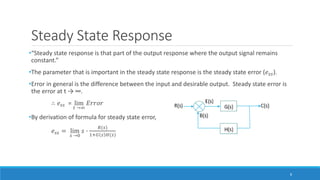
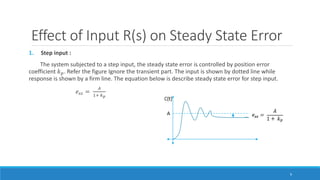
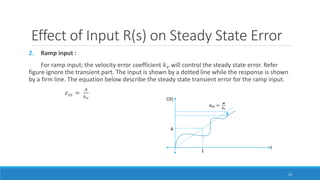
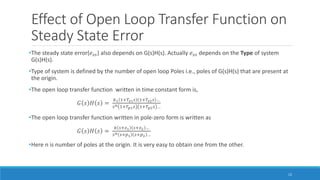
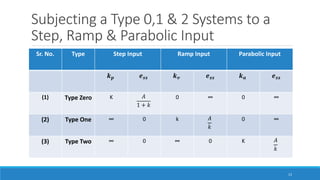
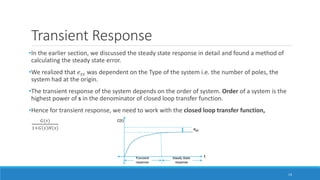
The document discusses time response analysis in control systems, focusing on how different input types (impulse, step, ramp, parabolic, and sinusoidal) affect output responses. It explains the concept of steady state response and steady state error, detailing how these are influenced by the type of system and the input applied. Additionally, the document covers transient response and specifications such as delay time, rise time, peak time, and overshoot.


![Inputs Supplied to a System
1. Impulse input :
Impulse represents a sudden change in input. An Impulse is infinite at t = 0 and zero
everywhere else. The area under the curve is 1. A unit impulse has magnitude 1 at t = 0.
r(t) = δ(t) = 1 t = 0
= 0 t ≠ 0
In the Laplace domain we have
L[r(t)] = L[δ(t)] = 1
Impulse inputs are used to derived a mathematical model of the system.
3](https://image.slidesharecdn.com/timeresponseanalysis-170701153514/85/Time-response-analysis-3-320.jpg)
![Inputs Supplied to a System
2. Step input :
A step input represents a constant command such as position. The input given to an elevator
is step input. Another example of a step input is setting the temperature of an air
conditioner.
A step signal is given by the formula,
r(t) = u(t) = A t ≥ 0
= 0 otherwise , If A = 1, it is called step.
In Laplace domain, we have
L[r(t)] = R(s) =
𝐴
𝑠
In case of a unit step, we get L [ r(t)] = R(s) =
1
𝑠
4](https://image.slidesharecdn.com/timeresponseanalysis-170701153514/85/Time-response-analysis-4-320.jpg)
![Inputs Supplied to a System
3. Ramp input :
The ramp input represents a linearly increasing input command. It is given by the formula,
r(t) = At t ≥ 0 ; Here A is the slope.
= 0 t < 0
If A = 1, it is called a unit ramp.
In the Laplace domain we have,
L [r(t)] = R(s) =
𝐴
𝑠2
In case of unit ramp, we have R(s) =
1
𝑠2
System are subjected to Ramp inputs when we need to study the system behavior for linear
increasing functions like velocity.
5](https://image.slidesharecdn.com/timeresponseanalysis-170701153514/85/Time-response-analysis-5-320.jpg)
![Inputs Supplied to a System
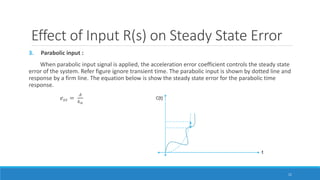
4. Parabolic input :
Rate of change of velocity is acceleration. Acceleration is a parabolic function. It is given by
the formula,
r(t) =
𝐴𝑡2
2
t ≥ 0
= 0 t < 0
If A = 1, it is called a unit parabola. In the Laplace domain we have
L [r(t)] = R(s) =
𝐴
𝑠3
In case of unit parabola, we have R(s) =
1
𝑠3
6](https://image.slidesharecdn.com/timeresponseanalysis-170701153514/85/Time-response-analysis-6-320.jpg)