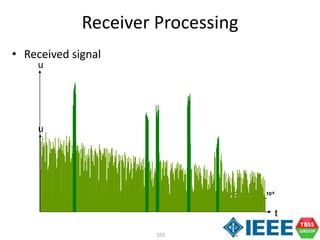
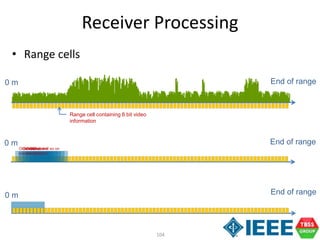
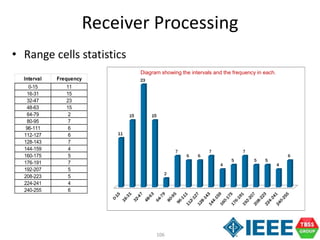
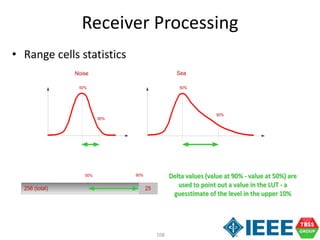
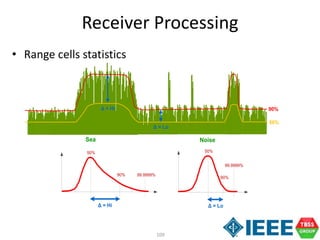
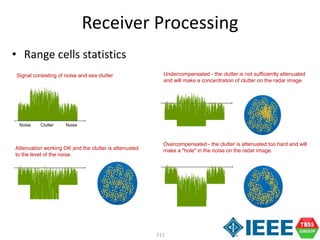
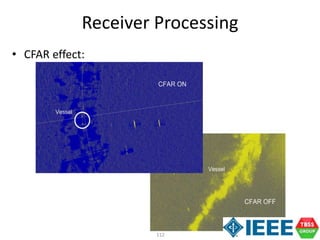
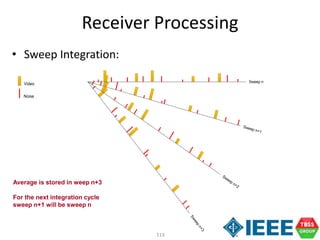
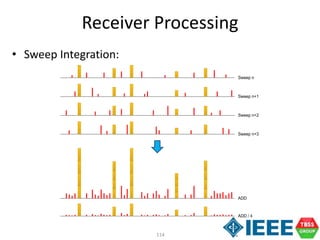
Receiver Processing
• Range cells statistics](https://image.slidesharecdn.com/ieeeatcradarsystemengineeringv3-151016034043-lva1-app6891/85/A-Tutorial-on-Radar-System-Engineering-107-320.jpg)


This document presents an extensive overview of radar systems, including components, operations, and functionalities. It details the design and performance of various radar components such as antennas, transceivers, and transmitters, emphasizing the differences between magnetron and solid-state transmitters. A significant focus is placed on pulse compression techniques and their implications for radar waveform design and detection performance.





























































































