Downloaded 750 times
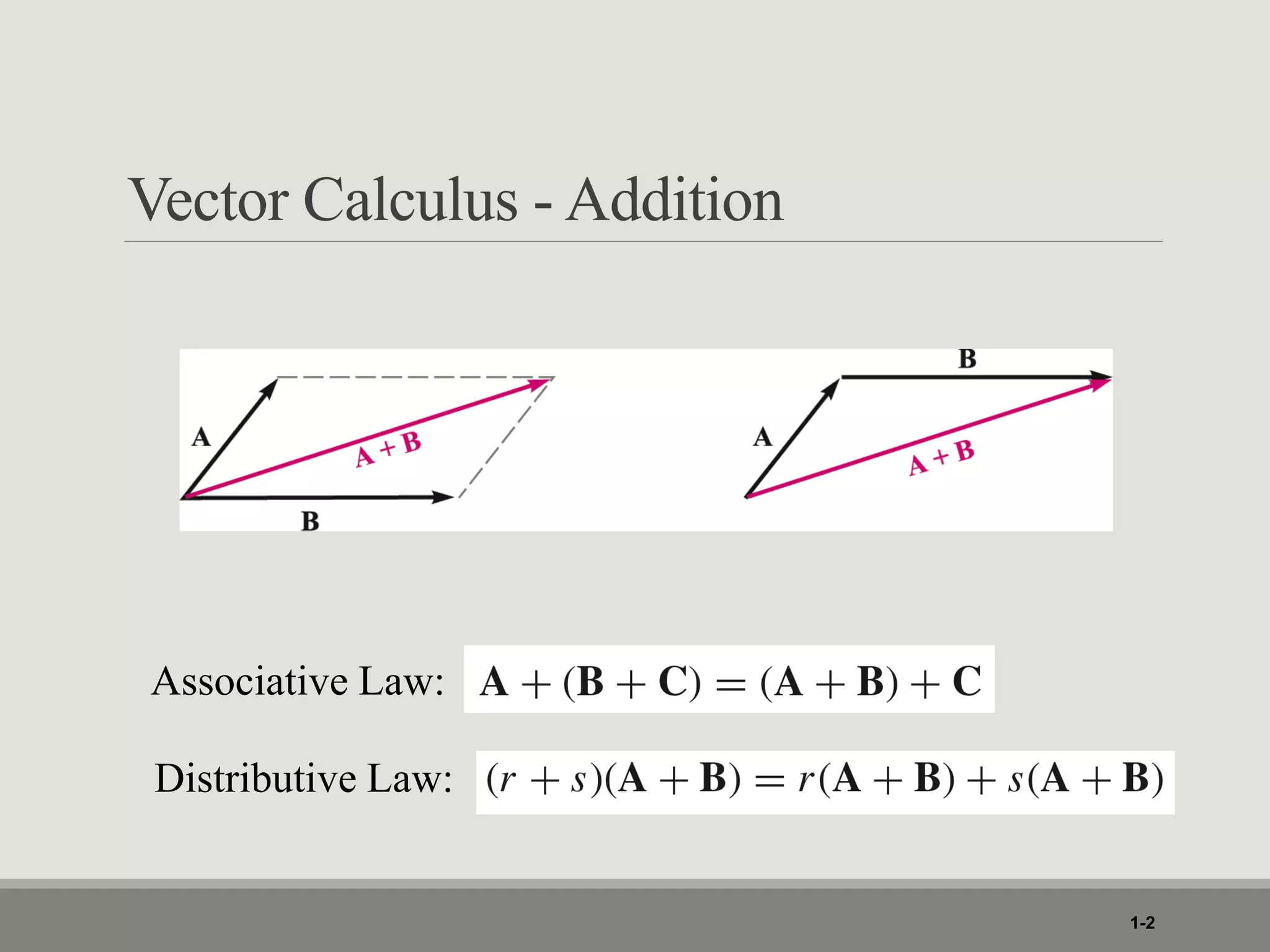
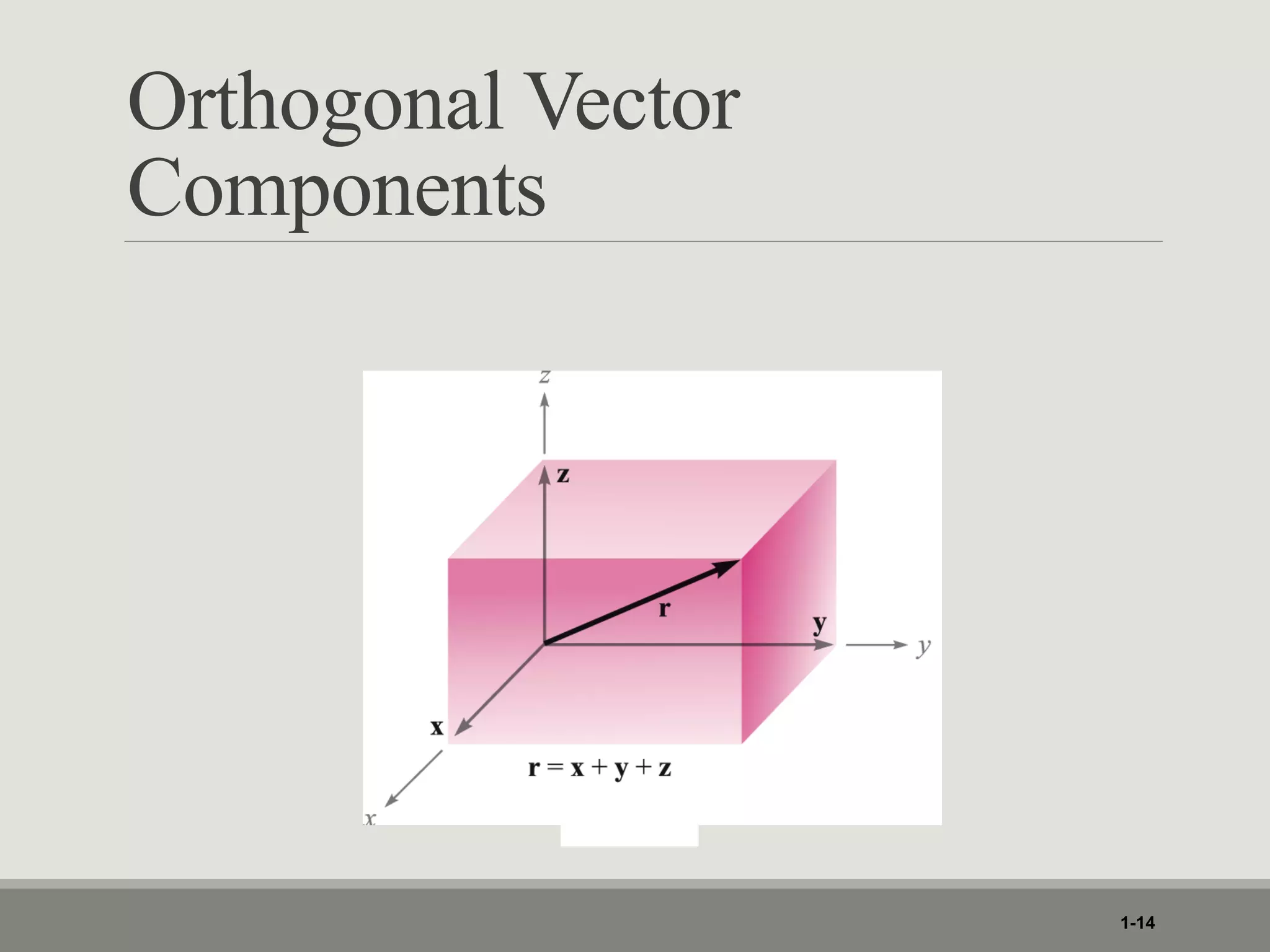
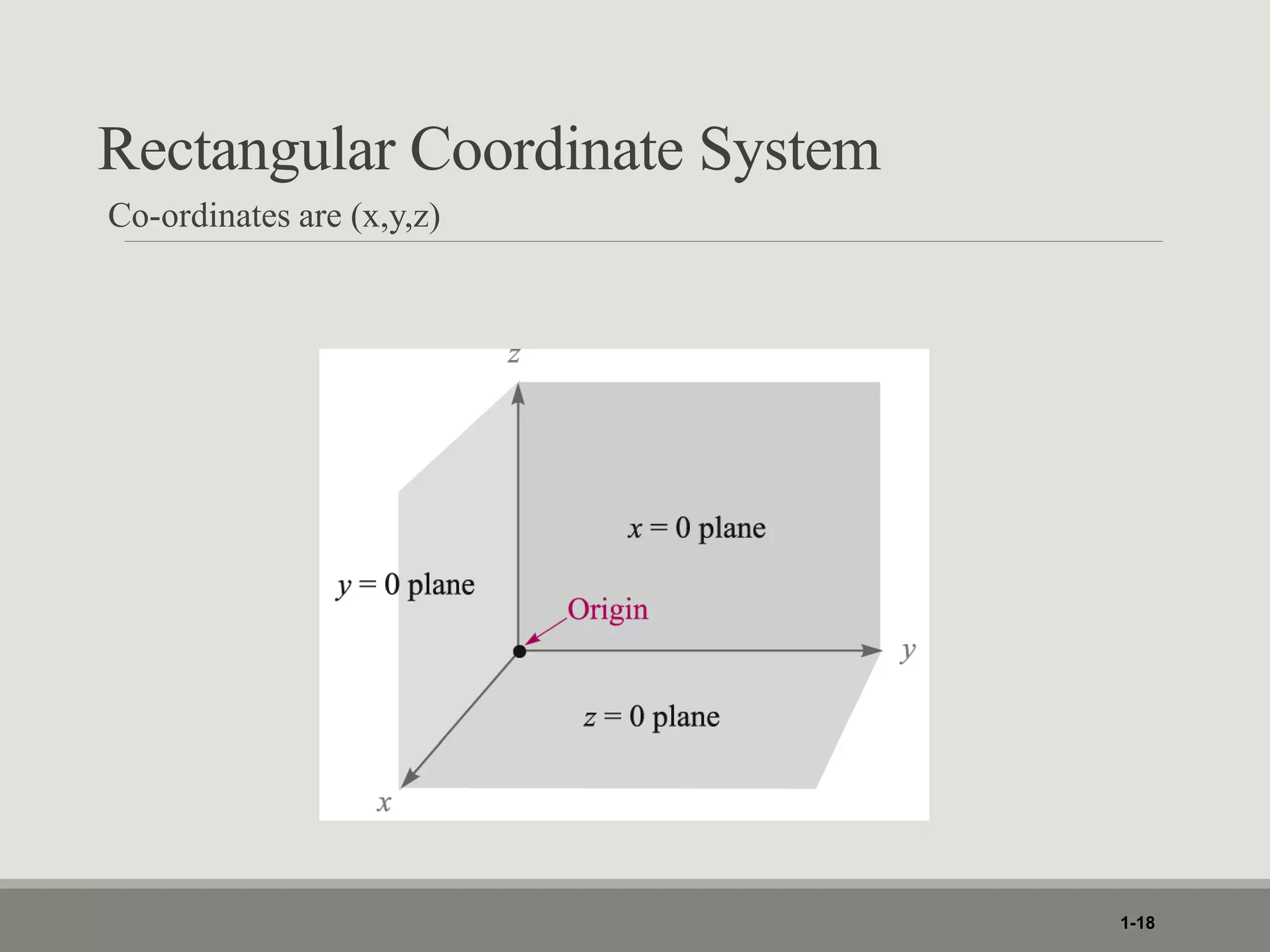
