Download to read offline








![Introduction
The aim of this work is to study a particular type of miniature synchronous motor. Conventional syn-
chronous motors are characterized by the property that under working conditions the rotor exhibits a
stable rotation, the frequency being that of the power supply (hence the term ”synchronous”). In or-
der to enter the working conditions after switching on the motor, different techniques are suggested in
electrical engineering. Some of these techniques (such as pony motors, induction cages or electronic con-
trols) are rather complicated. Hence in many papers the transient behaviour upon start and the state
of synchronous rotation are treated separately. By contrast, the type of motor considered here features
a simple mechanism which permits a satisfactory physical modelling covering the entire process. This
model has been used by the manufacturer [12] for numerical studies and was presented in a colloquium
talk in the nineteen 80’s. It is represented by the following non–linear time–periodic system of ordinary
differential equations
d2
dτ2
ϑ = −
λ
J
i2
1 + i2
2 sin(ϕ) − ˜̺
d
dτ
ϑ − ˜m
U0 sin(ωτ) = R i1 + L
d
dτ
i1 + λ
d
dτ
sin(ϑ)
U0 sin(ωτ) = R i2 + L
d
dτ
i2 + λ
d
dτ
cos(ϑ) + u
d
dτ
u = i2/C.
(1)
The quantity ϑ is the angle of the rotor with respect to a fixed axis, i1 i2 correspond to the currents in
two parallel circuits and u describes the voltage of a condenser attached to the second power circuit.
Our approach for a mathematical treatise is based on perturbation theory. After some preliminary
transformations and assumptions on the parameters, the system turns out to be a special case of the
following problem
( ˙q, ˙p) = J∇H(q, p) + F(q, p, η, t, ε)
˙η = A η + G(q, p, t, ε).
(1.1)
This generalized problem consists of a one–degree of freedom Hamiltonian system (corresponding to the
mathematical pendulum in the above set of equations) and a linear system, the two being coupled by
small periodic perturbations. As this system is of interest by itself, we introduce a general framework
which might be of use elsewhere, too. The hypotheses we make reflect some of the features of the original
physical problem, however. As to the Hamiltonian system these assumptions include the existence of an
elliptic fixed point at the origin satisfying a non–resonance condition, as well as the existence of domains
foliated by periodic solutions (such as the oscillatory and rotatory solutions of the pendulum equation).
The matrix A is assumed to be exponentially asymptotically stable and the Fourier series with respect
to time t of the 2 π–periodic perturbations F and G are assumed to be finite.
v](https://image.slidesharecdn.com/134355b9-c3ce-41ca-8cf9-85f751f98ea6-160201091932/85/Invariant-Manifolds-Passage-through-Resonance-Stability-and-a-Computer-Assisted-Application-to-a-Synchronous-Motor-9-320.jpg)
![vi Introduction
The original physical problem suggests two main questions. The discussion of the state of synchronous
rotation which is related to the existence and stability of a periodic solution near (q, p, η) = 0 and hence
is local in nature. On the other hand, solutions describing the transition from start to stationary rotation
are of upmost interest. They require a more global treatment. In a first part of this work a number of
key results for systems of type (1.1) are derived which prove to be a tool kit for concrete applications. In
a second part these results are applied to the miniature synchronous motor.
The first part is split into three self–contained chapters. In chapter 1 it is shown that the fixed point
(q, p, η) = 0 of the unperturbed system generates a unique 2 π–periodic solution. A discussion of its
stability is postponed until chapter 3. A time–dependant shift of the coordinates first yields a problem
which is again of type (1.1), i.e.
( ˙ˇQ, ˙ˇP) = J∇H( ˇQ, ˇP) + ˇF( ˇQ, ˇP, H, t, ε)
˙H = A H + ˇG( ˇQ, ˇP, t, ε),
(1.16)
but satisfies ˇF(0, 0, 0, t, ε) = 0 and ˇG(0, 0, t, ε) = 0. For ε = 0, the ( ˇQ, ˇP)–plane H = 0 corresponds to
the center manifold of the origin, whereas the H–axis ( ˇQ, ˇP) = (0, 0) represents the stable manifold. For
ε = 0 sufficiently small we establish the existence of an integral manifold ( ˇQ, ˇP) = V(t, H, ε), the so–called
strongly stable manifold. This is achieved by adapting a result of Kelley [8] to our situation. Applying
the transformation ( ˇQ, ˇP) = (Q, P) + V(t, H, ε) then yields a system of the form
( ˙Q, ˙P) = J∇H(Q, P) + ˆF(Q, P, H, t, ε)
˙H = A H + ˆG(Q, P, H, t, ε),
(1.87)
where in particular ˆF vanishes on the new H–axis, i.e.
ˆF(0, 0, H, t, ε) = 0 ˆG(0, 0, 0, t, ε) = 0. (1.88)
In a next step we replace (Q, P) by action–angle coordinates (ϕ, h) ∈ R2
. The transformed system is
equivalent to (1.87) if we restrict (Q, P) to regions of periodic solutions of ( ˙Q, ˙P) = J∇H(Q, P). In view
of (1.88) such a region may be a neighbourhood of the fixed point (Q, P, H) = (0, 0, 0) as well. In this
case, the set (h, H) = (0, 0) corresponds to (Q, P, H) = (0, 0, 0) and is invariant. The stability discussion
of (h, H) = (0, 0) therefore yields information on the stability of (Q, P, H) = (0, 0, 0) which eventually
corresponds to synchronous rotation in the case of our model of a synchronous motor. In action–angle
coordinates the system is of the form
˙ϕ = ω(h) + f(t, ϕ, h, H, ε)
˙h = g(t, ϕ, h, H, ε)
˙H = A H + h(t, ϕ, h, H, ε)
(1.110)
where A still denotes the matrix introduced in (1.1) and f, g, h vanish for ε = 0. The unperturbed
problem corresponding to (1.110) suggests the existence of an attractive invariant manifold near H = 0.
The majority of results on the existence of such manifolds (see e.g. Fenichel [4], Hirsch, Pugh, Shub
[6]) are based on a discussion of Lyapunov type numbers of solutions. For the purpose of this work
an approach based on more easily accessible quantities is more convenient, see Kirchgraber [9]. In this
work we apply an adaption by Nipp/Stoffer [13] where the assumptions are expressed in terms of the
vector field. It is here where the introduction of action–angle coordinates turns out to be advantageous.
The attractive invariant manifold we establish admits the representation H = S(t, ϕ, h, ε) with S = 0
for ε = 0. Since all solutions of (1.110) approach the invariant manifold, the discussion then reduces to
the reduced system, i.e. the restriction of eq. (1.110) to the attractive invariant manifold. This reduced
system is two–dimensional but non-autonomous. It is represented in two different forms, either of which
will be used in chapter 2 and chapter 3, respectively.](https://image.slidesharecdn.com/134355b9-c3ce-41ca-8cf9-85f751f98ea6-160201091932/85/Invariant-Manifolds-Passage-through-Resonance-Stability-and-a-Computer-Assisted-Application-to-a-Synchronous-Motor-10-320.jpg)
![Introduction vii
The first representation of the reduced system given in chapter 1 is used for the global discussion. Taking
into account some additional properties of the original physical problem, chapter 2 deals with a system
of the form
˙ϕ = ω(h) +
3
j=2
εj
k,n∈Z
fj
k,n(h) ei(kϕ+nt)
+ ε4
f4
(t, ϕ, h, ε)
˙h =
3
j=2
εj
k,n∈Z
gj
k,n(h) ei(kϕ+nt)
+ ε4
g4
(t, ϕ, h, ε)
(2.1)
defined for ϕ, h ∈ R. Given km, nm ∈ Z and hm ∈ R such that gj
km,nm
= 0 (j ∈ {2, 3}) and km ω(hm) +
nm = 0 the value hm is called a resonance. We assume that the set of resonances hm is finite. Moreover,
for every resonance hm we require that d
dh ω(hm) = 0 holds. In order to obtain information on the
qualitative behaviour of (2.1) averaging techniques are applied. More precisely we apply time–dependant
near–identity transformations of the form ¯h = h + O(ε2
). This change of coordinates is defined in a
standard way, see Kirchgraber [11] or Sanders/Verhulst [17]. We use it in a somewhat different way,
however. As the transformation is singular in every resonance, it is applied outside a neighbourhood of
the resonances. In order to keep the higher order terms small, the size of the neighbourhood of each
resonance must be chosen appropriately. We show that the neighbourhoods omitted may be chosen to be
O(ε)–small. More precisely, for fixed δ > 0 and choosing |ε| < εO
(δ) the transformation may be applied
outside |ε|
δ –neighbourhoods of the resonances. In this outer region the transformed system then takes the
form
˙ϕ = ω(¯h) + O(ε)
˙¯h = ε2
g2
0,0(¯h) + ε2
δ2
¯g2
(t, ϕ, ¯h, ε, δ) + O(ε3
).
(2.23)
where ¯g2
is still bounded. If on a subset of the outer region the map g2
0,0 is bounded from below, the
parameters δ and |ε| < εO
(δ) may be chosen such that ˙¯h > 0 and thus all solutions leave this subset.
Away from zeroes of g2
0,0 the qualitative behaviour is therefore determined simply by the sign of g2
0,0.
In the inner region, i.e. if h satisfies |h − hm| < 4 |ε|
δ , a different near–identity change of coordinates is
defined. The resulting system then reads as follows
˙ϕ = ω(¯h) + O(ε2
)
˙¯h = ε2
g2
0,0(¯h) + ε2
l∈N∗
g2
lkm,lnm
(¯h) eil(kmϕ+nmt)
+ O(ε3
). (2.25)
Introducing the inner variables
ε ˜h := const ¯h − hm ∀ ¯h − hm < 4
|ε|
δ
ψ := km ϕ + nm t,
(2.28)
and taking into account again some special features which arise in the application of the synchronous
motor, the system takes the form of a km 2 π–periodically perturbed pendulum with external torque,
i.e. it is given by
˙ψ = ε ˜h + ε2 ˜f2
(t, ψ, ˜h, ε)
˙˜h = ε (a0 + ac
1 cos(ψ) + as
1 sin(ψ)) + ε2
˜g2
(t, ψ, ˜h, ε).
