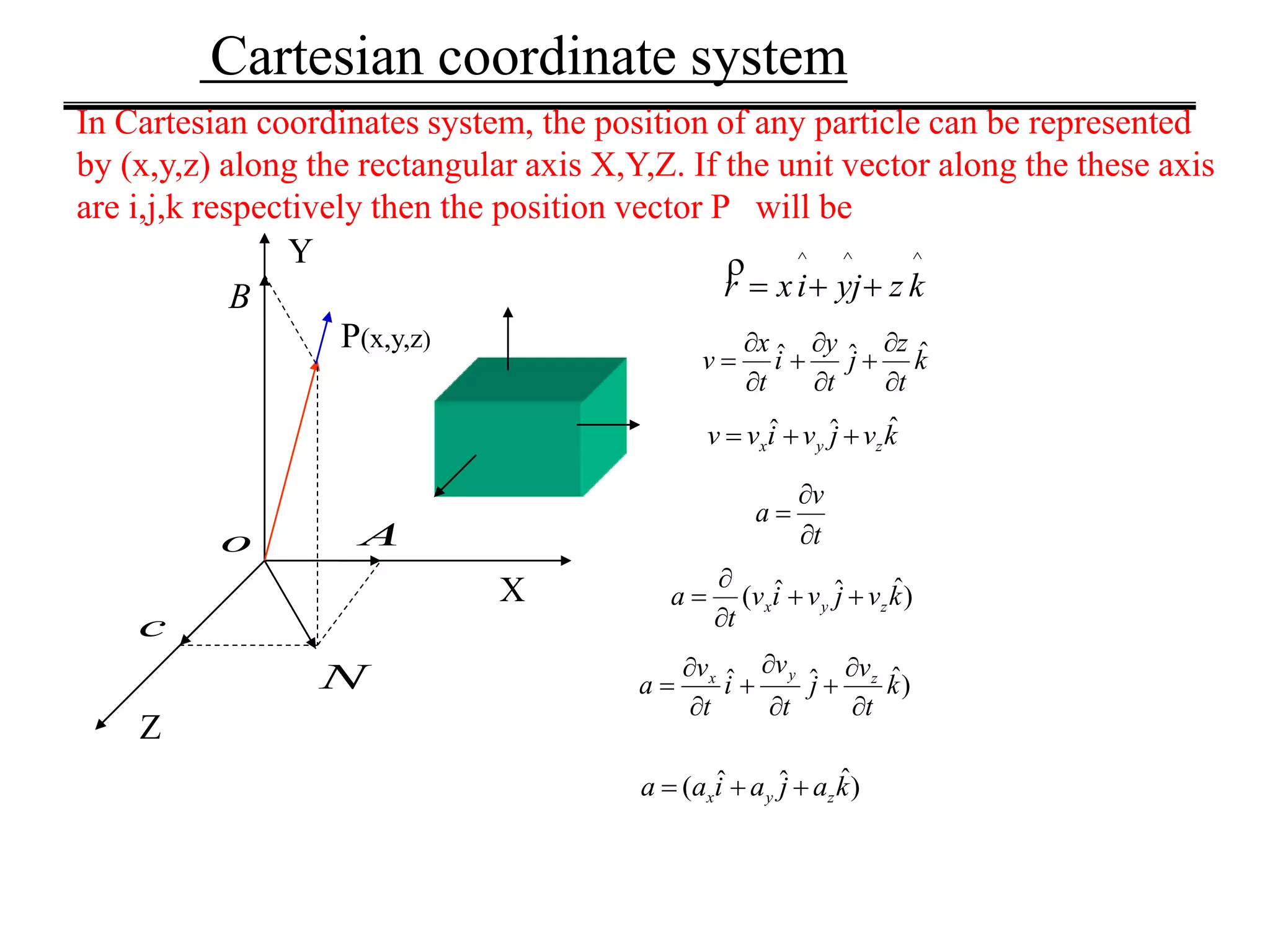
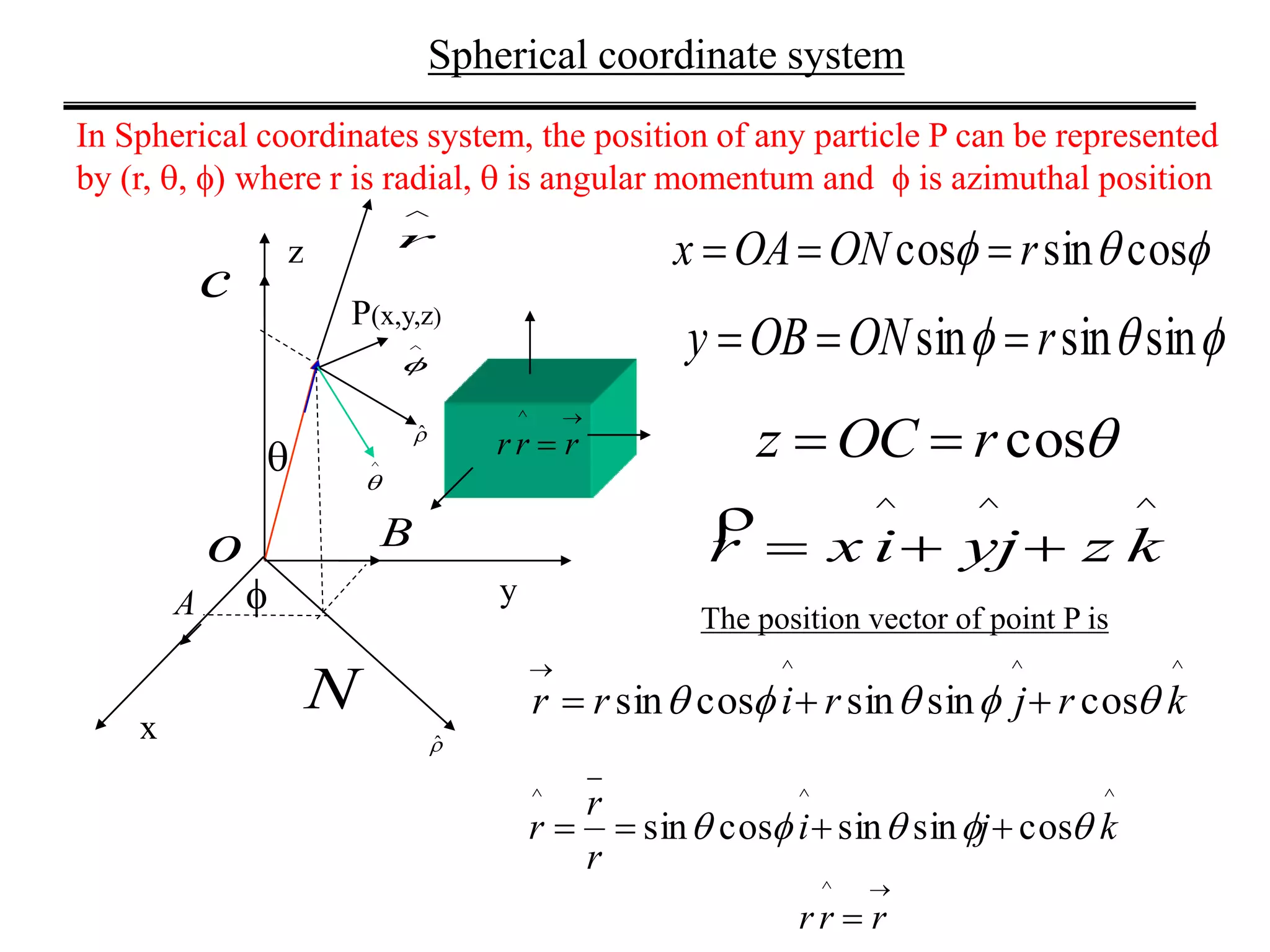
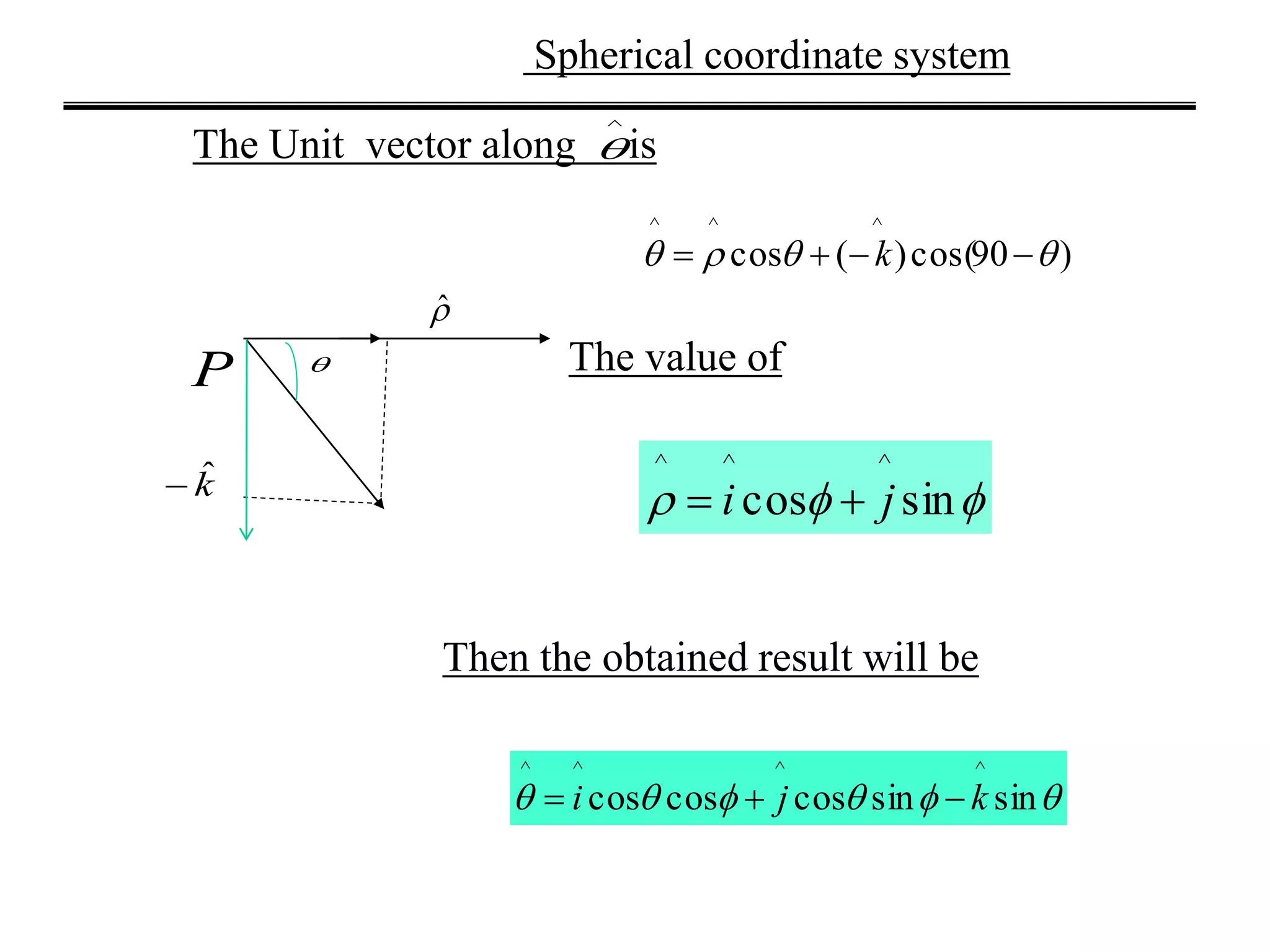