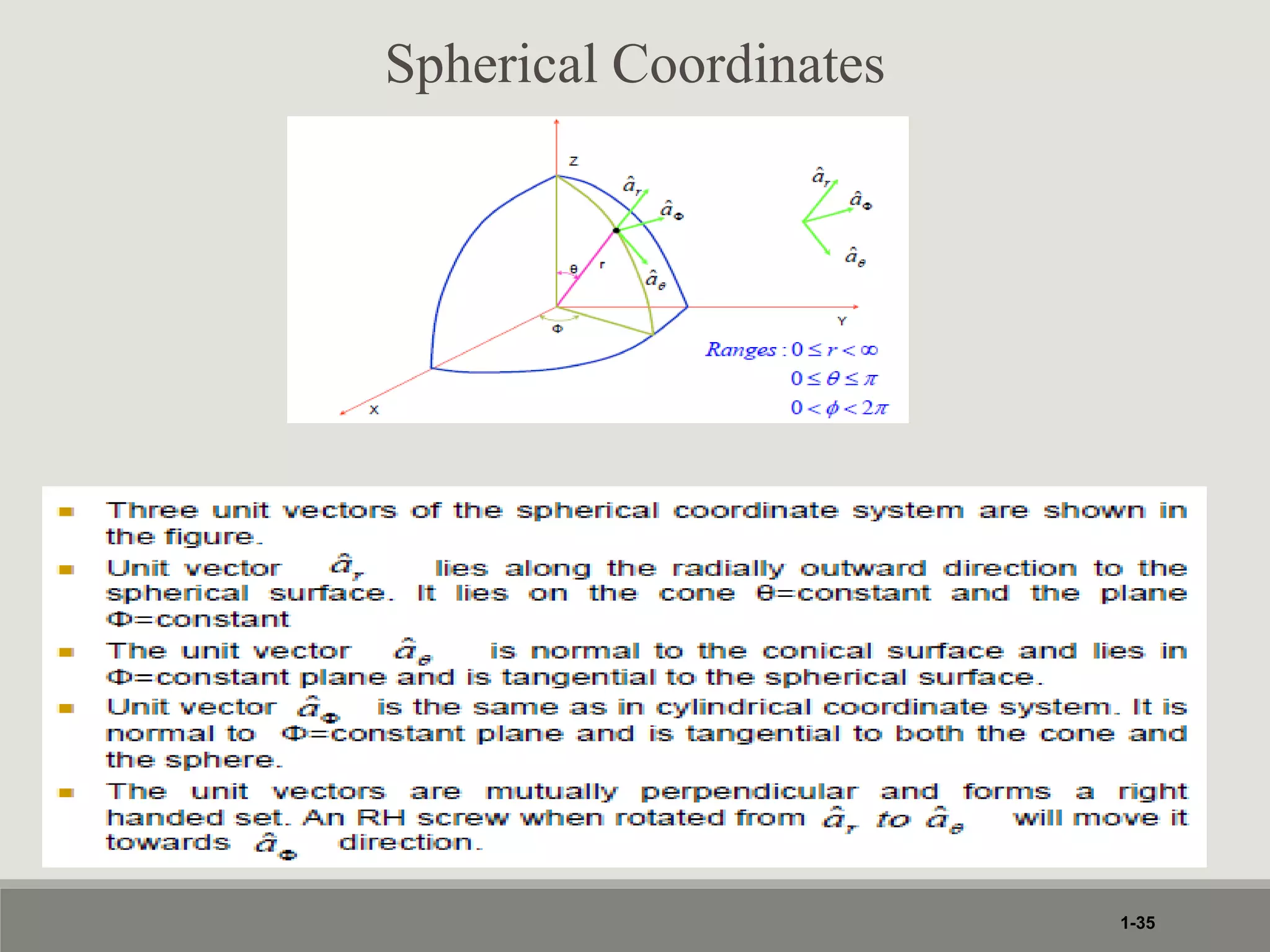
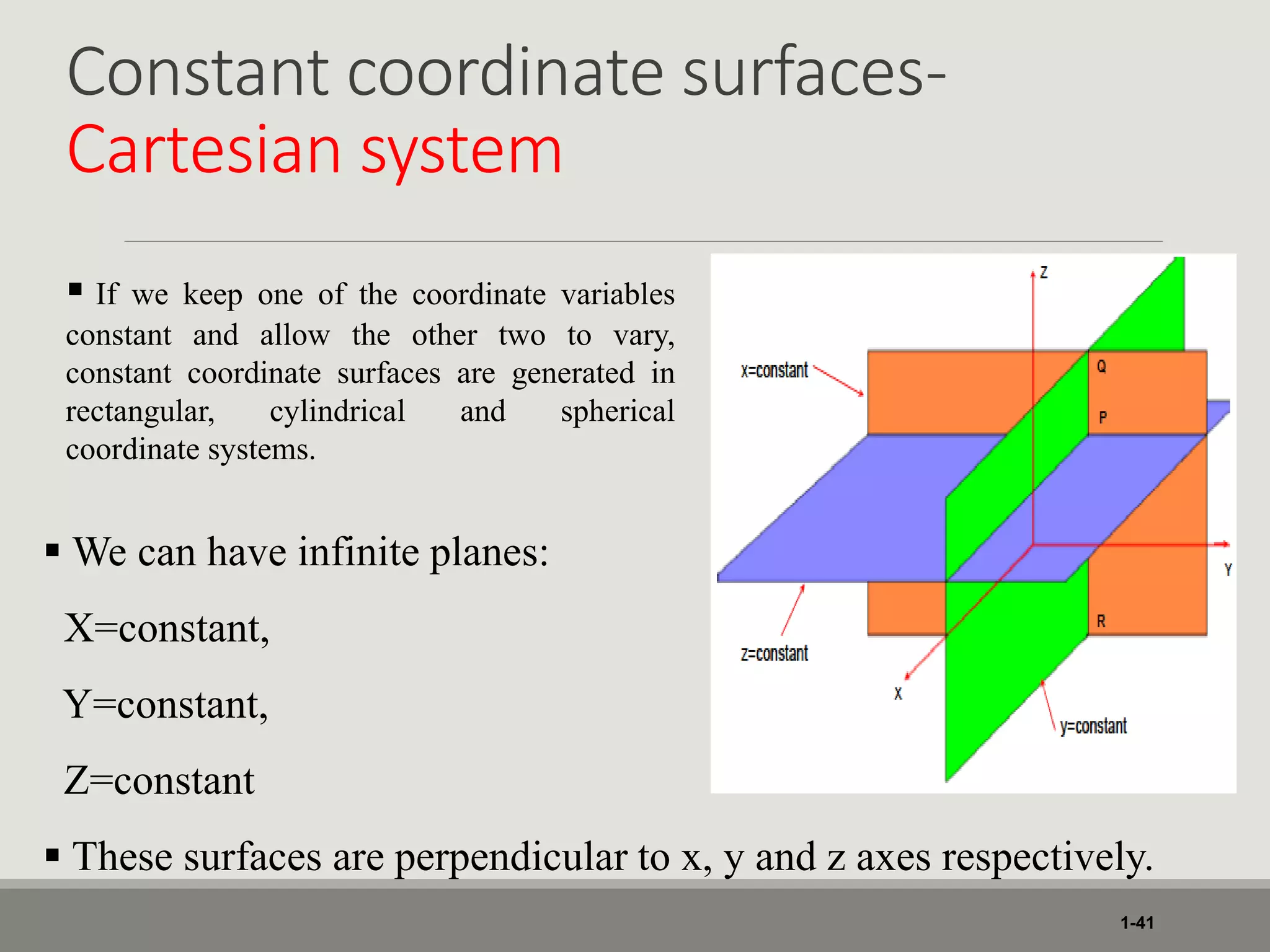
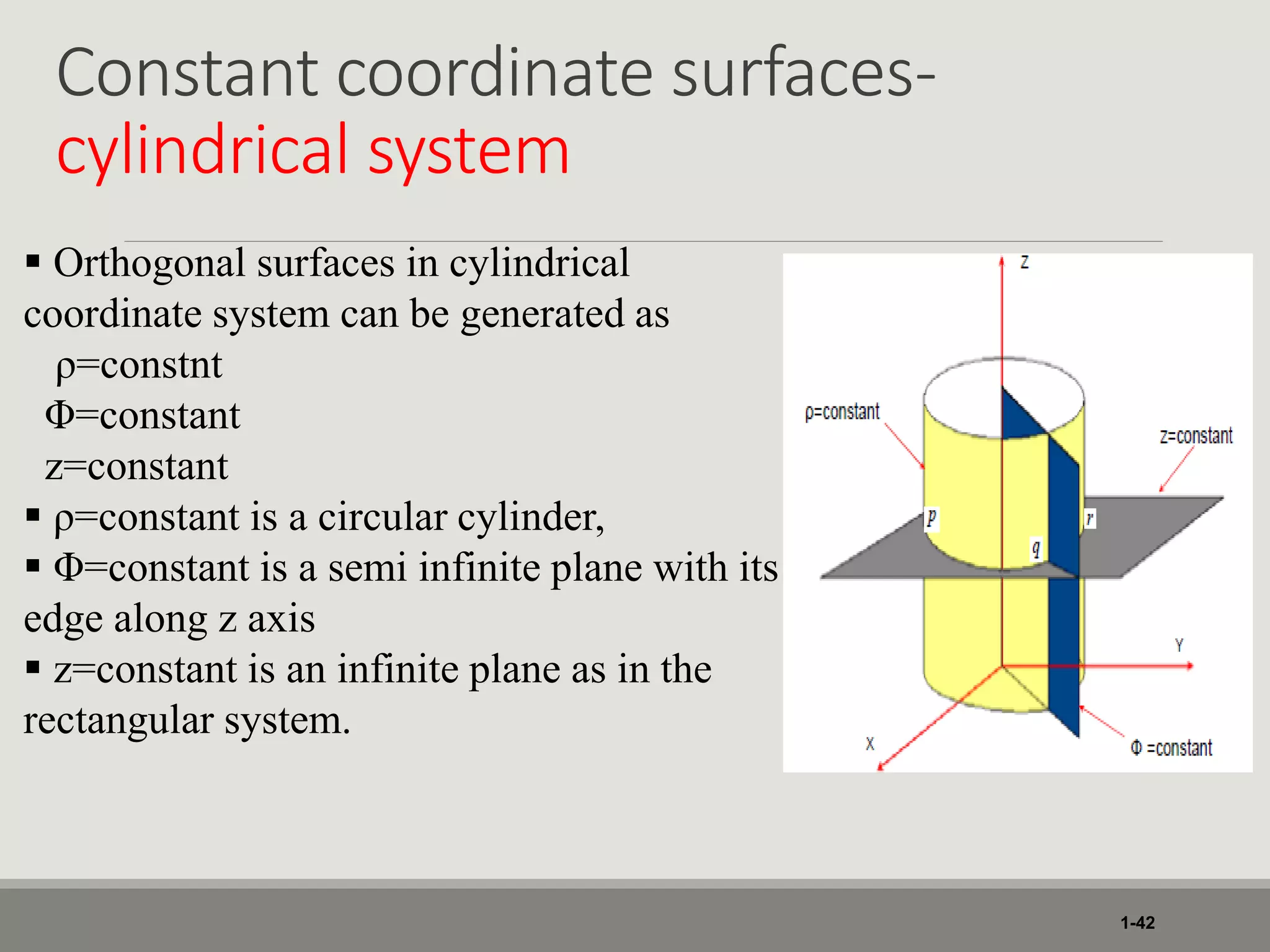
