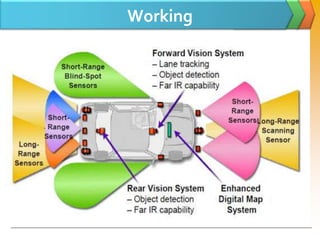
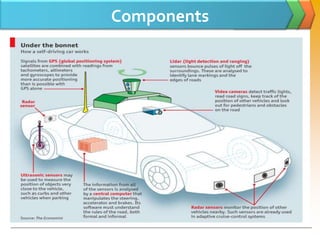
The document discusses autonomous cars, including their history from early experiments in the 1920s to working prototypes in the 1980s. It describes the key components of autonomous cars like LIDAR, radar, cameras and GPS that work together to navigate and drive the vehicle without human assistance. The document also outlines some advantages like increased safety and productivity, as well as challenges to widespread adoption like sensor limitations in heavy weather and high manufacturing costs.