(2.29)
The quantities a0, ac
1 and as
1 are determined by the Fourier coefficients g2
0,0 and g2
km,nm
evaluated at
h = hm.](https://image.slidesharecdn.com/134355b9-c3ce-41ca-8cf9-85f751f98ea6-160201091932/85/Invariant-Manifolds-Passage-through-Resonance-Stability-and-a-Computer-Assisted-Application-to-a-Synchronous-Motor-11-320.jpg)

![Introduction ix
In the second part, chapter 4, we present the application of part one to the model of a miniature
synchronous motor mentioned before. After some preliminary preparations eq. (1) is transformed into
˙q = p
˙p = −
a
2
2
sin(q) + ε (η1 cos(q + t) − η2 sin(q + t)) − ε2
̺ p − ε2
(m + ̺)
˙η1 = −η1 + ε sin(q + t)
˙η2 = −η2 − 2 η3 + ε cos(q + t)
˙η3 = η2 − ε cos(q + t).
(4.14)
The quantity a is rougly equal to λ
R . For fixed a the perturbation parameter ε is given by a λ
U0
.
Here we assume that the voltage U0 of the power supply and the moment of inertia J of the motor are
proportional. Thus, ε tends to 0 provided U0 (and thus J) increases, while the magnetic dipol λ, and the
resistance R are kept fixed. By consequence, the effect of induction generated by the rotating permanent
magnet and exerted on the coils decreases as ε → 0.
In order to obtain preliminary insight into the features of (4.14) we present the results of various nu-
merical simulations carried out with the help of the package dstool [3]. The results found confirm the
analytical discussion given later in this chapter. In addition, they demonstrate that the behaviour in a
neighbourhood of the separatrix of the unperturbed problem of (4.14) is of no particular interest if a is
large. (Since the techniques introduced in part one rely on regions of periodic solutions of the Hamiltonian
system, the neighbourhood of a separatrix is not covered by our analytical approach.)
The main task in chapter 4 is to apply the tools of part one to system (4.14) and to compute the key
quantities g2
0,0(h), g2
km,nm
(h) and g,1
0,0(ε). Among other things this amounts to explicitely construct
suitable approximations of the invariant manifolds introduced in chapter 1. The introduction of action–
angle coordinates associated with the pendulum equation, is based on Fourier series of Jacobian elliptic
functions. Eventually g2
0,0(h) and g2
km,nm
(h) are represented with the help of convolutions of Fourier
series. The complexity of this procedure requires the use of a software package for symbolic and numerical
computations. The author has chosen the Maple [15] software package. Its synthax is simple and legible
for readers with basic knowledge in programming. Hence the source code listed is comprehensible to a
growing community. For various choices of the parameters the dynamics of the model is discussed in terms
of the physical behaviour of the motor. The influence of a mechanical friction (given by the parameter
˜̺) and an external torque ( ˜m) is considered as well. Both situations considered in chapter 2, i.e. the
case of passage of all solutions up to an O(ε)–set as well as the passage of strictly all solutions through
resonances are established. The periodic solution near the origin, corresponding to the synchronous
rotation of the shaft, is shown to be stable for all choices of the parameters. Moreover additional results
are established: the possibility of asynchronous rotations, the modulation of the synchronous rotation
state by a second harmonic as well as a synchronous rotation with large variation of the angular speed
(caused by a capture into resonance). The overall conclusion is that for sufficiently large a the motor
behaves favouritely, i.e. enters the state of stable synchronous rotation when switched on.
Chapter 4 closes with a result on the separatrix region for sufficiently small values of the parameter
a. In this situation, the existence of a global attractive invariant manifold of (4.14) is established. The
corresponding reduced system then is of periodically perturbed pendulum type. Although an approximate
representation of the reduced system is not available, the construction of an approximate Melnikov
function is feasible. The numerical evaluation of the corresponding formula then confirms the results
found by numerical simulation. More precisely, it is established that solutions starting with a frequency
larger than the frequency of the power supply may either enter the state of synchronous rotation or the
frequency may eventually tend to zero.](https://image.slidesharecdn.com/134355b9-c3ce-41ca-8cf9-85f751f98ea6-160201091932/85/Invariant-Manifolds-Passage-through-Resonance-Stability-and-a-Computer-Assisted-Application-to-a-Synchronous-Motor-13-320.jpg)






![1.2. The Periodic Solution 7
1.2.2 The Transformation into the Periodic Solution
The purpose of this section is to transform the coordinates of system (1.1) in a way, such that the origin
becomes a fixed point. This may be done by performing a (time–dependent) translation into the periodic
solution (ˇq, ˇp, ˇη).
More precisely we will use the Taylor / Fourier expansions (1.3), (1.4) assumed in GA 1.3 to explicitely
calculate a similar representation of the corresponding vector field in the new coordinates. This will be
prepared in the following lemma:
Lemma 1.2.3 Consider a linear inhomogenous differential equation on R2+d
of the following type
˙x = B x +
|n|≤N
bneint
, (1.13)
where bn ∈ C2+d
for every |n| ≤ N, bn = b−n and σ (B)∩i Z = ∅. Then there exists a unique 2π–periodic
solution given by
x(t) =
|n|≤N
[i n IC 2+d − B]−1
bn eint
. (1.14)
PROOF: Note first that since σ (B) ∩i Z = ∅, the inverse of the matrix i n IC 2+d − B exists. It is evident
that the function x presented in (1.14) is 2π–periodic with respect to t. Moreover
˙x(t) − B x(t) =
|n|≤N
i n [i n IC 2+d − B]
−1
bn eint
− B
|n|≤N
[i n IC 2+d − B]
−1
bn eint
=
|n|≤N
[i n IC 2+d − B] [i n IC 2+d − B]
−1
bn eint
=
|n|≤N
bn eint
,
such that x is a solution of (1.13), indeed.
Consider any further 2π–periodic solution y of (1.13). Writing its Fourier expansion y =
n∈N
cn eint
and
calculating ˙y−B y one then compares the result with
|n|≤N
bn eint
which implies cn = [i n IC 2+d − B]
−1
bn
and thus x = y. Hence x is unique as claimed.
We now are in the position to prove the main result of this section.
Proposition 1.2.4 Let (ˇq, ˇp, ˇη) denote the 2π–periodic solution of system (1.1) for |ε| < ε1, asserted in
lemma 1.2.2 and perform the following change of coordinates in the (q, p, η, t, ε)–space:
(q, p, η, t, ε) = ((ˇq, ˇp, ˇη)(t, ε), 0, 0) + ( ˇQ, ˇP, H, t, ε), (1.15)](https://image.slidesharecdn.com/134355b9-c3ce-41ca-8cf9-85f751f98ea6-160201091932/85/Invariant-Manifolds-Passage-through-Resonance-Stability-and-a-Computer-Assisted-Application-to-a-Synchronous-Motor-21-320.jpg)
![8 Chapter 1. Reduction to a Planar System
where2
( ˇQ, ˇP) ∈ R2
, H ∈ Rd
, t ∈ R and |ε| < ε1. Then (1.1) transforms into the system
( ˙ˇQ, ˙ˇP) = J∇H( ˇQ, ˇP) + ˇF( ˇQ, ˇP, H, t, ε)
˙H = A H + ˇG( ˇQ, ˇP, t, ε),
(1.16)
where the following statements hold :
• The mappings ˇF and ˇG are of class Cω
, vanish at the origin ( ˇQ, ˇP, H) = 0 and admit the repre-
sentation3
ˇF( ˇQ, ˇP, H, t, ε) =
3
j=1
εj ˇFj
( ˇQ, ˇP, H, t) + ε4 ˇF4
( ˇQ, ˇP, H, t, ε)
ˇG( ˇQ, ˇP, t, ε) =
3
j=1
εj ˇGj
( ˇQ, ˇP, t) + ε4 ˇG4
( ˇQ, ˇP, t, ε)
(1.17)
where ˇFj
and ˇGj
, (j = 1, . . . , 4) are 2π–periodic with respect to t.
• The map H → ˇF( ˇQ, ˇP, H, t, ε) is affine.
• The mappings ˇF1
, ˇF2
, ˇG1
and ˇG2
may be expressed in terms of the original vector field of system
(1.1):
ˇF1
( ˇQ, ˇP, H, t) = F1
( ˇQ, ˇP, H, t) −
|n|≤N
∆(n, ˇQ, ˇP) F1
n(0, 0, 0) eint
ˇF2
( ˇQ, ˇP, H, t) = F2
( ˇQ, ˇP, H, t) −
|n|≤N
∆(n, ˇQ, ˇP) F2
n(0, 0, 0)eint
+
|n|,|¯n|≤N
1
2 JD3
H( ˇQ, ˇP) α1,1
n,1, α1,1
¯n,1
+ ∂(q,p)F1
n( ˇQ, ˇP, H) − ∆(n + ¯n, ˇQ, ˇP) ∂(q,p)F1
n (0, 0, 0) α1,1
¯n,1
+ ∂ηF1
n( ˇQ, ˇP, H) − ∆(n + ¯n, ˇQ, ˇP) ∂ηF1
n(0, 0, 0) α1,1
¯n,2 ei(n+˜n)t
ˇG1
( ˇQ, ˇP, t) = G1
( ˇQ, ˇP, t) − G1
(0, 0, t)
ˇG2
( ˇQ, ˇP, t) = G2
( ˇQ, ˇP, t) − G2
(0, 0, t) +
|n|,|¯n|≤N
∂(q,p)G1
n( ˇQ, ˇP) − ∂(q,p)G1
n(0, 0) α1,1
¯n,1
(1.18)
where
∆(n, ˇQ, ˇP) := [i n IC 2 − JD2
H( ˇQ, ˇP)] i n IC 2 − JD2
H(0, 0)
−1
α1,1
n,1 = i n IC 2 − JD2
H(0, 0)
−1
F1
n(0, 0, 0)
α1,1
n,2 = [i n IC d − A]
−1
G1
n(0, 0).
