Downloaded 151 times

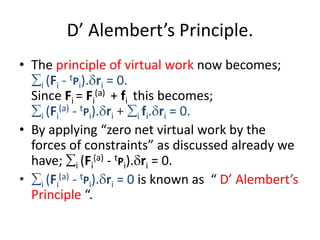
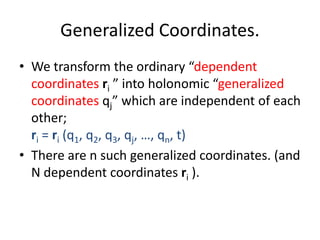
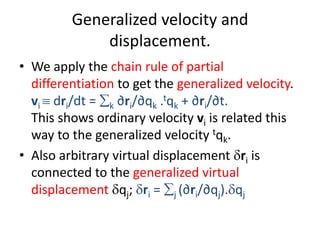
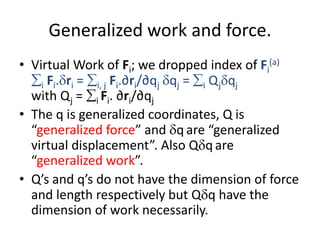

The document covers the principles of virtual displacement, virtual work, and D'Alembert's principle in classical mechanics. It distinguishes between virtual and actual displacement, discusses the conditions under which virtual work is zero, and introduces generalized coordinates and their relationships. The principles are mathematically formalized, showing how forces and motion relate within a system of particles in equilibrium.





























![[Electricity and Magnetism] Electrodynamics](https://cdn.slidesharecdn.com/ss_thumbnails/engineeringphysicsed-150823041844-lva1-app6891-thumbnail.jpg?width=640&height=640&fit=bounds)

























](https://cdn.slidesharecdn.com/ss_thumbnails/virtualworkmodifiedcompatibilitymode1-160126134241-thumbnail.jpg?width=640&height=640&fit=bounds)























![谷歌留痕技术 [ 𝙩𝙤𝙥 𝟮𝟯𝟯. 𝙘 𝙤𝙢 ]](https://cdn.slidesharecdn.com/ss_thumbnails/top233-260130174328-3833018c-thumbnail.jpg?width=640&height=640&fit=bounds)