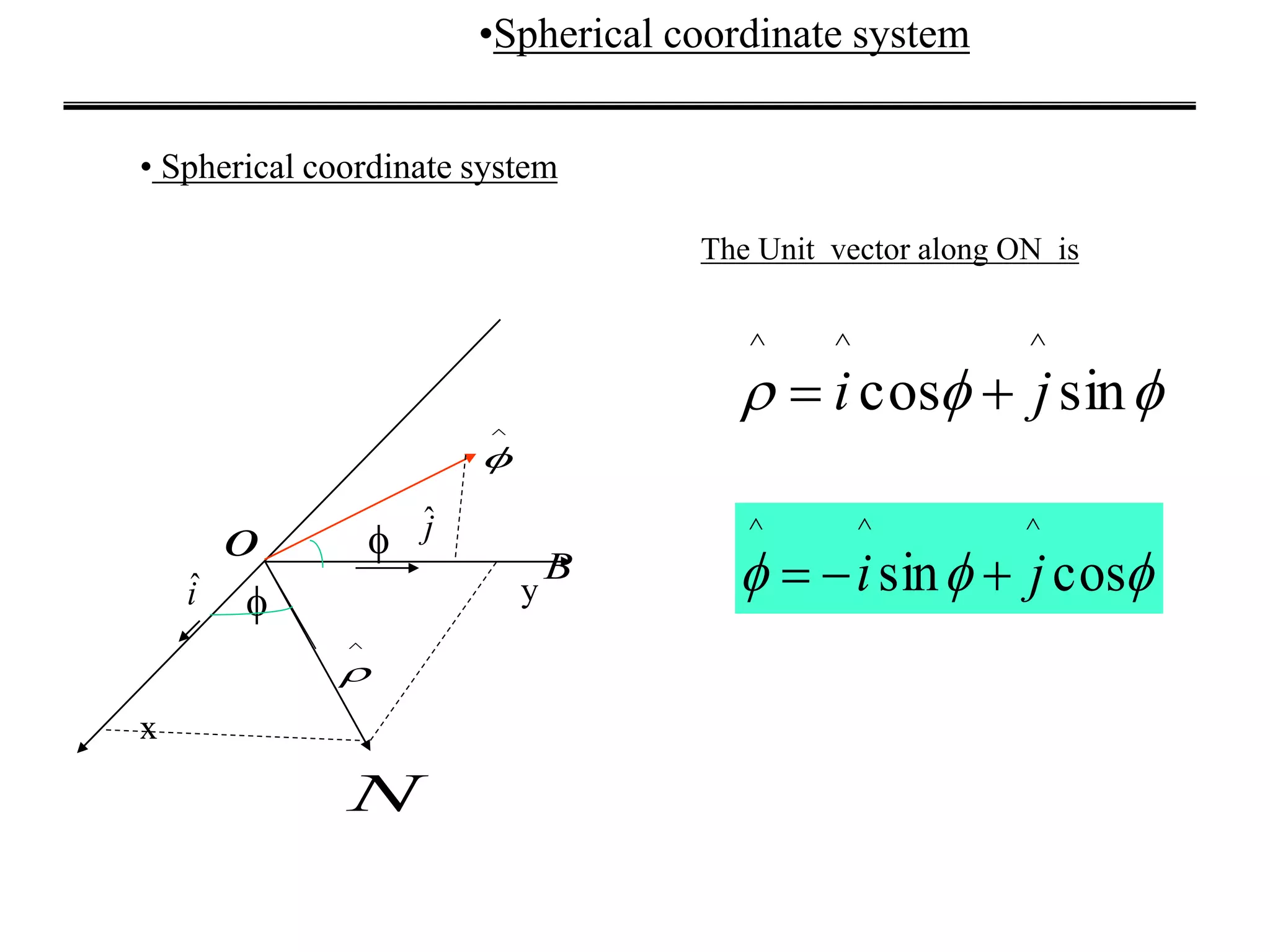
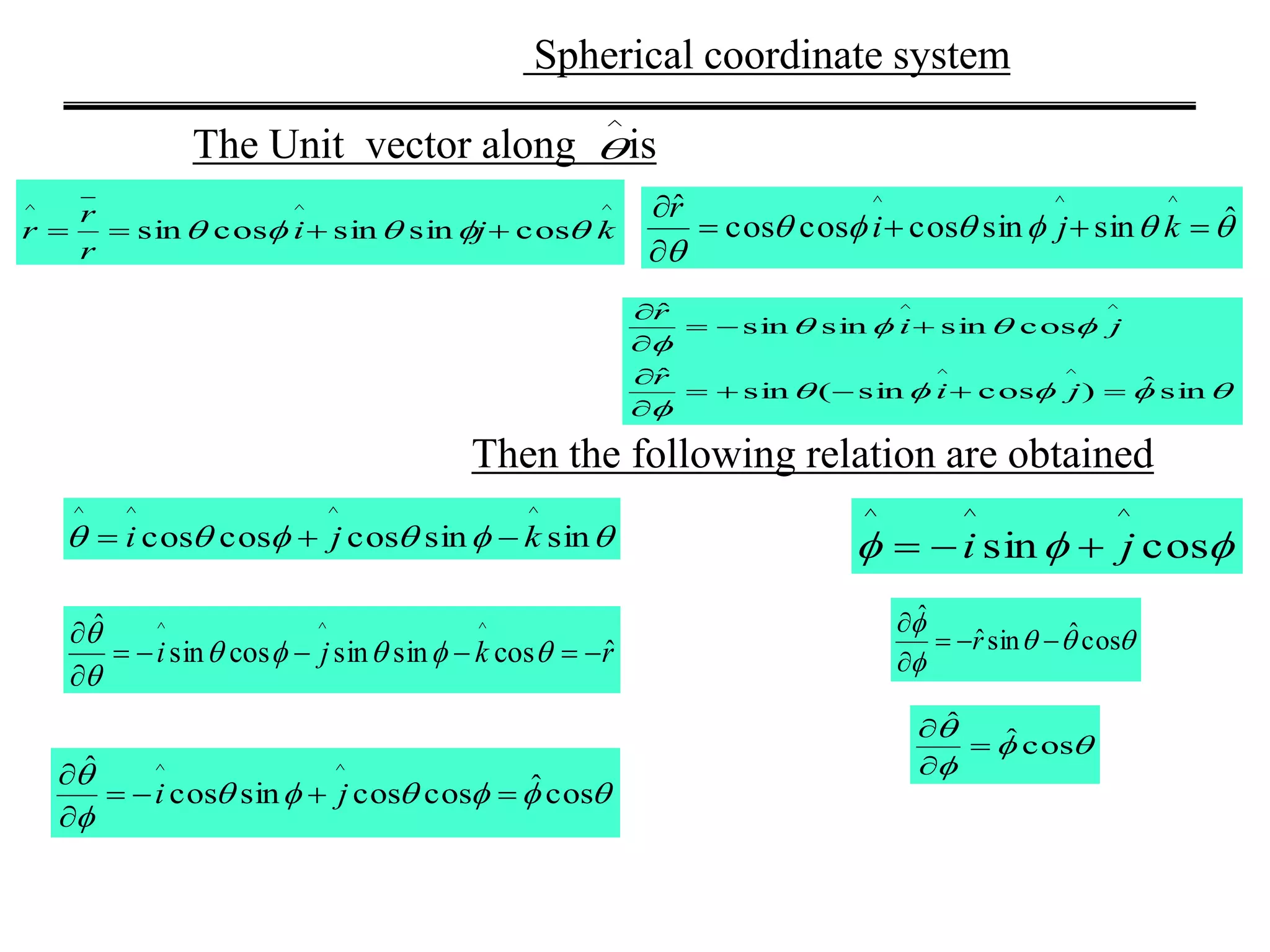
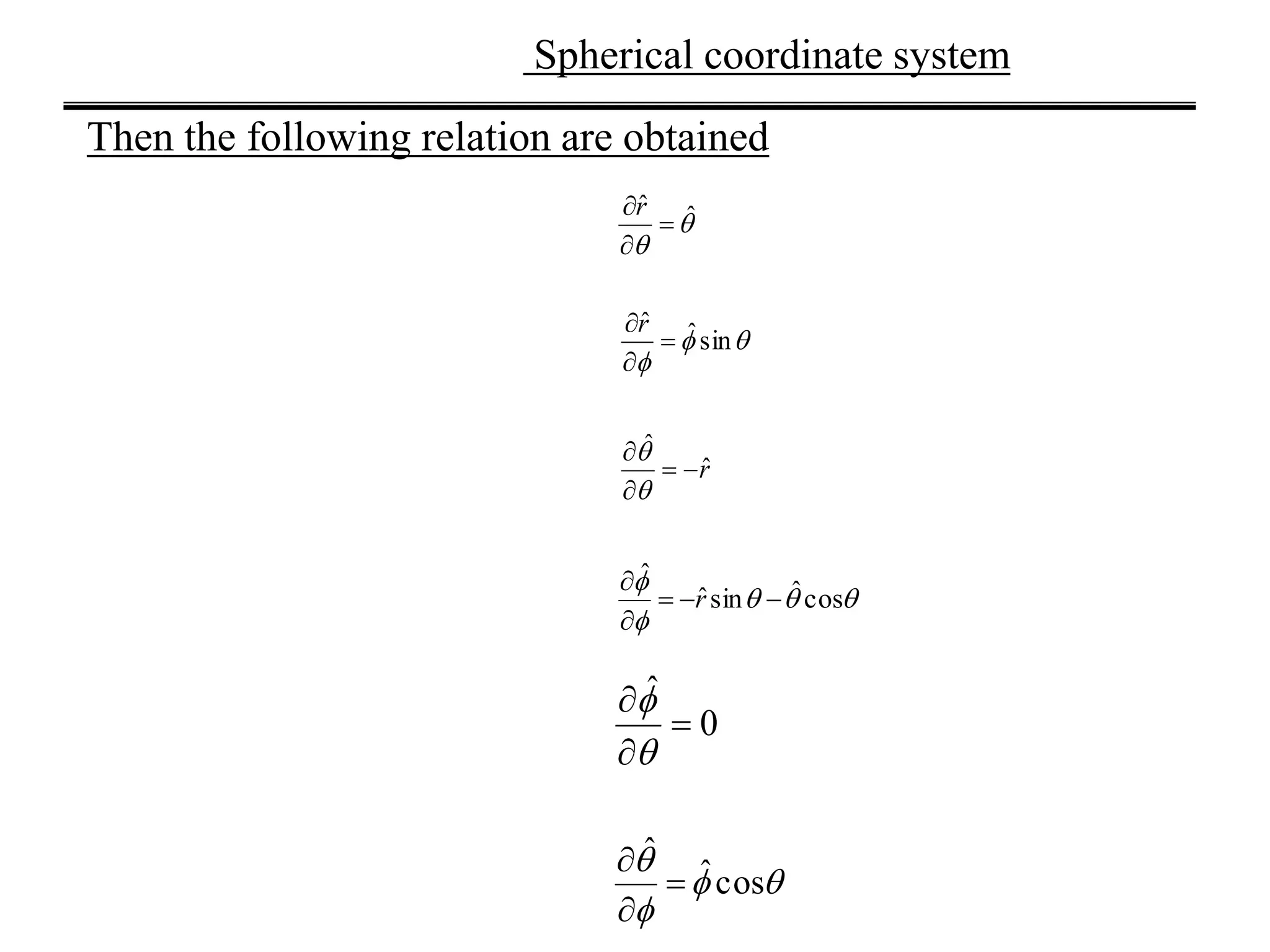