(1.19)
2The letter H must be read as ”upper eta”
3for the application in chapter 4 it suffices to consider the expansions including terms of order O(ε2) of ˇF and of order
O(ε) of ˇG. The formulae for O(ε3)–terms are provided in order to enable a more detailed discussion on the capture in
resonance, cf. section 2.3.5.](https://image.slidesharecdn.com/134355b9-c3ce-41ca-8cf9-85f751f98ea6-160201091932/85/Invariant-Manifolds-Passage-through-Resonance-Stability-and-a-Computer-Assisted-Application-to-a-Synchronous-Motor-22-320.jpg)
![1.2. The Periodic Solution 9
• Moreover, ˇF1
, ˇF2
, ˇG1
and ˇG2
may be represented as Fourier polynomials in t, similar to the
representation (1.4), i.e.
ˇFj
( ˇQ, ˇP, H, t) =
|n|≤jN
ˇFj
n( ˇQ, ˇP, H, t) eint ˇGj
( ˇQ, ˇP, t) =
|n|≤jN
ˇGj
n( ˇQ, ˇP, t) eint
(1.20)
• The values of the map ˇF3
may be expressed in an analogous way:
ˇF3
( ˇQ, ˇP, H, t) =F3
( ˇQ, ˇP, H, t) −
|n|≤N
∆(n, ˇQ, ˇP) F3
n(0, 0, 0)eint
+
|n|,|¯n|≤N
JD3
H( ˇQ, ˇP) α1,1
n,1, α2,1
¯n,1
+ ∂(q,p)F2
n( ˇQ, ˇP, H) − ∆(n + ¯n, ˇQ, ˇP) ∂(q,p)F2
n(0, 0, 0) α1,1
¯n,1
+ ∂ηF2
n( ˇQ, ˇP, H) − ∆(n + ¯n, ˇQ, ˇP) ∂ηF2
n(0, 0, 0) α1,1
¯n,1
+ ∂(q,p)F1
n( ˇQ, ˇP, H) − ∆(n + ¯n, ˇQ, ˇP) ∂(q,p)F1
n(0, 0, 0) α2,1
¯n,1
+ ∂ηF1
n( ˇQ, ˇP, H) − ∆(n + ¯n, ˇQ, ˇP) ∂ηF1
n(0, 0, 0) α2,1
¯n,1 ei(n+¯n)t
+
|n|,|¯n|,|˜n|≤N
JD3
H( ˇQ, ˇP) α1,1
n,1, α2,2
¯n,˜n,1
+ 1
6 JD4
H( ˇQ, ˇP) − ∆(n + ¯n + ˜n, ˇQ, ˇP) JD4
H(0) α1,1
n,1 α1,1
¯n,1 α1,1
˜n,1
+ 1
2 ∂2
(q,p)F1
n( ˇQ, ˇP, H) − ∆(n + ¯n + ˜n, ˇQ, ˇP) ∂2
(q,p)F1
n(0, 0, 0) α1,1
¯n,1, α1,1
˜n,1
+ 1
2 ∂η∂(q,p)F1
n( ˇQ, ˇP, H) − ∆(n + ¯n + ˜n, ˇQ, ˇP) ∂η∂(q,p)F1
n(0, 0, 0) α1,1
˜n,1, α1,1
¯n,2
+ 1
2 ∂(q,p)∂ηF1
n( ˇQ, ˇP, H) − ∆(n + ¯n + ˜n, ˇQ, ˇP) ∂(q,p)∂ηF1
n(0, 0, 0) α1,1
˜n,2, α1,1
¯n,1
+ ∂(q,p)F1
n( ˇQ, ˇP, H) − ∆(n + ¯n, ˇQ, ˇP) ∂(q,p)F1
n (0, 0, 0) α2,2
¯n,˜n,1
+ ∂ηF1
n( ˇQ, ˇP, H) − ∆(n + ¯n, ˇQ, ˇP) ∂ηF1
n(0, 0, 0) α2,2
¯n,˜n,1 ei(n+¯n+˜n)t
.
(1.21)
where in addition
α2,1
n,1 = i n IC 2 − JD2
H(0, 0)
−1
F2
n(0, 0, 0) α2,1
n,2 = [i n IC d − A]
−1
G2
n(0, 0)
α2,2
n,¯n,1 = i (n + ¯n) IC 2 − JD2
H(0, 0)
−1
∂(q,p)F1
n(0, 0, 0) α1,1
n,1 + ∂ηF1
n(0, 0, 0) α1,1
n,2 .
PROOF: In order to simplify the notation, we use the same abbreviations as introduced in the proof of
lemma 1.2.2:
x := (q, p, η) ˇx(t, ε) :=(ˇq, ˇp, ˇη)(t, ε) y := ( ˇQ, ˇP, H)
f(x) :=
J∇H(q, p)
A η
g(x, t, ε) :=
F(q, p, η, t, ε)
G(q, p, t, ε)
(1.22)
such that system (1.1) defined for x ∈ R2+d
reads
˙x = f(x) + g(x, t, ε). (1.23)](https://image.slidesharecdn.com/134355b9-c3ce-41ca-8cf9-85f751f98ea6-160201091932/85/Invariant-Manifolds-Passage-through-Resonance-Stability-and-a-Computer-Assisted-Application-to-a-Synchronous-Motor-23-320.jpg)

![1.2. The Periodic Solution 11
1. Consider the Taylor expansion of ˜f at ε = 0, i.e. the representation
˜f(y, t, ε) = ˜f(y, t, 0) + ε ∂ε
˜f(y, t, 0) + 1
2 ε2
∂2
ε
˜f(y, t, 0) + 1
6 ε3
∂3
ε
˜f(y, t, 0) + ε4 ˜f4
(y, t, ε) (1.29)
where ˜f4
(y, t, ε) is of class Cω
(R2+d
× R × (−ε1, ε1), R2+d
) and 2π–periodic with respect to t.
Setting
ˇFj
( ˇQ, ˇP, H, t)
ˇGj
( ˇQ, ˇP, t)
:= 1
j! ∂j
ε
˜f(y, t, 0) j = 1, 2, 3
ˇF4
( ˇQ, ˇP, H, t, ε)
ˇG4
( ˇQ, ˇP, t, ε)
:= ˜f4
(y, t, ε),
(1.30)
and taking into account that (1.26), (1.28) imply
ˇF(0, 0, 0, t, ε)
ˇG(0, 0, t, ε)
= −f(0) = 0
we find the first statement claimed to be proved at once.
2. In order to prove the second statement we note that by (1.28), (1.30)
ˇF( ˇQ, ˇP, H, t, ε) = J ∇H(ˇq + ˇQ, ˇp + ˇP) − J ∇H( ˇQ, ˇP) − J∇H(ˇq, ˇp)
+ F(ˇq + ˇQ, ˇp + ˇP, ˇη + H, t, ε) − F(ˇq, ˇp, ˇη, t, ε)
such that the affinity of F assumed in GA 1.4 implies the affinity of ˇF ( with respect to H).
3. We determine the Taylor coefficients in (1.29).
Using (1.26) we have
∂j
ε
˜f(0, t, 0) = 0 j = 1, 2, 3. (1.31)
On the other hand, from definition (1.25) we derive
∂ε
˜f(y, t, ε) = Df(ˇx(t, ε) + y) ∂ε ˇx(t, ε) + ∂xg(ˇx(t, ε) + y, t, ε) ∂εˇx(t, ε)
+ ∂εg(ˇx(t, ε) + y, t, ε) − ∂ε ˙ˇx(t, ε),
(1.32)
∂2
ε
˜f(y, t, ε) = D2
f(ˇx(t, ε) + y) ∂εˇx(t, ε)[2]
+ Df(ˇx(t, ε) + y) ∂2
ε ˇx(t, ε)
+ ∂2
xg(ˇx(t, ε) + y, t, ε) ∂εˇx(t, ε)[2]
+ ∂xg(ˇx(t, ε) + y, t, ε) ∂2
ε ˇx(t, ε)
+ 2 ∂ε∂xg(ˇx(t, ε) + y, t, ε) ∂εˇx(t, ε) + ∂2
ε g(ˇx(t, ε) + y, t, ε)
− ∂2
ε
˙ˇx(t, ε)
(1.33)
∂3
ε
˜f(y, t, ε) = D3
f(ˇx(t, ε) + y) ∂ε ˇx(t, ε)[3]
+ 3 D2
f(ˇx(t, ε) + y) (∂ε ˇx(t, ε), ∂2
ε ˇx(t, ε)) + Df(ˇx(t, ε) + y) ∂3
ε ˇx(t, ε)
+ ∂3
xg(ˇx(t, ε) + y, t, ε) ∂εˇx(t, ε)[3]
+ 3 ∂2
xg(ˇx(t, ε) + y, t, ε) (∂εˇx(t, ε), ∂2
ε ˇx(t, ε)) + ∂xg(ˇx(t, ε) + y, t, ε) ∂3
ε ˇx(t, ε)
+ 3 ∂ε∂2
xg(ˇx(t, ε) + y, t, ε) ∂εˇx(t, ε)[2]
+ 3 ∂2
ε ∂xg(ˇx(t, ε) + y, t, ε) ∂ε ˇx(t, ε)
+ 3 ∂ε∂xg(ˇx(t, ε) + y, t, ε) ∂2
ε ˇx(t, ε) + ∂3
ε g(ˇx(t, ε) + y, t, ε)
− ∂3
ε
˙ˇx(t, ε)
(1.34)](https://image.slidesharecdn.com/134355b9-c3ce-41ca-8cf9-85f751f98ea6-160201091932/85/Invariant-Manifolds-Passage-through-Resonance-Stability-and-a-Computer-Assisted-Application-to-a-Synchronous-Motor-25-320.jpg)
![12 Chapter 1. Reduction to a Planar System
where the notation v[j]
must be understood as applying the corresponding multilinear–form on the
j vectors (v, . . . , v). Taking into account that by (1.24)
∂j
xg(y, t, 0) = 0 j = 1, 2, 3 ∂ε∂j
xg(y, t, 0) = ∂j
xg1
(y, t) j = 0, 1, 2
∂2
ε ∂j
xg(y, t, 0) = 2 ∂j
xg2
(y, t) j = 0, 1 ∂3
ε g(y, t, 0) = 6 g3
(y, t),
we therefore see that setting ε = 0, (1.32), (1.33) and (1.34) reduce to
∂ε
˜f(y, t, 0) = Df(y) ∂ε ˇx(t, 0) + g1
(y, t) − ∂t∂ε ˇx(t, 0)
∂2
ε
˜f(y, t, 0) = D2
f(y) ∂ε ˇx(t, 0)[2]
+ Df(y) ∂2
ε ˇx(t, 0)
+ 2 ∂xg1
(y, t) ∂ε ˇx(t, 0) + 2 g2
(y, t) − ∂t∂2
ε ˇx(t, 0)
∂3
ε
˜f(y, t, 0) = D3
f(y) ∂ε ˇx(t, 0)[3]
+ 6 D2
f(y) (∂ε ˇx(t, 0), 1
2 ∂2
ε ˇx(t, 0)) + Df(y) ∂3
ε ˇx(t, 0)
+ 3 ∂2
xg1
(y, t) ∂ε ˇx(t, 0)[2]
+ 6 ∂xg2
(y, t) ∂ε ˇx(t, 0)
+ 6 ∂xg1
(y, t) 1
2 ∂2
ε ˇx(t, 0) + 6 g3
(y, t)
− ∂t∂3
ε ˇx(t, 0).
