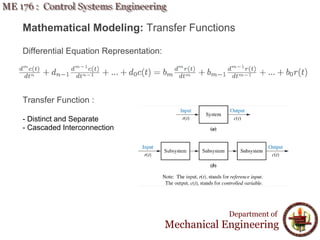
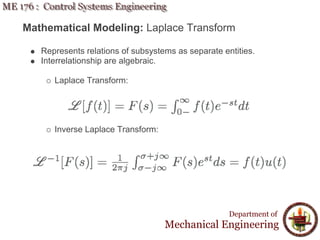
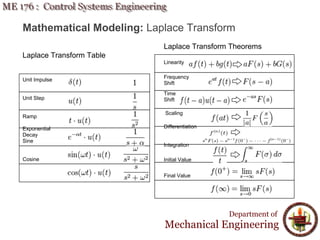
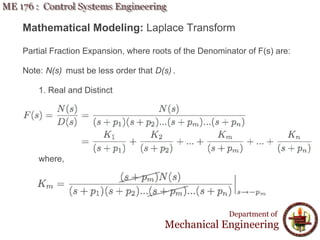
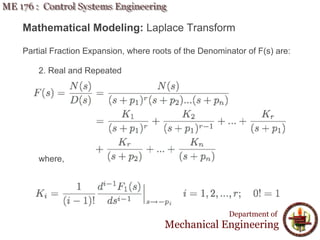
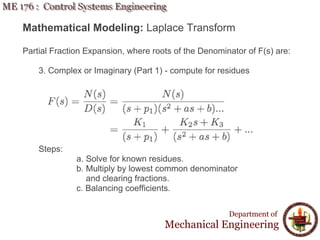
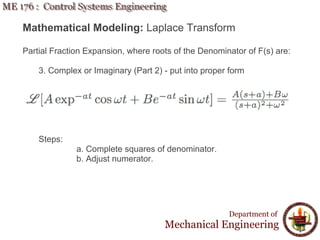
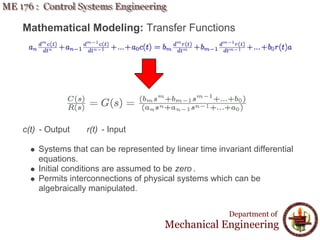
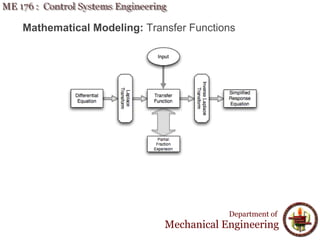

This document discusses mathematical modeling for control systems engineering. It introduces mathematical models as simplified representations of physical systems using assumptions. There are two common types of mathematical models: transfer functions in the frequency domain and state equations in the time domain. The document outlines steps for creating mathematical models using laws of physics and engineering, and describes various modeling techniques including transfer functions, Laplace transforms, and partial fraction expansions. It emphasizes that mathematical modeling permits representing physical systems as separate entities that can be algebraically manipulated.