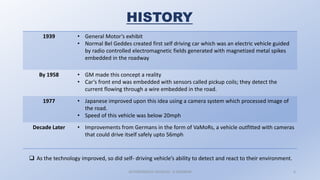
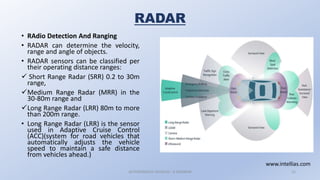
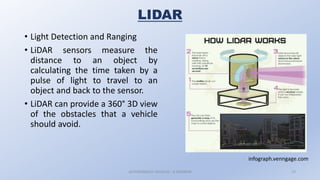
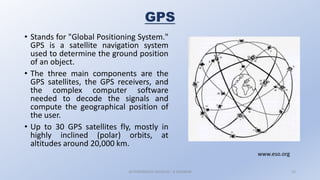
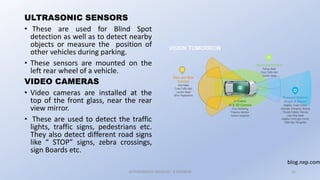
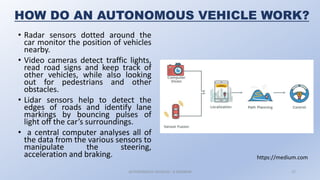
The seminar discusses autonomous vehicles, defined as self-driving cars capable of navigating from a starting to a predetermined location using various technologies. It covers the history of autonomous driving, advancements in technology, and the potential benefits such as reduced accidents, traffic congestion, and lower emissions, alongside challenges like trust, hacking, and unemployment. Key technologies include radar, lidar, GPS, and cameras, which help these vehicles understand their environment and make decisions.












































![[DSC Europe 25] Velibor Ilic - Autonomous Driving - How AI Shapes Technical ...](https://cdn.slidesharecdn.com/ss_thumbnails/gwu9aqths9ovngsrhidc-3-velibor-ilic-autonomous-driving-how-ai-shapes-technical-challenges-251219150035-7436923a-thumbnail.jpg?width=640&height=640&fit=bounds)





