(1.35)
4. In a next step we compute the functions ∂ε ˇx(t, 0), ∂2
ε ˇx(t, 0) and ∂3
ε ˇx(t, 0) by solving differential
equations :
Recall that by GA 1.1a D3
H(0, 0) = 0 such that by definition of f, D2
f(0) = 0. Therefore (1.24)
together with (1.31), (1.35) yields the following linear inhomogeneous differential equations
∂t∂ε ˇx(t, 0) = Df(0) ∂εˇx(t, 0) + g1
(0, t) = Df(0) ∂ε ˇx(t, 0) +
|n|≤N
g1
n(0) eint
, (1.36)
∂t∂2
ε ˇx(t, 0) = Df(0) ∂2
ε ˇx(t, 0) + 2 ∂xg1
(0, t) ∂εˇx(t, 0) + 2 g2
(0, t) (1.37)
and
∂t∂3
ε ˇx(t, 0) = Df(0) ∂3
ε ˇx(t, 0) + D3
f(0) ∂ε ˇx(t, 0)[3]
+ 3 ∂2
xg1
(0, t) ∂ε ˇx(t, 0)[2]
+ 6 ∂xg2
(0, t) ∂εˇx(t, 0)
+ 6 ∂xg1
(0, t) 1
2 ∂2
ε ˇx(t, 0) + 6 g3
(0, t).
(1.38)
As we have shown in (1.12) in the proof of lemma 1.2.2, σ (Df(0)) ∩ i Z = ∅. Hence lemma 1.2.3
may be applied to equation (1.36). Therefore the unique 2π–periodic solution ∂ε ˇx(t, 0) of (1.36)
is given by
∂ε ˇx(t, 0) =
|n|≤N
α1,1
n eint
, where α1,1
n := [i n IC 2+d − Df(0)]
−1
g1
n(0). (1.39)
Let us rewrite the differential equation (1.37) using (1.24) and (1.39):
∂t∂2
ε ˇx(t, 0) = Df(0) ∂2
ε ˇx(t, 0) + 2
|n|≤N
Dg1
n(0)eint
|¯n|≤N
α1,1
¯n ei¯nt
+ 2
|n|≤N
g2
n(0) eint
= Df(0) ∂2
ε ˇx(t, 0) + 2
|n|≤N
g2
n(0) eint
+ 2
|n|,|¯n|≤N
Dg1
n(0) α1,1
¯n ei(n+¯n)t
.](https://image.slidesharecdn.com/134355b9-c3ce-41ca-8cf9-85f751f98ea6-160201091932/85/Invariant-Manifolds-Passage-through-Resonance-Stability-and-a-Computer-Assisted-Application-to-a-Synchronous-Motor-26-320.jpg)
![1.2. The Periodic Solution 13
Solving this equation with the help of lemma 1.2.3 again we obtain
1
2 ∂2
ε ˇx(t, 0) =
|n|≤N
α2,1
n eint
+
|n|,|¯n|≤N
α2,2
n,¯n ei(n+¯n)t
,
with α2,1
n := [i n IC 2+d − Df(0)]
−1
g2
n(0)
α2,2
n,¯n := [i (n + ¯n) IC 2+d − Df(0)]
−1
Dg1
n(0) α1,1
¯n .
(1.40)
Finally we proceed in an analogous way to obtain
1
6 ∂3
ε ˇx(t, 0) =
|n|,|¯n|,|˜n|≤N
α3,3
n,¯n,˜n ei(n+¯n+˜n)t
+
|n|,|¯n|≤N
α3,2
n,¯n ei(n+¯n)t
+
|n|≤N
α3,1
n eint
(1.41)
where
α3,3
n,¯n,˜n = [i (n + ¯n + ˜n) IC 2+d − Df(0)]
−1 1
6 D3
f(0)(α1,1
n , α1,1
¯n , α1,1
˜n )
+ 1
2 D2
g1
n(0)(α1,1
¯n , α1,1
˜n ) + Dg1
n(0) α2,2
¯n,˜n
α3,2
n,¯n = [i (n + ¯n) IC 2+d − Df(0)]−1
Dg1
n(0)α2,1
¯n + Dg2
n(0)α1,1
¯n
α3,1
n = [i n IC 2+d − Df(0)]−1
g3
n(0).
(1.42)
5. In order to gain expressions for the coefficient maps ∂ε
˜f(y, t, 0), 1
2 ∂2
ε
˜f(y, t, 0) and 1
6 ∂3
ε
˜f(y, t, 0) in
terms of known quantities, we combine the results derived in the first two steps. Let us introduce
the notations
∆(n, ˇQ, ˇP) := [i n IC 2 − JD2
H( ˇQ, ˇP)] i n IC 2 − JD2
H(0, 0)
−1
M(n, ˇQ, ˇP) :=
∆(n, ˇQ, ˇP) 0
0 IC d
= [i n IC 2+d − Df(y)] [i n IC 2+d − Df(0)]
−1
.
(1.43)
Note that ∆(n, 0, 0) = IC 2 and M(n, 0, 0) = IC 2+d . Using the identities (1.24) and (1.39) we rewrite
the first equation in (1.35):
∂ε
˜f(y, t, 0) =
|n|≤N
Df(y) α1,1
n + g1
n(y) − i n α1,1
n eint
=
|n|≤N
g1
n(y) − [i n IC 2+d − Df(y)] α1,1
n eint
=
|n|≤N
g1
n(y) − M(n, ˇQ, ˇP) g1
n(0) eint
. (1.44)
The analogous result for 1
2 ∂2
ε
˜f(y, t, 0) is achieved by substituting (1.24), (1.40) into the second](https://image.slidesharecdn.com/134355b9-c3ce-41ca-8cf9-85f751f98ea6-160201091932/85/Invariant-Manifolds-Passage-through-Resonance-Stability-and-a-Computer-Assisted-Application-to-a-Synchronous-Motor-27-320.jpg)
![14 Chapter 1. Reduction to a Planar System
equation of (1.35):
1
2 ∂2
ε
˜f(y, t, 0) = 1
2 D2
f(y)
|n|≤N
α1,1
n eint
,
|¯n|≤N
α1,1
¯n ei¯nt
+
|n|≤N
Df(y) α2,1
n eint
+
|n|,|¯n|≤N
Df(y) α2,2
n,¯n ei(n+¯n)t
+
|n|≤N
Dg1
n(y) eint
|¯n|≤N
α1,1
¯n ei¯nt
+
|n|≤N
g2
n(y)eint
−
|n|≤N
i n α2,1
n eint
−
|n|,|¯n|≤N
i (n + ¯n) α2,2
n,¯n ei(n+¯n)t
=
|n|≤N
Df(y) α2,1
n + g2
n(y) − i n α2,1
n eint
+
|n|,|¯n|≤N
1
2 D2
f(y) α1,1
n , α1,1
¯n + Df(y) α2,2
n,¯n + Dg1
n(y) α1,1
¯n
−i (n + ¯n) α2,2
n,¯n ei(n+¯n)t
.
