Downloaded 192 times
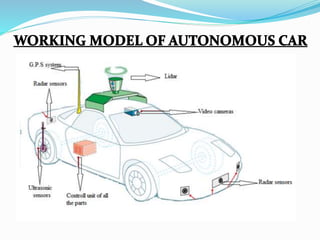
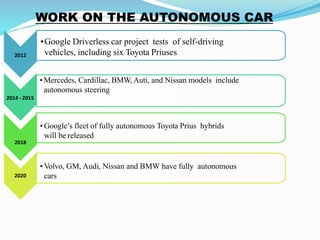


The document discusses autonomous vehicles and their components. It notes that autonomous vehicles can drive themselves without human assistance using sensors like LIDAR, radar, cameras and ultrasonic sensors connected to a central CPU. The document provides a brief history of autonomous vehicles, outlines the hardware components and their functions. It also discusses some of the work done on autonomous vehicles between 2012-2020, and lists potential advantages like reduced accidents and disadvantages like hacking risks.












































































