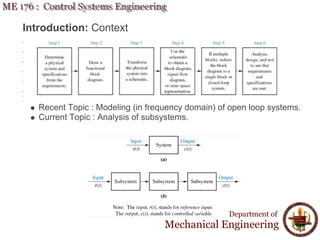
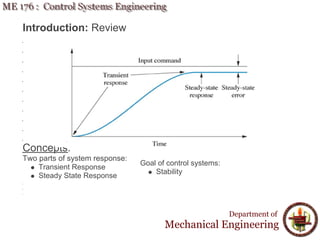
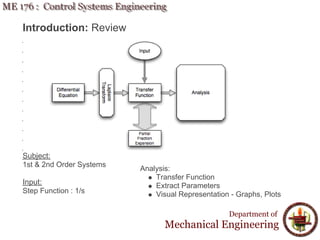
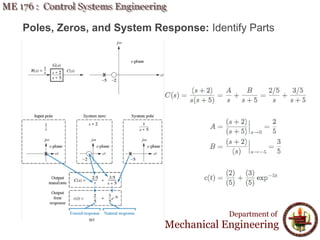
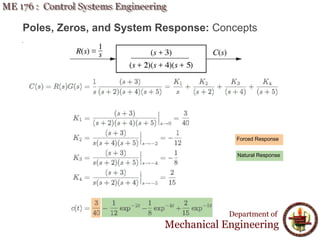
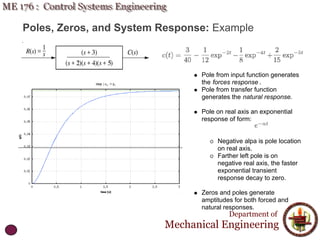
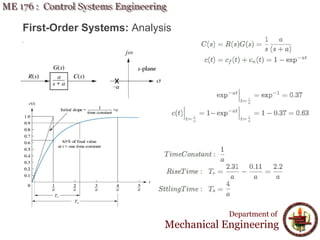
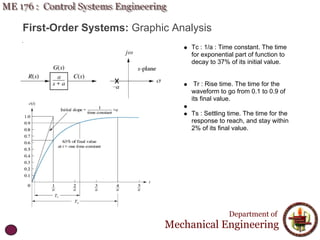
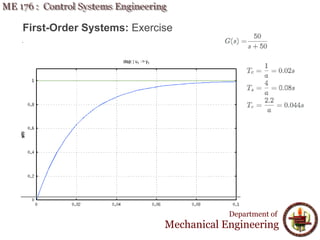
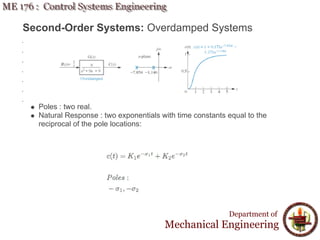
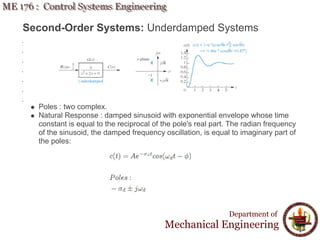
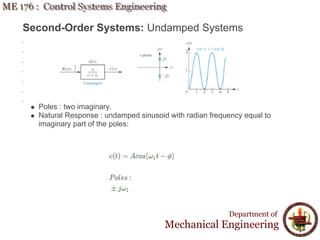
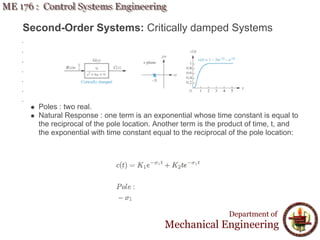
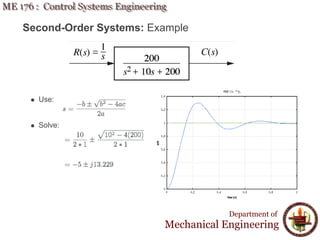
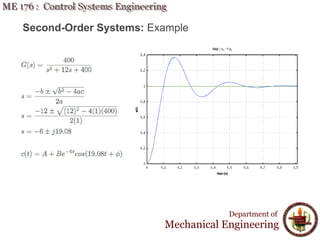
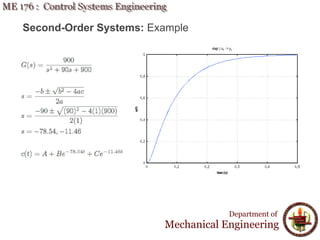
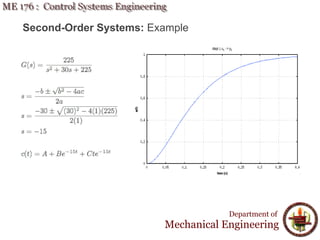
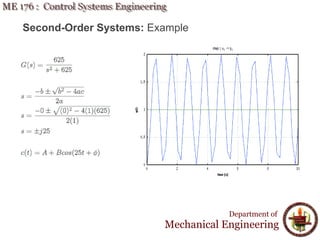
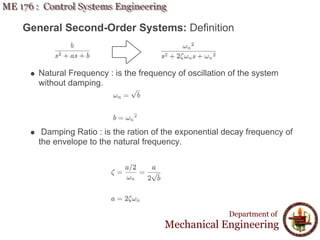
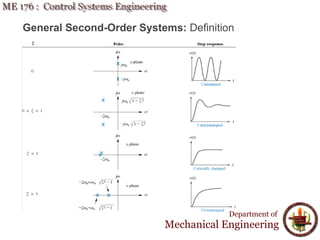
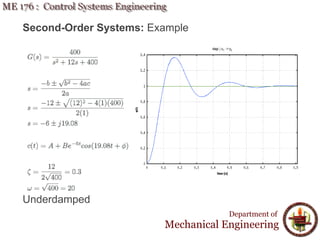
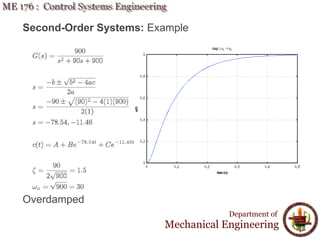
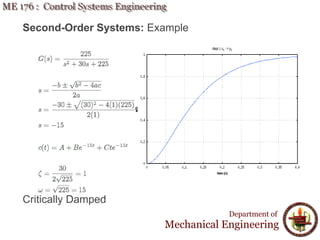
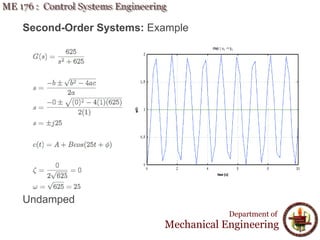
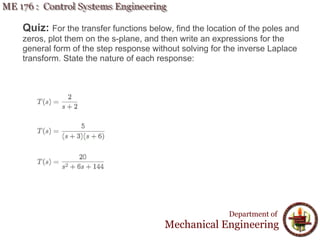

This document discusses time response analysis of control systems. It covers topics such as first-order and second-order systems, including their poles, zeros, and responses. For first-order systems, it describes concepts like time constant, rise time, and settling time. It then covers different types of responses for second-order systems, including overdamped, underdamped, undamped, and critically damped. Examples are provided to illustrate these concepts and analyze systems from their transfer functions.





















































![Circuit Network Analysis - [Chapter5] Transfer function, frequency response, ...](https://cdn.slidesharecdn.com/ss_thumbnails/ch5-150613063859-lva1-app6891-thumbnail.jpg?width=640&height=640&fit=bounds)