Using the abbreviations defined in (1.43) together with the definitions of α2,1
n , α2,2
n,¯n given in (1.40)
we find
1
2 ∂2
ε
˜f(y, t, 0) =
|n|≤N
g2
n(y) − [i n IC 2+d − Df(y)] α2,1
n eint
+
|n|,|¯n|≤N
1
2 D2
f(y) α1,1
n , α1,1
¯n + Dg1
n(y) α1,1
¯n
− [i (n + ¯n) IC 2+d − Df(y)] α2,2
n,¯n ei(n+¯n)t
=
|n|≤N
g2
n(y) − [i n IC 2+d − Df(y)] [i n IC 2+d − Df(0)]
−1
g2
n(0) eint
+
|n|,|¯n|≤N
1
2 D2
f(y) α1,1
n , α1,1
¯n + Dg1
n(y) α1,1
¯n
− [i (n + ¯n) IC 2+d − Df(y)] [i (n + ¯n) IC 2+d − Df(0)]
−1
Dg1
n(0) α1,1
¯n ei(n+¯n)t
hence
1
2 ∂2
ε
˜f(y, t, 0) =
|n|≤N
g2
n(y) − M(n, ˇQ, ˇP) g2
n(0) eint
+
|n|,|¯n|≤N
1
2 D2
f(y) α1,1
n , α1,1
¯n + Dg1
n(y) − M(n + ¯n, ˇQ, ˇP)Dg1
n(0) α1,1
¯n ei(n+¯n)t
. (1.45)
In a similar way we deduce the following representation of 1
6 ∂3
ε
˜f(y, t, 0) from (1.24), (1.41) and the](https://image.slidesharecdn.com/134355b9-c3ce-41ca-8cf9-85f751f98ea6-160201091932/85/Invariant-Manifolds-Passage-through-Resonance-Stability-and-a-Computer-Assisted-Application-to-a-Synchronous-Motor-28-320.jpg)

![16 Chapter 1. Reduction to a Planar System
which by (1.40), (1.42) eventually leads to
1
6 ∂3
ε
˜f(y, t, 0) =
|n|≤N
g3
n(y) − M(n, ˇQ, ˇP) g3
n(0) eint
+
|n|,|¯n|≤N
D2
f(y) α1,1
n , α2,1
¯n + Dg2
n(y) − M(n + ¯n, ˇQ, ˇP) Dg2
n(0) α1,1
¯n
+ Dg1
n(y) − M(n + ¯n, ˇQ, ˇP)Dg1
n(0) α2,1
¯n ei(n+¯n)t
+
|n|,|¯n|,|˜n|≤N
D2
f(y) α1,1
n , α2,2
¯n,˜n
+ 1
6 D3
f(y) − M(n + ¯n + ˜n, ˇQ, ˇP) D3
f(0) α1,1
n , α1,1
¯n , α1,1
˜n
+ 1
2 D2
g1
n(y) − M(n + ¯n + ˜n, ˇQ, ˇP) D2
g1
n(0) α1,1
¯n , α1,1
˜n
+ Dg1
n(y) − M(n + ¯n + ˜n, ˇQ, ˇP) Dg1
n(0) α2,2
¯n,˜n) ei(n+¯n+˜n)t
.
(1.46)
6. In a next step, we split the quantities ∂ε
˜f(y, t, 0), 1
2 ∂2
ε
˜f(y, t, 0) and 1
6 ∂3
ε
˜f(y, t, 0) into two compo-
nents, expressed in terms of the maps Fj
n and Gj
n. This will lead us to the formulae claimed in
(1.18) and (1.21).
Using definitions (1.43), (1.24) we rewrite (1.44) as follows :
∂ε
˜f(y, t, 0) =
|n|≤N
F1
n( ˇQ, ˇP, H) − ∆(n, ˇQ, ˇP) F1
n (0, 0, 0)
G1
n( ˇQ, ˇP) − G1
n(0, 0)
eint
. (1.47)
For convenience we split the vectors αj,1
n , α2,2
n,¯n into two components of dimension 2 and d :
αj,1
n =:
αj,1
n,1
αj,1
n,2
α2,2
n,¯n =:
α2,2
n,¯n,1
α2,2
n,¯n,2
By definition (1.22) we find derivatives of f to be diagonal operators in the following sense :
Df(y) ∼=
JD2
H( ˇQ, ˇP) 0
0 A
D2
f(y)
( ˇQ1, ˇP1)
H1
( ˇQ2, ˇP2)
H2
=
JD3
H( ˇQ, ˇP)( ˇQ1, ˇP1)( ˇQ2, ˇP2)
0
(1.48)
D3
f(y)
( ˇQ1, ˇP1)
H1
( ˇQ2, ˇP2)
H2
( ˇQ3, ˇP3)
H3
=
JD4
H( ˇQ, ˇP)( ˇQ1, ˇP1)( ˇQ2, ˇP2)( ˇQ3, ˇP3)
0
.
Note that by simple consequence,
[i n IC 2+d − Df(y)] =
i n IC 2 − JD2
H( ˇQ, ˇP) 0
0 i n IC d − A
.
Together with the representation of α1,1
n introduced above, we obtain
D2
f(y) α1,1
n , αk,j
¯n =
JD3
H( ˇQ, ˇP) α1,1
n,1, αk,j
¯n,1
0
k, j = 1, 2, (1.49)](https://image.slidesharecdn.com/134355b9-c3ce-41ca-8cf9-85f751f98ea6-160201091932/85/Invariant-Manifolds-Passage-through-Resonance-Stability-and-a-Computer-Assisted-Application-to-a-Synchronous-Motor-30-320.jpg)

![18 Chapter 1. Reduction to a Planar System
+
|n|,|¯n|,|˜n|≤N
JD3
H( ˇQ, ˇP) α1,1
n,1, α2,2
¯n,˜n,1
0
+1
6
JD4
H( ˇQ, ˇP) − ∆(n + ¯n + ˜n, ˇQ, ˇP) JD4
H(0) α1,1
n,1 α1,1
¯n,1 α1,1
˜n,1
0
+1
2
∂2
(q,p)F1
n( ˇQ, ˇP, H) − ∆(n + ¯n + ˜n, ˇQ, ˇP) ∂2
(q,p)F1
n(0, 0, 0) α1,1
¯n,1, α1,1
˜n,1
∂2
(q,p)G1
n( ˇQ, ˇP) − ∂2
(q,p)G1
n(0, 0) α1,1
¯n,1, α1,1
˜n,1
+1
2
∂η∂(q,p)F1
n( ˇQ, ˇP, H) − ∆(n + ¯n + ˜n, ˇQ, ˇP) ∂η∂(q,p)F1
n (0, 0, 0) α1,1
˜n,1, α1,1
¯n,2
0
+1
2
∂(q,p)∂ηF1
n( ˇQ, ˇP, H) − ∆(n + ¯n + ˜n, ˇQ, ˇP) ∂(q,p)∂ηF1
n (0, 0, 0) α1,1
˜n,2, α1,1
¯n,1
0
+
∂(q,p)F1
n( ˇQ, ˇP, H) − ∆(n + ¯n, ˇQ, ˇP) ∂(q,p)F1
n(0, 0, 0) α2,2
¯n,˜n,1
∂(q,p)G1
n( ˇQ, ˇP) − ∂(q,p)G1
n(0, 0) α2,2
¯n,˜n,2
+
∂ηF1
n( ˇQ, ˇP, H) − ∆(n + ¯n, ˇQ, ˇP) ∂ηF1
n (0, 0, 0) α2,2
¯n,˜n,1
0
ei(n+¯n+˜n)t
.
7. Summarizing the identities given in (1.25), (1.29) and (1.27) we consider the transformed system
˙y = ˜f(y, t, ε) = f(y) + ε∂ε
˜f(y, t, 0) + 1
2 ε2
∂2
ε
˜f(y, t, 0) + 1
6 ε3
∂3
ε
˜f(y, t, 0) + ε4 ˜f4
(y, t, ε)
which by (1.22), (1.30) may be represented in the form
( ˙ˇQ, ˙ˇP)
˙H
=
J∇H( ˇQ, ˇP)
A H
+
3
j=1
εj
ˇFj
( ˇQ, ˇP, H, t)
ˇGj
( ˇQ, ˇP, t)
+ ε4
ˇF4
( ˇQ, ˇP, H, t, ε)
ˇG4
( ˇQ, ˇP, t, ε)
.
Thus the identities (1.18) hold as it has been established in (1.47), (1.51) respectively.
8. In order to obtain the formula given in (1.21) one has to consider the first two components of
1
6 ∂3
ε
˜f(y, t, 0), which by (1.30) represents the vector–valued map ˇF3
( ˇQ, ˇP, H, t).
9. It remains to prove the formulae given for the quantities α1,1
n,1, α1,1
n,2 etc. :
From the definition of (1.24) of gj
n(y) we have
gj
n(0) =
Fj
n(0, 0, 0)
Gj
n(0, 0)
j = 1, 2, 3
hence, by definitions (1.39), (1.40) of the vectors αj,1
n ,
αj,1
n =
i n IC 2 − JD2
H(0, 0)
−1
Fj
n(0, 0, 0)
[i n IC d − A]
−1
Gj
n(0, 0)
j = 1, 2.
Together with (1.50) this implies
Dg1
n(y) α1,1
¯n =
∂(q,p)F1
n( ˇQ, ˇP, H) α1,1
¯n,1 + ∂ηF1
n( ˇQ, ˇP, H) α1,1
¯n,2
∂(q,p)G1
n( ˇQ, ˇP) α1,1
¯n,1](https://image.slidesharecdn.com/134355b9-c3ce-41ca-8cf9-85f751f98ea6-160201091932/85/Invariant-Manifolds-Passage-through-Resonance-Stability-and-a-Computer-Assisted-Application-to-a-Synchronous-Motor-32-320.jpg)
![1.2. The Periodic Solution 19
such that definition (1.40) reads
α2,2
n,¯n =
i (n + ¯n) IC 2 − JD2
H(0, 0)
−1
∂(q,p)F1
n (0, 0, 0) α1,1
n,1 + ∂ηF1
n (0, 0, 0) α1,1
n,2
[i (n + ¯n) IC d − A]
−1
∂(q,p)G1
n(0, 0) α1,1
n,1
.
We therefore have established all assertions made in proposition 1.2.4.](https://image.slidesharecdn.com/134355b9-c3ce-41ca-8cf9-85f751f98ea6-160201091932/85/Invariant-Manifolds-Passage-through-Resonance-Stability-and-a-Computer-Assisted-Application-to-a-Synchronous-Motor-33-320.jpg)
![20 Chapter 1. Reduction to a Planar System
1.3 Some Illustrative Examples
As explained in section 1.1.3, the strategy of this chapter consists in proving the existence of a local,
attractive, two–dimensional invariant manifold. Once this step has been accomplished the qualitative
discussion of (1.1) is reduced to the discussion of a plane, non–autonomous system by considering the
system restricted to the attractive invariant manifold.
However there are a few points to be made when entering this line of attack. The majority of the results
on the existence of attractive invariant manifolds are based on the discussion of Lyapunov type numbers
of solutions, hence set in a more abstract framework4
rather than an applicable form. For the purpose
of this work an approach where assumptions are made on known quantities (as the vector field) is more
convenient.
The general setting for this case can be found in a result by Kirchgraber [9]. It supplies the existence
and additional properties of an attractive invariant manifold for mappings without giving smoothness,
however. In this work we will apply an adaption by Nipp / Stoffer [13] which deals with ODE’s and
establishes smoothness as well. The assumptions on the system made by Nipp / Stoffer are expressed
using certain Lipschitz numbers of the vector field and logarithmic norms of derivatives of the vector
field.