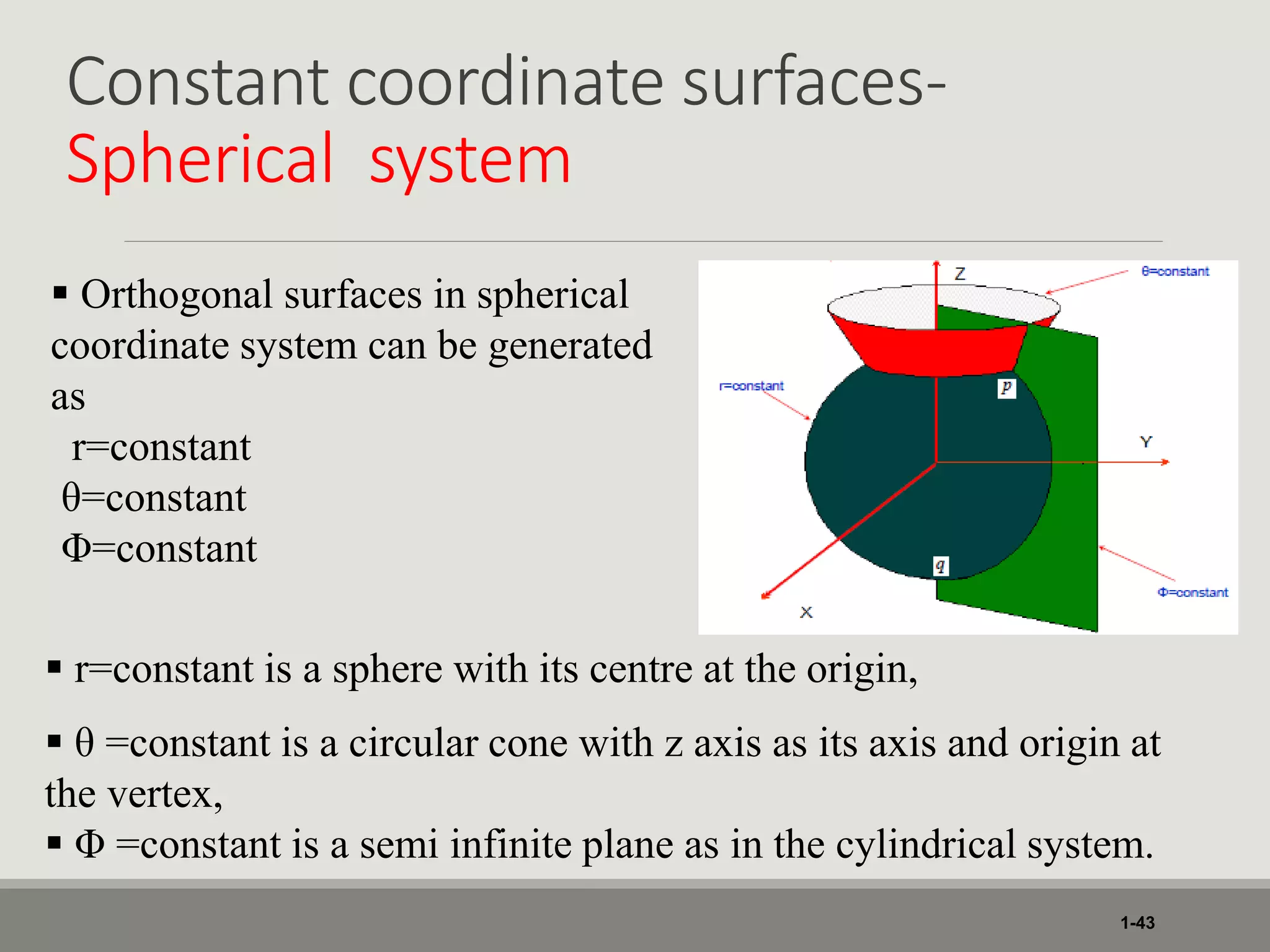
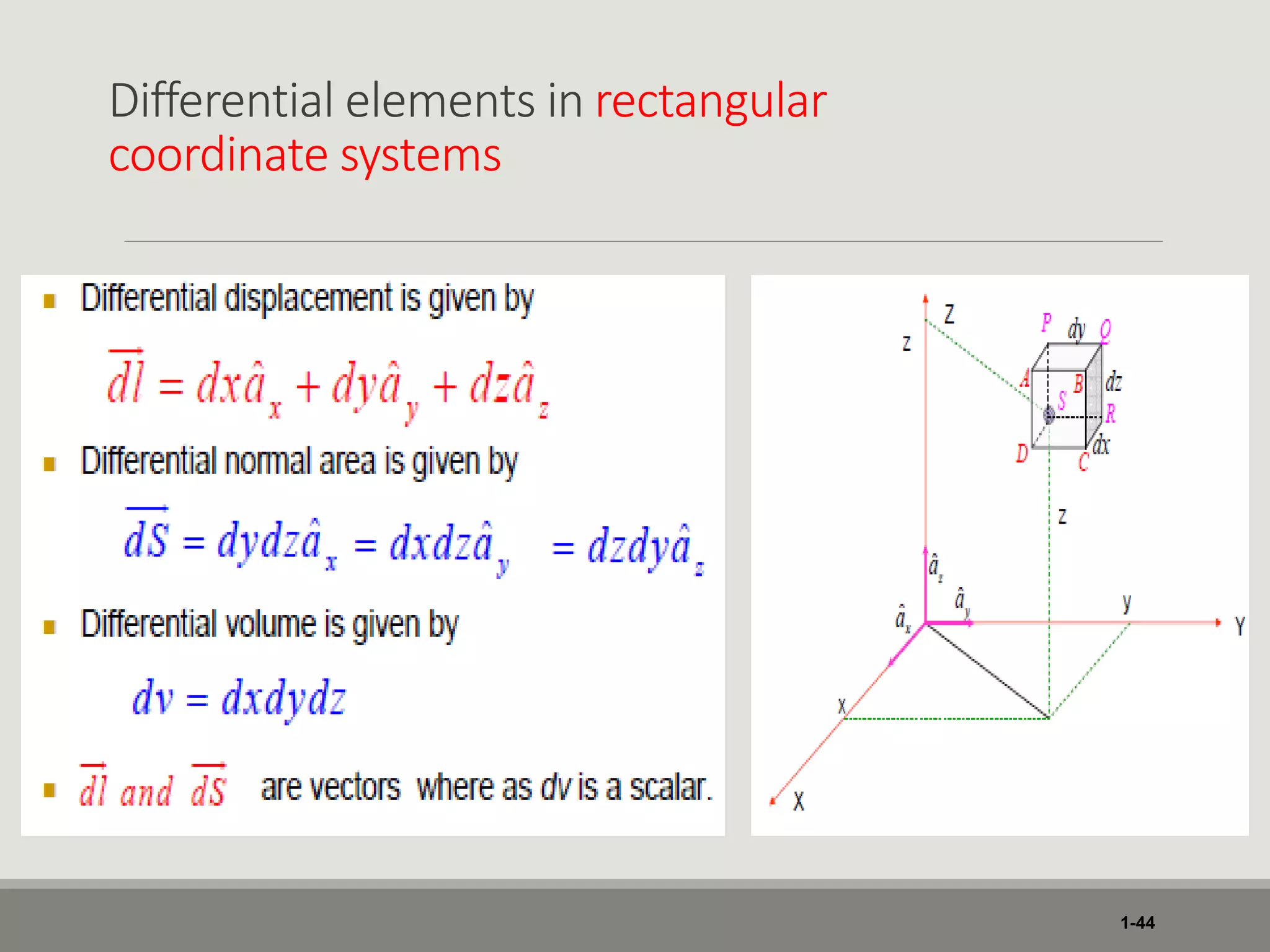
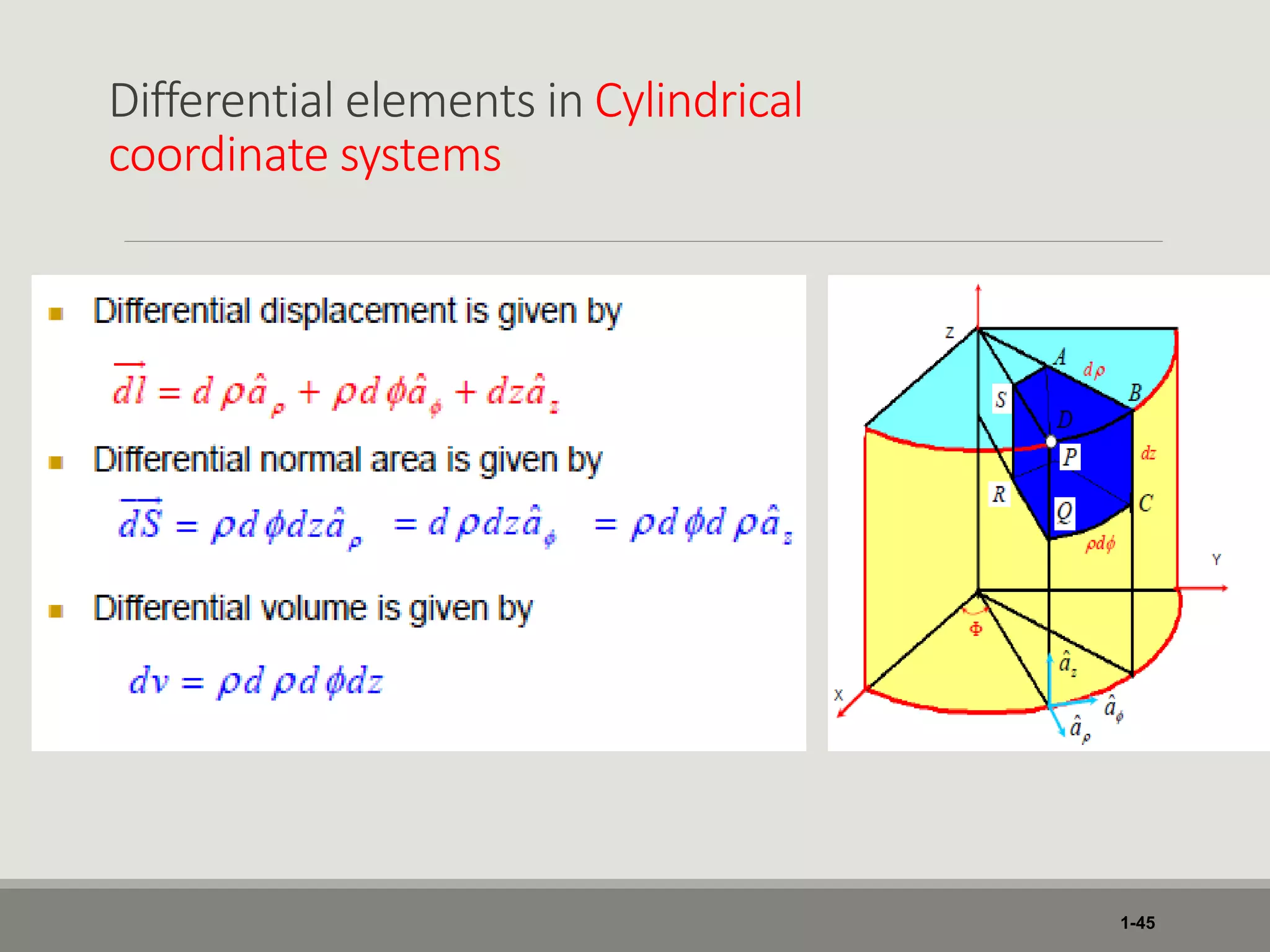

