Downloaded 649 times






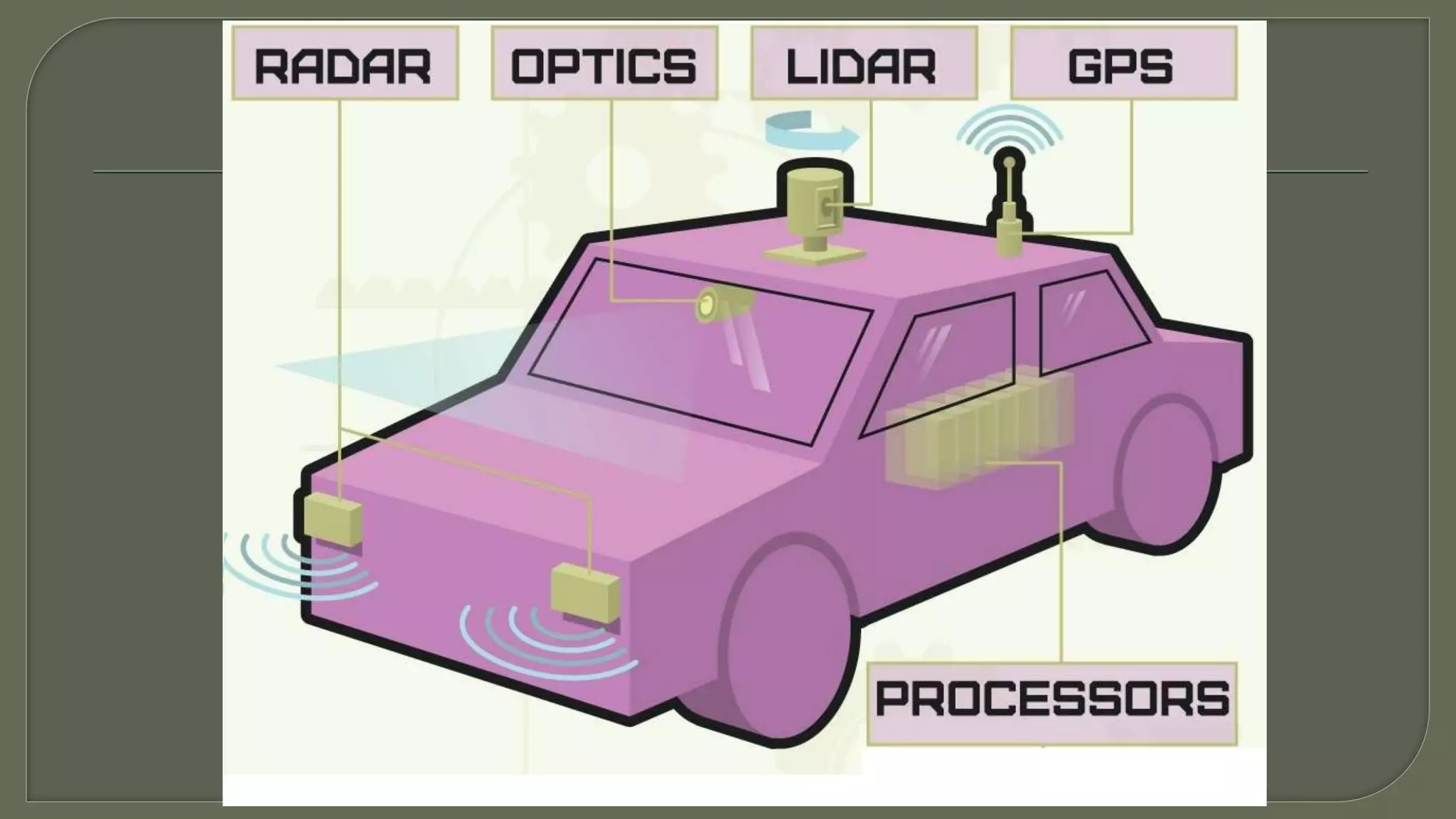




















The document discusses the development and technology behind self-driving cars, focusing on their hardware components and operation. Key technologies include lidar, radar, cameras, GPS, and the use of artificial intelligence to navigate and ensure safety. The document also highlights the potential benefits and challenges of autonomous vehicles, alongside predictions for their market release by various automakers by 2020.