However, we must take into account that theLipschitz numbers of the vector field as well as the logarithmic
norms of the derivatives depend on the choice of coordinates. Hence it is of great interest to find
appropriate coordinates in order to obtain satisfactory results.
Thus the difficulties in discussing the assumptions on the Lyapunov type numbers necessary for the more
”abstract approach” are replaced by the problem of defining suitable coordinates, when aiming at the
setup made in [9] and [13]. The following example illustrates how the choice of ”unnatural” coordinates
may restrict the results obtained in an unsatisfactory way.
1.3.1 Example 1 (disadvantegous cartesian coordinates)
Consider the (unperturbed) system (1.16) in the case of H( ˇQ, ˇP) = ˇP2
/2 − cos( ˇQ) of the mathematical
pendulum,
˙ˇQ = ˇP
˙ˇP = − sin( ˇQ)
˙H = A H,
(1.55)
where A < 0. One of the assumptions made in Nipp / Stoffer [13] includes the existence of constants
γ1 ∈ R, γ2 > 0 such that
µ −JD2
H( ˇQ, ˇP) ≤ γ1, µ (A) ≤ −γ2, γ1 < γ2, (1.56)
uniformly, where µ (M) denotes the logarithmic norm of a matrix M (cf. definition 1.4.5). Choosing the
euclidean norm on R2
one has
µ −JD2
H( ˇQ, ˇP) = 1
2 1 − cos( ˇQ) µ (A) = A,
4as, for instance, given in [4], [6]](https://image.slidesharecdn.com/134355b9-c3ce-41ca-8cf9-85f751f98ea6-160201091932/85/Invariant-Manifolds-Passage-through-Resonance-Stability-and-a-Computer-Assisted-Application-to-a-Synchronous-Motor-34-320.jpg)


![1.3. Some Illustrative Examples 23
is invariant with respect to (1.59), the transformation
( ˇQ, ˇP) = (−εH, εH) + (Q, P) (1.64)
may be performed, yielding the system
˙Q = P + εP (P + ε H)
˙P = −Q
˙H = −H.
(1.65)
Here the right hand side of the ( ˙Q, ˙P)–equation vanishes for (Q, P) = (0, 0), hence the H–axis is invariant
with respect to (1.65). Applying (1.61) on (1.65) then yields
˙ϕ = 1 + ε cos2
(ϕ) (P(h) cos(ϕ) + ε H)
˙h = ε P(h)
d
dh P(h)
sin(ϕ) cos(ϕ) (P(h) cos(ϕ) + ε H)
˙H = −H.
(1.66)
Following the properties of P assumed in 1.97 a, this system admits a Cr+5
–extension into h = 0.
1.3.4 Example 4 (reasons to introduce the map P)
Let us rewrite transformation (1.61) of example 3 for P(h) =
√
2 h :
( ˇQ, ˇP) =
√
2 h
sin(ϕ)
cos(ϕ)
The solution (q, p)(t; 0,
√
2 h) with initial value (0,
√
2 h) at time t = 0 of the corresponding Hamiltonian
system satisfies H((q, p)(t; 0,
√
2 h)) = h for all t ∈ R. Hence for this choice of P, the action variable h
may be viewed as the ”energy” of the solutions. Although these action angle coordinates appear to be
suitable, the corresponding system is not differentiable in h = 0 :
˙ϕ = 1 + ε cos2
(ϕ)
√
2 h cos(ϕ) + ε H
˙h = ε h sin(ϕ) cos(ϕ)
√
2 h cos(ϕ) + ε H
˙H = −H.
In order to extend the corresponding system in action angle coordinates into h = 0 in a sufficient regular
way, assumption 1.97 b on the map P therefore is essential.
Additionally we will see in what follows, that the region of the phase space on which the result given in
[13] may be applied to, must be invariant. Due to this assumption, it may be necessary to introduce a
”cutting function” in order to change the vector field locally, if dealing with regions having non-invariant
boundaries. This may be achieved by choosing P in a suitable way. However, inside the regions (on
any compact subset) P may be taken as the identity P(h) = h. In the case 0 ∈ J we will see that the
set {h = 0} is invariant with respect to the corresponding system. Hence in this situation P(h) = h is
admissible even for small h ≥ 0.](https://image.slidesharecdn.com/134355b9-c3ce-41ca-8cf9-85f751f98ea6-160201091932/85/Invariant-Manifolds-Passage-through-Resonance-Stability-and-a-Computer-Assisted-Application-to-a-Synchronous-Motor-37-320.jpg)

![1.4. The Strongly Stable Manifold of the Equilibrium Point 25
1.4.1 The Existence of the Strongly Stable Manifold
In this first subsection we will state the existence of the strongly stable manifold of system (1.16) for
small parameters ε. The theory found in various contributions (see [8], [10]), which may be applied to
establish the existence of a strongly stable manifold deals with the special case where the linearization of
the perturbation vanishes at the origin.
Thus we are not in the position to apply these results directly5
. However it is possible to modify the
program carried out in [8] in a way such that the statements needed here may be established. We therefore
will not verify all details but confine ourselves with a sketch of the adapted proof strategy.
The main idea to proceed in the more general case where the linearization of the perturbation does not
vanish at the origin consist in writing the map V using a linear map Vλ in the form
V(t, H, ε) := λ Vλ(t, ε/λ2
, H) H (1.67)
where the existence of Vλ is obtained by a contraction mapping argument and λ is a sufficiently small,
fixed parameter. This will be demonstrated in the proof of the following proposition :
Proposition 1.4.1 Given any ̺ > 0 there exists an ε2 = ε2(r, ̺) as well as a map V defined for t ∈ R,
|H| < ̺, |ε| ≤ ε2 with values in R2
and of class Cr+7
(where all derivatives up to order r+7 are uniformly
bounded by 1) such that the graph
Nε := (t, ( ˇQ, ˇP), H) ∈ R × R2
× Rd
( ˇQ, ˇP) = V(t, H, ε), |H| < ̺ (1.68)
is an invariant set of (1.16). Moreover the map V satisfies the following properties :
1. V(t, 0, ε) = 0
2. V(t, H, 0) = 0
3. V is 2π–periodic with respect to t.
The proof of this proposition is carried out in several steps.
• The first step consist in simplifying the notation as follows : Given any fixed 0 < λ < 1 we set
(x, y) := (H, ( ˇQ, ˇP))
ϑ := (t, ǫ) := (t, ε/λ2
).
(1.69)
Using these abbreviations we will rewrite system (1.16) in autonomous form. The independent
variable will be denoted by s and differentiation with respect to s is marked by a dot again (i.e. ˙ϑ).
• Lemma 1.4.2 There exist maps X0, Y0, Y1 and Y2 defined for t ∈ R, |ǫ| < ε1, |x| < ̺ and y ∈ R2
as well as a matrix B ∈ R2×2
such that (1.16) is equivalent to the (autonomous) system
˙ϑ = a
˙x = A x + λ2
X0(ϑ, y; λ) y
˙y = B y + λ2
Y0(ϑ, y; λ) x + λ2
Y1(ϑ, y; λ) y + Y2(y)(y, y)
(1.70)
5The author of this thesis did not find a way to reproduce an estimate analogous to equation (32) in [8] for the situation
discussed there in section 6, i.e. the perturbed case. (For an illustrative example, consider the system ˙x = −x+ε y, ˙y = ε x.)
This eventually gave rise to the modification introduced here.](https://image.slidesharecdn.com/134355b9-c3ce-41ca-8cf9-85f751f98ea6-160201091932/85/Invariant-Manifolds-Passage-through-Resonance-Stability-and-a-Computer-Assisted-Application-to-a-Synchronous-Motor-39-320.jpg)

![1.4. The Strongly Stable Manifold of the Equilibrium Point 27
• In a next step we define an appropriate space for the maps V used in the ansatz (1.67) :
Definition 1.4.3 Let Xj
denote the following subspace of Cj
–maps taking values in the space
L(Rd
, R2
) of d × 2–matrices :
Xj
:= V ∈ Cj
(R × (−ε1, ε1) × Rd
, L(Rd
, R2
)) V satisfies (1.73 a)–(1.73 c) , (1.72)
where
1.73 a. V is ω–periodic with respect to ϑ
1.73 b. V (ϑ, x) = 0 if ϑ = (t, 0)
1.73 c. V X j < ∞ with V X j := max
α∈N 2+d
0≤|α|≤j
sup
t∈R
|ǫ|≤ε1
sup
|x|<̺
∂ α
(ϑ,x)V (ϑ, x) .
Note that for any multi–index α ∈ N2+d
, |α| := α1 + · · ·+ α2+d and ∂ α
(ϑ,x) := ∂ α1
t ∂ α2
ǫ ∂ α3
x1
. . . ∂
α2+d
xd .
Then (Xj
, . X j ) is a Banach space.
• For any V ∈ Xr+7
we substitute y = λ V (ϑ, x) x into the perturbation terms of (1.70), i.e. consider
the systems
˙ϑ = a
˙x = A x + λ3
X0(ϑ, λ V (ϑ, x) x; λ) V (ϑ, x) x
(1.74)
and
˙y = B y + λ2
Y0(ϑ, λ V (ϑ, x) x; λ) x + λ3
Y1(ϑ, λ V (ϑ, x) x; λ) V (ϑ, x) x
+ λ2
Y2(λ V (ϑ, x) x)(V (ϑ, x) x, V (ϑ, x) x).
(1.75)
Let (ϑ, x)(s) := (ϑ, x)(s; ϑ0, x0; V ) denote the solution of (1.74) with initial value (ϑ0, x0) at time
s = 0 (where ϑ0 := (t0, ε0)) depending on V . We then will show that there exists a Vλ ∈ Xr+7
,
such that
y(s) := λ Vλ((ϑ, x)(s; ϑ0, x0; Vλ))) x(s)
is a solution of (1.75) for V = Vλ. This, however implies immediately that (ϑ, x, y)(s) is a solution
of (1.70). We will establish the existence of such a Vλ in an analogous way to the process given in
[8]. In particular the rescalation parameter λ is necessary to obtain sufficient regularity.