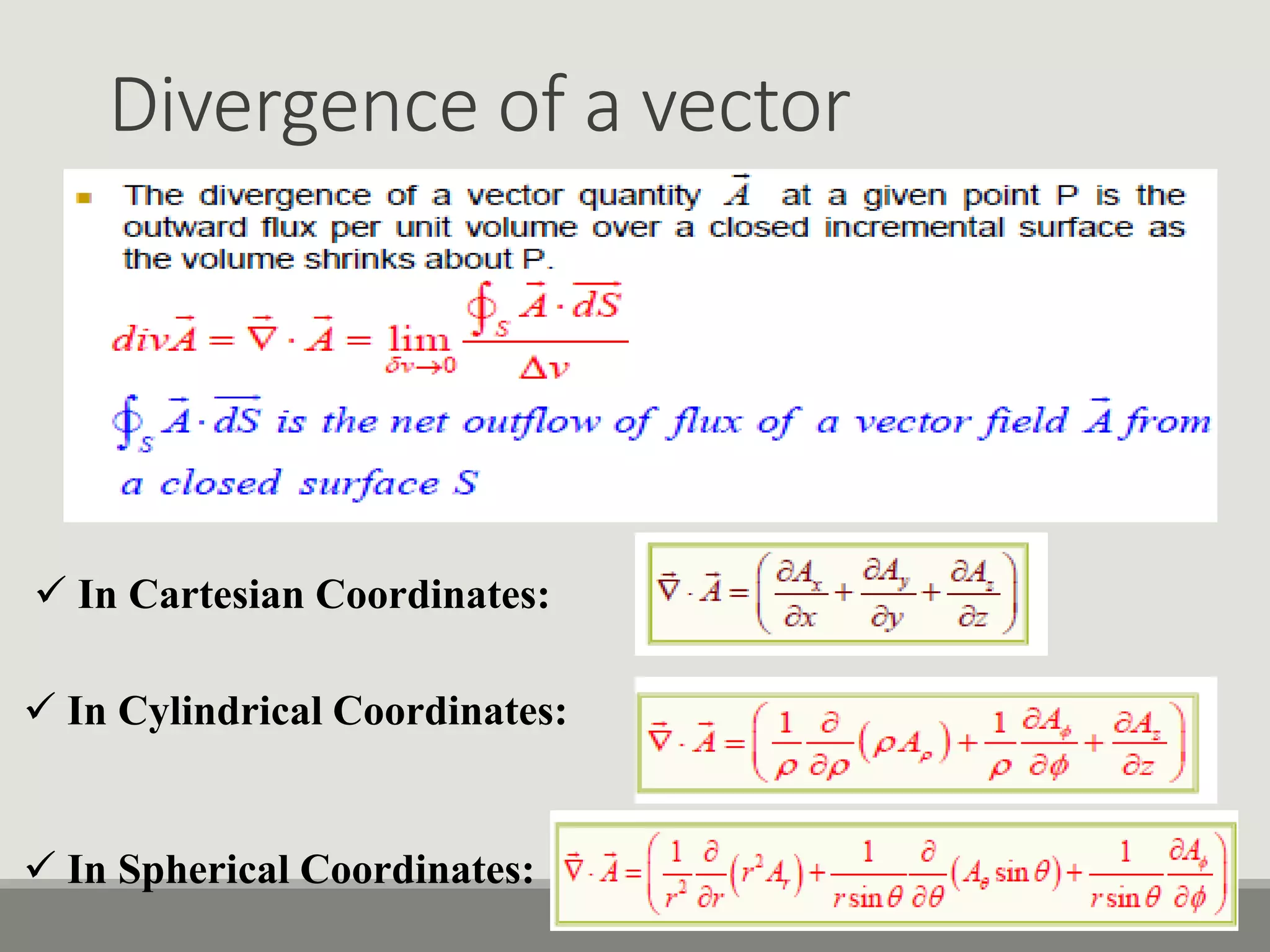
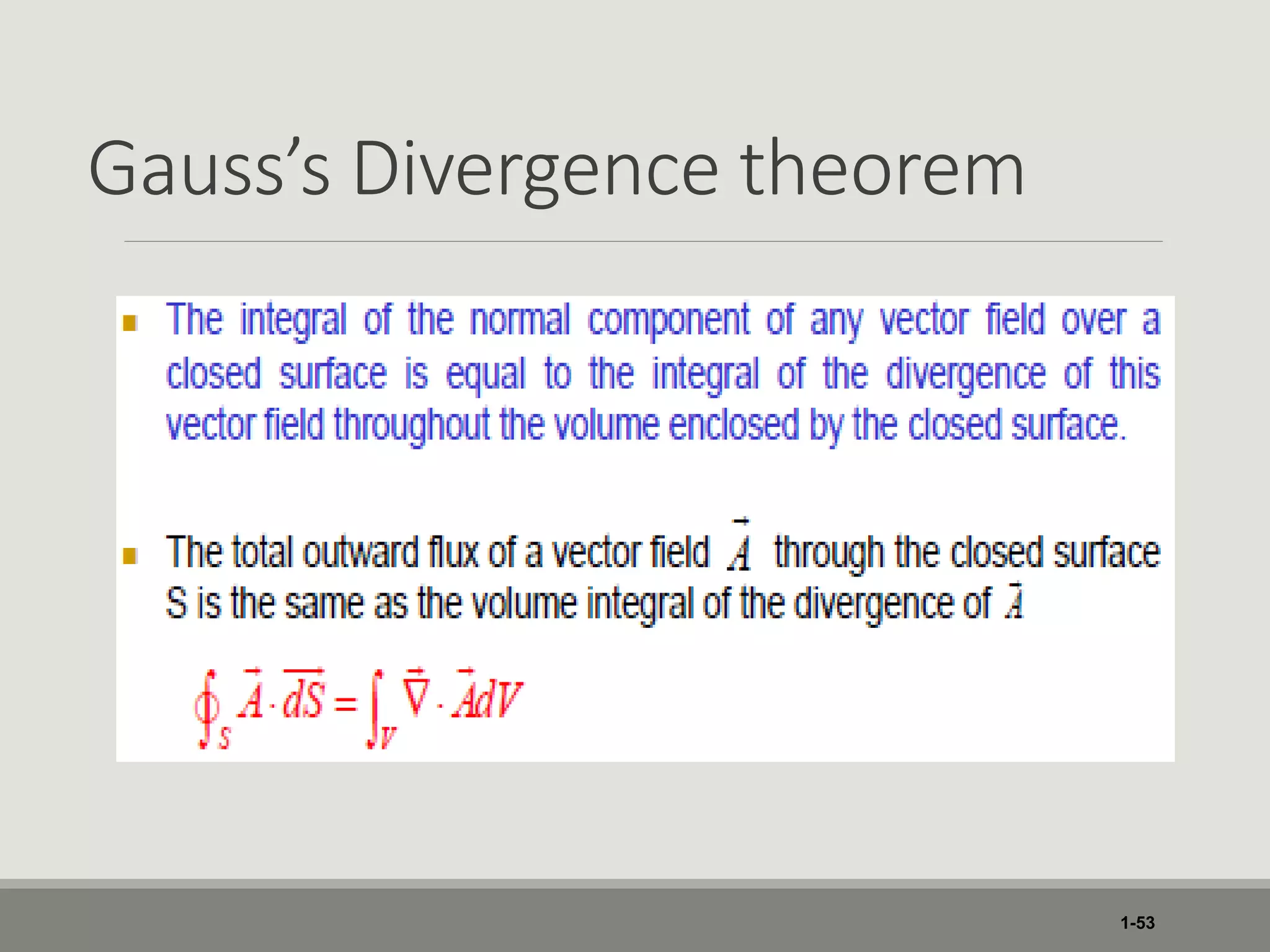
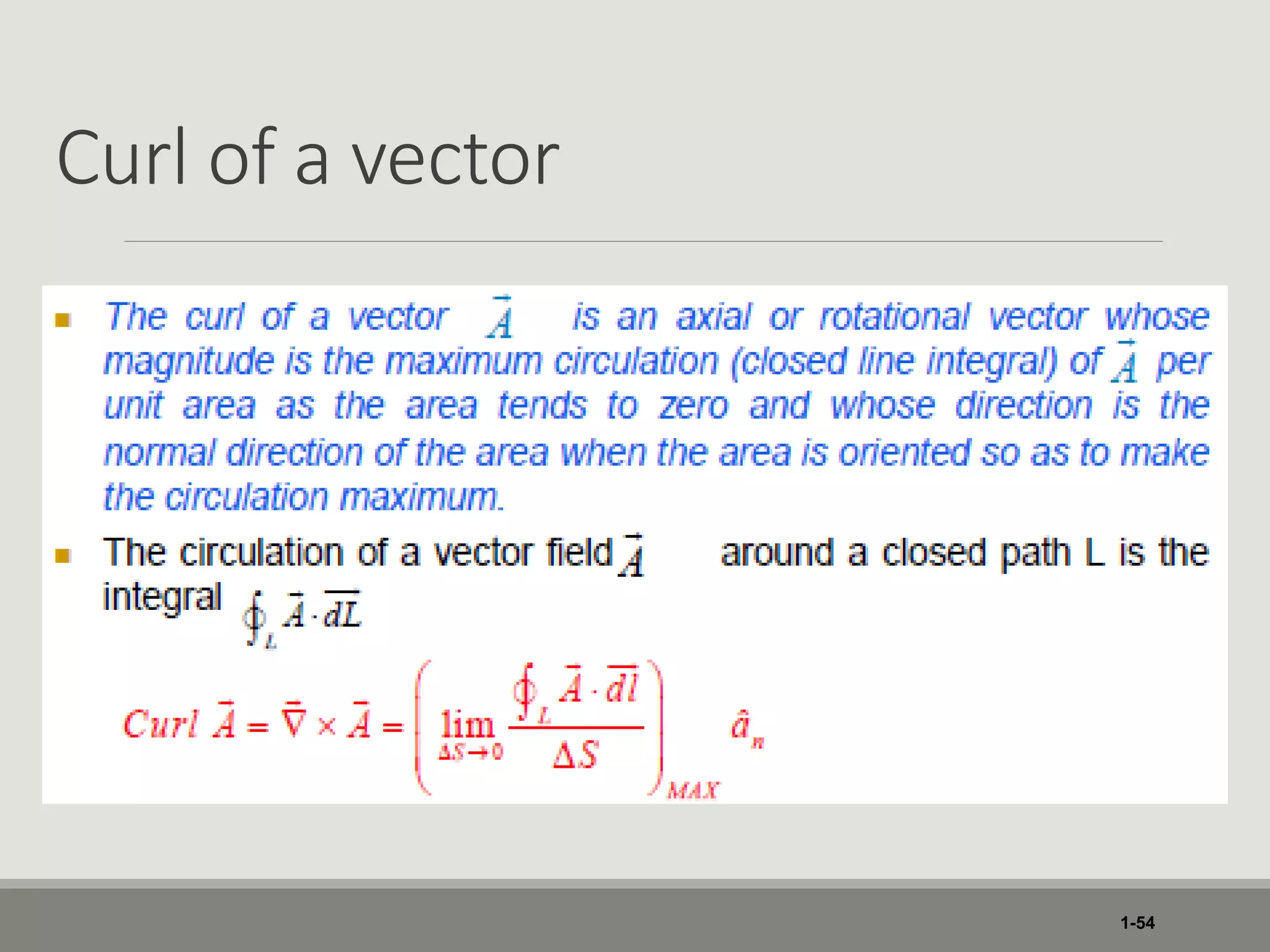
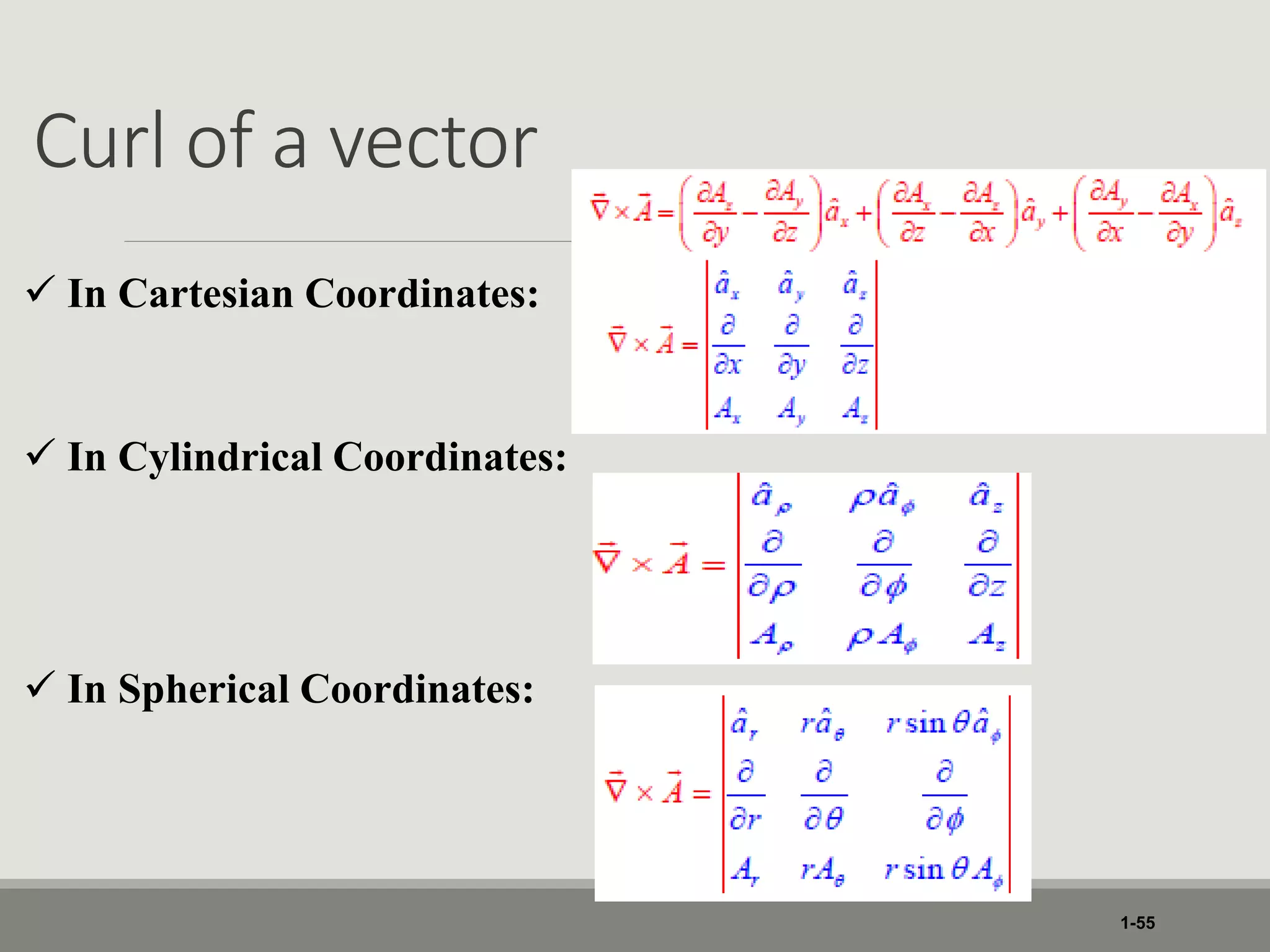


1. The document discusses different coordinate systems including rectangular, cylindrical, and spherical coordinates. It defines scalar and vector fields and provides examples. 2. Key concepts covered include the dot product, cross product, gradient, divergence, curl, and Laplacian as they relate to vector and scalar fields in different coordinate systems. 3. Various coordinate transformations are demonstrated along with differential elements, line integrals, surface integrals and volume integrals in each system.