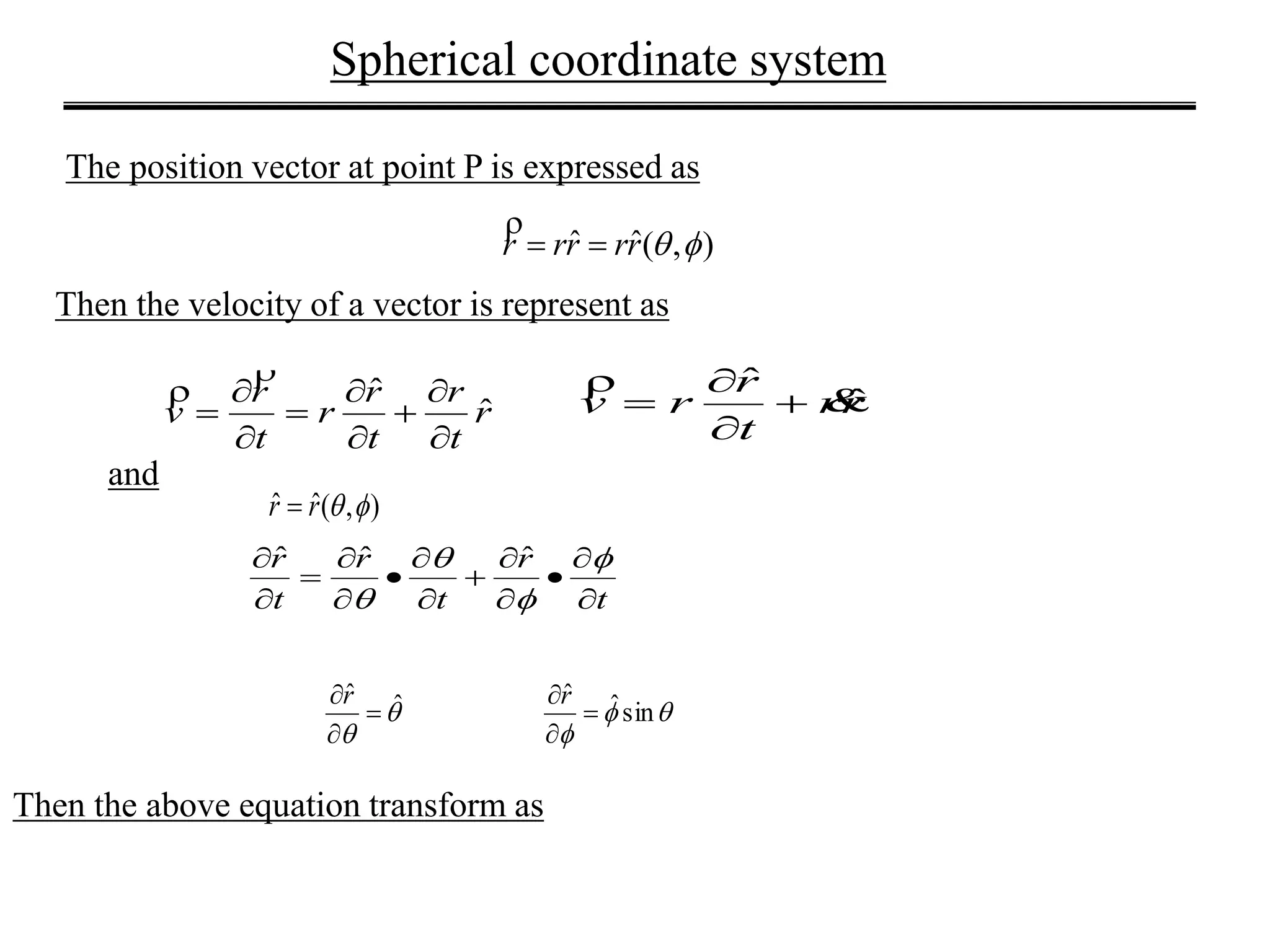
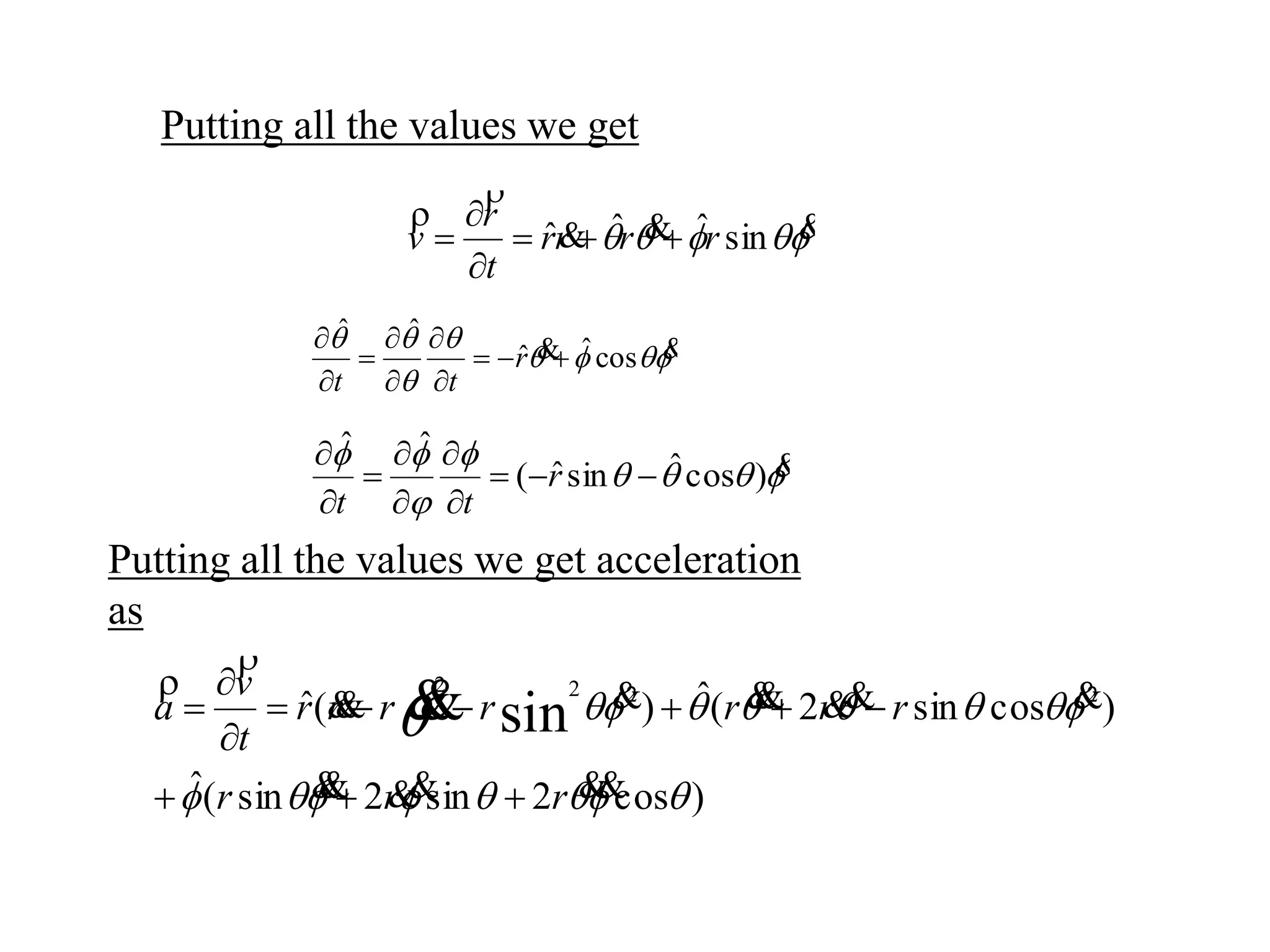
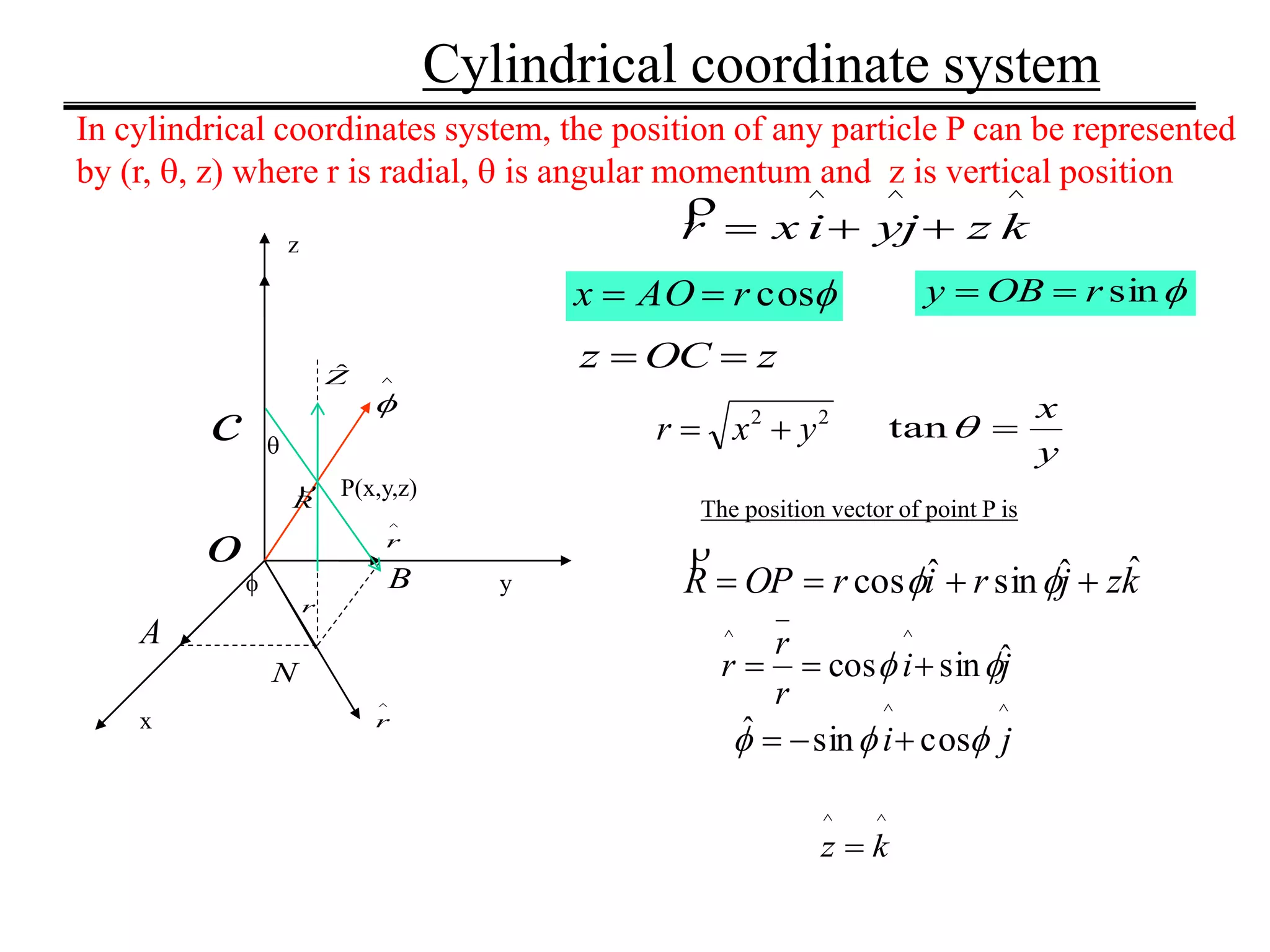