• For any fixed V ∈ BX r+8 (1) where
BX r+8 (1) := V ∈ Xr+8
V X r+8 ≤ 1
the following lemma presents a result on the fundamental solutions associated with (1.74):
Lemma 1.4.4 For any initial value (ϑ0, x0) and any V ∈ BX r+8 (1) let U(s) = U(s; ϑ0, x0; V )
denote the unique solution of
˙U(s) = A + λ3
X0(ϑ(s), λ V (ϑ(s), x(s)) x(s); λ) V (ϑ(s), x(s)) U(s) (1.76)
satisfying U(0) = IRd . Then x(s; ϑ0, x0; V ) = U(s; ϑ0, x0; V ) x0.
Moreover there exists λ1 > 0 and a polynomial π(s) with positive coefficients such that for 0 < λ <
λ1 and |x0| < ̺,
|U(s; ϑ0, x0; V )| ≤ e−
c0
2 s
∂ α
(ϑ0,x0)U(s; ϑ0, x0; V ) ≤ e−
c0
2 s
λ3
π(s) 0 < |α| ≤ r + 8.](https://image.slidesharecdn.com/134355b9-c3ce-41ca-8cf9-85f751f98ea6-160201091932/85/Invariant-Manifolds-Passage-through-Resonance-Stability-and-a-Computer-Assisted-Application-to-a-Synchronous-Motor-41-320.jpg)
![28 Chapter 1. Reduction to a Planar System
This lemma 1.4.4 is proved by induction with respect to the length |α| of the multi–index α. The
induction is carried out using the notion of the logarithmic norm (introduced in the following
definition 1.4.5) and the statement given in lemma 1.4.6 :
Definition 1.4.5 Following Stroem [18] we introduce the so–called logarithmic norm of a matrix
M ∈ Rn×n
by
µ (M) := lim
δ→0+
|IRn + δ M| − 1
δ
,
where |.| denotes the matrix norm based on the norm chosen on Rn
.
As a simple consequence of lemma 2 in [18] we find
Lemma 1.4.6 Consider a solution W(s) of the inhomogenous, non–autonomous linear differential
equation
˙W(s) = M(s) W(s) + N(s)
where M(s), N(s) are time–dependent linear operators on Rd
, the logarithmic norm µ(M(s)) is
uniformly bounded by −c0
2 and |N(s)| ≤ λ3
e−
c0
2 s
˜π(s) (˜π is a polynomial with positive coefficients).
Then
|W(s)| ≤ e−
c0
2 s
|W(0)| + λ3
π(s) s ≥ 0.
where π(s) =
s
0
˜π(t) dt has positive coefficients as well.
• As mentioned above, the existence of a map Vλ defining an invariant manifold (see (1.67), (1.68))
is established using the contraction mapping theorem. The definition of the mapping considered
and the proof of its contracting properties are the subject of the next step in this line:
Lemma 1.4.7 There exists a λ2 := λ2(r, ̺) > 0 such that for every V ∈ BX r+8 (1), 0 < λ < λ2,
the image T V of the map T , given by
T V (ϑ0, x0) = − 1
λ
∞
0
e−sB
λ2
Y0(ϑ, λ V (ϑ, x) x; λ) U
+ λ3
Y1(ϑ, λ V (ϑ, x) x; λ) V (ϑ, x) U
+ λ2
Y2(λ V (ϑ, x) x)(V (ϑ, x) x, V (ϑ, x) U) ds
(1.77)
exists. Recall that (ϑ, x)(s) = (ϑ, x)(s; ϑ0, x0; V ), U(s) = U(s; ϑ0, x0; V ) denote solutions of (1.74),
(1.76) respectively.
Moreover, the map T is a contraction from BX r+8 (1) to BX r+8 (1) with respect to the Xr+7
–topology
induced on Xr+8
, i.e.
1.78 a. T V ∈ BX r+8 (1)
1.78 b. T V1 − T V2 X r+7 ≤ 1
2 V1 − V2 X r+7 for all V1, V2 in BX r+8 (1).
The way followed to establish this statement is similar to the one given in [8], p. 558–561. The
estimates found in lemma 1.4.4 are used repeatedly. Furthermore one has to apply lemma 1.4.6 to
derive the scalar bounds for ∂ α
(ϑ,x)T V , ∂ α
(ϑ,x) (T V1 − T V2), respectively.](https://image.slidesharecdn.com/134355b9-c3ce-41ca-8cf9-85f751f98ea6-160201091932/85/Invariant-Manifolds-Passage-through-Resonance-Stability-and-a-Computer-Assisted-Application-to-a-Synchronous-Motor-42-320.jpg)



![32 Chapter 1. Reduction to a Planar System
and more explicitely
ˆF1
(Q, P, H, t) = J D2
H(Q, P) − D2
H(0, 0) V1
(t) H
+ ˇF1
(Q, P, H, t) − ˇF1
(0, 0, H, t)
ˆF2
(Q, P, H, t) = J D2
H(Q, P) − D2
H(0, 0) V2
(t, H) H
+ 1
2 JD3
H(Q, P)(V1
(t)H)[2]
+ ˇF2
(Q, P, H, t) − ˇF2
(0, 0, H, t)
+ ∂( ˇQ, ˇP )
ˇF1
(Q, P, H, t) − ∂( ˇQ, ˇP )
ˇF1
(0, 0, H, t) V1
(t) H
− V1
(t) ˇG1
(Q, P, t)
(1.90)
as well as
ˆG1
(Q, P, H, t) = ˇG1
(Q, P, t)
ˆG2
(Q, P, H, t) = ˇG2
(Q, P, t) + ∂( ˇQ, ˇP )
ˇG1
(Q, P, t) V1
(t) H.
(1.91)
• The map ˆF3
may be written in the form
ˆF3
(Q, P, H, t) = ˇF3
(Q, P, 0, t) − ˇF3
(0, 0, 0, t)
− V1
(t) ˇG2
(Q, P, t) − ˇG2
(0, 0, t) + ˆF3,1
(Q, P, H, t)H
(1.92)
for a suitable map ˆF3,1
: R2
× Rd
× R → L(Rd
, R2
).
• Finally, ˆF1
, ˆF2
, ˆG1
and ˆG2
may be represented as Fourier polynomials in t, i.e.
ˆFj
(Q, P, H, t) =
|n|≤jN
ˆFj
n(Q, P, H, t) eint ˆGj
(Q, P, H, t) =
|n|≤jN
ˆGj
n(Q, P, H, t) eint
.
(1.93)
Note that although we write H in the arguments of ˆG1
in (1.89) for simplicity, this map does not depend
on H.
PROOF: Taking the time derivative of transformation (1.86) and using (1.16) we find
( ˙Q, ˙P) = J∇H((Q, P) + V(t, H, ε)) + ˇF((Q, P) + V(t, H, ε), H, t, ε)
−∂tV(t, H, ε) − ∂HV(t, H, ε) A H + ˇG((Q, P) + V(t, H, ε), t, ε) .
which together with the identity found for ∂tV(t, H, ε) in remark 1.4.8 yields
( ˙Q, ˙P) = J∇H((Q, P) + V(t, H, ε)) − J∇H(V(t, H, ε))
+ ˇF((Q, P) + V(t, H, ε), H, t, ε) − ˇF(V(t, H, ε), H, t, ε)
−∂HV(t, H, ε) ˇG((Q, P) + V(t, H, ε), t, ε) − ˇG(V(t, H, ε), t, ε) .
Setting
ˆF(Q, P, H, t, ε) := J∇H((Q, P) + V(t, H, ε)) − J∇H(V(t, H, ε)) − J∇H(Q, P)
+ ˇF((Q, P) + V(t, H, ε), H, t, ε) − ˇF(V(t, H, ε), H, t, ε)
− ∂HV(t, H, ε) ˇG((Q, P) + V(t, H, ε), t, ε) − ˇG(V(t, H, ε), t, ε)
(1.94)](https://image.slidesharecdn.com/134355b9-c3ce-41ca-8cf9-85f751f98ea6-160201091932/85/Invariant-Manifolds-Passage-through-Resonance-Stability-and-a-Computer-Assisted-Application-to-a-Synchronous-Motor-46-320.jpg)
![1.4. The Strongly Stable Manifold of the Equilibrium Point 33
we find ˆF to be of class Cr+7
(since V ∈ Cr+7
) and
( ˙Q, ˙P) = J∇H(Q, P) + ˆF(Q, P, H, t, ε).
Expanding ˆF with respect to V(t, H, ε) yields
ˆF(Q, P, H, t, ε) = JD2
H(Q, P) − JD2
H(0, 0) V(t, H, ε)
+1
2 JD3
H(Q, P) − JD3
H(0, 0) V(t, H, ε)[2]
+O(V(t, H, ε)[3]
)
+ ˇF(Q, P, H, t, ε) − ˇF(0, 0, H, t, ε)
+ ∂( ˇQ, ˇP )
ˇF(Q, P, H, t, ε) − ∂( ˇQ, ˇP )
ˇF(0, 0, H, t, ε) V(t, H, ε)
+1
2 ∂2
( ˇQ, ˇP )
ˇF(Q, P, H, t, ε) − ∂2
( ˇQ, ˇP )
ˇF(0, 0, H, t, ε) V(t, H, ε)[2]
+O(V(t, H, ε)[3]
)
−∂HV(t, H, ε) ˇG(Q, P, t, ε) − ˇG(0, 0, t, ε)
+ ∂( ˇQ, ˇP )
ˇG(Q, P, t, ε) − ∂( ˇQ, ˇP )
ˇG(0, 0, t, ε) V(t, H, ε)
+1
2 ∂2
( ˇQ, ˇP )
ˇG(Q, P, t, ε) − ∂2
( ˇQ, ˇP )
ˇG(0, 0, t, ε) V(t, H, ε)[2]
+O(V(t, H, ε)[3]
) .
Plugging in the expansion of V(t, H, ε) as given in (1.80), i.e.