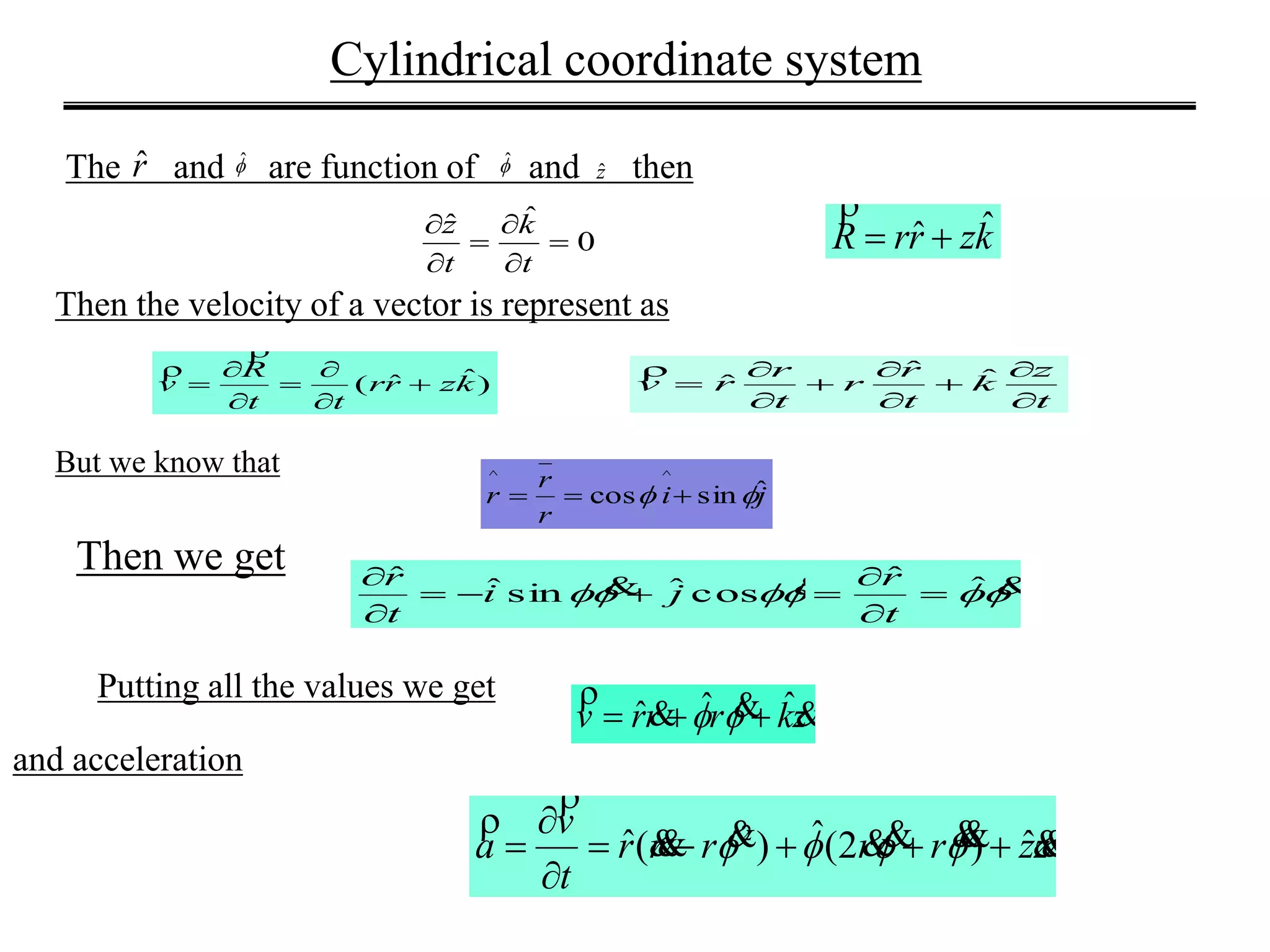
This document discusses velocity and acceleration in different coordinate systems, including Cartesian, spherical, and cylindrical coordinates. It provides the equations to calculate velocity and acceleration vectors in each system. In spherical coordinates, it defines the radial, angular, and azimuthal positions and shows how to write the position, velocity, and acceleration vectors in terms of these variables. Similarly, it defines the radial, angular, and vertical positions in cylindrical coordinates and gives the corresponding equations for velocity and acceleration.