V(t, H, ε) = ε V1
(t)H + ε2
V2
(t, H) H + ε3
V3
(t, H, ε),
we conclude
ˆF(Q, P, H, t, ε) = ε JD2
H(Q, P) − JD2
H(0, 0) V1
(t) H
+ ˇF1
(Q, P, H, t) − ˇF1
(0, 0, H, t)
+ε2
JD2
H(Q, P) − JD2
H(0, 0) V2
(t, H) H
+1
2 JD3
H(Q, P) − JD3
H(0, 0) V1
(t) H
[2]
+ ˇF2
(Q, P, H, t) − ˇF2
(0, 0, H, t)
+ ∂( ˇQ, ˇP )
ˇF1
(Q, P, H, t) − ∂( ˇQ, ˇP )
ˇF1
(0, 0, H, t) V1
(t) H
−V1
(t) ˇG1
(Q, P, t) − ˇG1
(0, 0, t)
+ε3 ˇF3
(Q, P, 0, t) − ˇF3
(0, 0, 0, t) − V1
(t) ˇG2
(Q, P, t) − ˇG2
(0, 0, t)
+ε3
O(H) + O(ε4
).
(Take into account that the terms included in O(V(t, H, ε)[3]
) are of order ε3
or higher and vanish for
H = 0).
Since D3
H(0, 0) = 0, ˇF3
(0, 0, 0, t) = 0 (cf. GA 1.1b, proposition 1.2.4) the formulae (1.90), (1.92) given
in the claim are established. The representation of ˆG(Q, P, H, t, ε) is found in an easier way :
˙H = A H + ˇG( ˇQ, ˇP, t, ε)
= A H + ˇG((Q, P) + V(t, H, ε), t, ε).](https://image.slidesharecdn.com/134355b9-c3ce-41ca-8cf9-85f751f98ea6-160201091932/85/Invariant-Manifolds-Passage-through-Resonance-Stability-and-a-Computer-Assisted-Application-to-a-Synchronous-Motor-47-320.jpg)
![34 Chapter 1. Reduction to a Planar System
Define ˆG(Q, P, H, t, ε) := ˇG((Q, P) + V(t, H, ε), t, ε), then ˆG ∈ Cr+7
, ˙H = A H + ˆG(Q, P, H, t, ε) and
ˆG(Q, P, H, t, ε) = ˇG(Q, P, t, ε) + ∂( ˇQ, ˇP)
ˇG(Q, P, t, ε)V(t, H, ε)
+1
2 ∂2
( ˇQ, ˇP )
ˇG(Q, P, t, ε)V(t, H, ε)[2]
+ O(V(t, H, ε)[3]
)
= ε ˇG1
(Q, P, t) + ε2 ˇG2
(Q, P, t) + ∂( ˇQ, ˇP )
ˇG1
(Q, P, t) V1
(t)H + O(ε3
)
which corresponds to (1.91).
The last statement of proposition 1.4.9 is obtained by plugging (1.93) and (1.83) into the representations
(1.90), (1.91) respectively.
Note that since we have used the non–autonomous representation (1.16), the independent variable cor-
responds to t again. Hence ˙Q etc. denote the derivatives with respect to t.
Remark 1.4.10 It may be readily seen that if substituting F, G by ˆF, ˆG system (1.87) fulfills the
assumptions made in GA 1.1–GA 1.3. By consequence of the transformations carried out the identities
(1.88) hold and the vector fields ˆF, ˆG are of class Cr+7
.
In the next section we will consider systems of this type in general and introduce action angle coordinates.](https://image.slidesharecdn.com/134355b9-c3ce-41ca-8cf9-85f751f98ea6-160201091932/85/Invariant-Manifolds-Passage-through-Resonance-Stability-and-a-Computer-Assisted-Application-to-a-Synchronous-Motor-48-320.jpg)

![36 Chapter 1. Reduction to a Planar System
Using the solutions (q, p)(t; q0, p0) of the Hamiltonian system (1.2) we introduce a map Φ as follows:
Definition 1.5.1 Consider the maps Ω and P as in GA 1.1b, 1.97 a. We define the following quantities:
1. For any ϕ, h ∈ R let (˜q, ˜p) (ϕ, p0) := (q, p)( ϕ
Ω(p0) ; 0, p0) and set
Φ(ϕ, h) := (˜q, ˜p)(ϕ, P(h)). (1.98)
2. In order to shorten the notation we introduce the map
ω(h) := Ω(P(h)). (1.99)
The first lemma in this section gives a summary of a few properties of the map Φ.
Lemma 1.5.2 The following statements on the maps Ω, Φ are true:
1. The map Φ is of class Cω
(R2
, R2
) and 2π–periodic with respect to ϕ ∈ R.
2. If 0 ∈ J then
Φ(ϕ, 0) = 0. (1.100)
3. Let Ω0 denote the quantity introduced in GA 1.1a. Then
Ω(0) = Ω0. (1.101)
4. For all (ϕ, h) ∈ R2
the Jacobian determinant of Φ satisfies
det D Φ(ϕ, h) = ω(h)−1 d
dh H(0, P(h)). (1.102)
For 0 ∈ J this determinant tends towards zero, i.e. det D Φ(ϕ, h) → 0 as h → 0.
PROOF: The first two statements are simple consequences of GA 1.1 and 1.97 a together with the
definition of Φ. We therefore content ourselves with the proof of assertions 3 and 4.
In order to establish (1.101), let us rescale the (q, p)–coordinates of system (1.2) with a parameter λ > 0:
(q, p) = (λ¯q, λ¯p).
We rewrite the right hand side of system (1.2) in the form of a Taylor polynomial using the integral
formula for the remainder term which in addition with ∇H(0, 0) = 0 yields the expression
˙¯q
˙¯p
= JD2
H(0, 0)
¯q
¯p
+ λ
1
0
(1 − σ) J D3
H(σλ¯q, σλ¯p)(¯q, ¯p)[2]
dσ. (1.103)
Let (¯q, ¯p)(t; 0, ¯p0, λ) denote the solution of (1.103) with initial value (0, ¯p0) at time t = 0, where λ may
take any real value. Consider any p0 ∈ J . Then the function (q, p)(t; 0, λ ¯p0) is a solution of (1.2), with](https://image.slidesharecdn.com/134355b9-c3ce-41ca-8cf9-85f751f98ea6-160201091932/85/Invariant-Manifolds-Passage-through-Resonance-Stability-and-a-Computer-Assisted-Application-to-a-Synchronous-Motor-50-320.jpg)




![1.5. The Action Angle Coordinates 41
Omitting the argument t − t(0) of ϕ, h, Q, P and H it suffices to show that
F2(t, ϕ, h, H, ε)
F3(t, ϕ, h, H, ε)
= [DΦ(ϕ, h)]
−1
J∇H(Q, P) + ˆF(Q, P, H, t, ε) , (1.113)
as this implies the first claim at once. Since DΦ(ϕ, h) ∈ R2×2
we find
[DΦ(ϕ, h)]
−1
= (det DΦ(ϕ, h))
−1
d
dh ˜p(ϕ, P(h)) − d
dh ˜q(ϕ, P(h))
−∂ϕ ˜p(ϕ, P(h)) ∂ϕ ˜q(ϕ, P(h))
.
Applying (1.102) and (1.105) we find
[DΦ(ϕ, h)]
−1
= ω(h)
d
dh H(0,P(h))
d
dh ˜p(ϕ, P(h)) − d
dh ˜q(ϕ, P(h))
ω(h)−1
∂qH(Φ(ϕ, h)) ω(h)−1
∂pH(Φ(ϕ, h))
= ω(h)
d
dh H(0,P(h))
(J∂hΦ(ϕ, h))T
ω(h)−1
(∇H(Φ(ϕ, h)))T
.
Hence for the first component of (1.113) we have to prove
F2(t, ϕ, h, H, ε) = ω(h)
d
dh H(0,P(h))
J∂hΦ(ϕ, h)| J∇H(Φ(ϕ, h)) + ˆF(Φ(ϕ, h), H, t, ε)
= ω(h)
d
dh H(0,P(h))
(∂hΦ(ϕ, h)| ∇H(Φ(ϕ, h)))
+ ω(h)
d
dh H(0,P(h))
J∂hΦ(ϕ, h)| ˆF(Φ(ϕ, h), H, t, ε) .
Together with the identity (1.107), thus
d
dh H(0, P(h)) = d
dh H(Φ(ϕ, h)) = (∂hΦ(ϕ, h)| ∇H(Φ(ϕ, h)))
this turns out to be equivalent to
F2(t, ϕ, h, H, ε) = ω(h) + ω(h)
d
dh H(0,P(h))
J∂hΦ(ϕ, h)| ˆF(Φ(ϕ, h), H, t, ε) ,
which coincides with the definition of F2 given in (1.110). In much the similar way, for the second
component of (1.113) we have to establish
F3(t, ϕ, h, H, ε) = 1
d
dh H(0,P(h))
(∇H(Φ(ϕ, h))| J∇H(Φ(ϕ, h)))
+ 1
d
dh H(0,P(h))
∇H(Φ(ϕ, h))| ˆF(Φ(ϕ, h), H, t, ε)
= 1
d
dh H(0,P(h))
∇H(Φ(ϕ, h))| ˆF(Φ(ϕ, h), H, t, ε) .
This holds again by (1.110).](https://image.slidesharecdn.com/134355b9-c3ce-41ca-8cf9-85f751f98ea6-160201091932/85/Invariant-Manifolds-Passage-through-Resonance-Stability-and-a-Computer-Assisted-Application-to-a-Synchronous-Motor-55-320.jpg)

![1.5. The Action Angle Coordinates 43
The mappings F2, F3, of definition 1.5.5 are of class Cr+4
for t, ϕ, h ∈ R, H ∈ BRd (̺) and |ε| ≤ ε2 and
may be represented in the form
F2(t, ϕ, h, H, ε) = Ω0 + 1
ν J Φ,1
(ϕ) ∂(Q,P )
ˆF(0, 0, 0, t, ε) Φ,1
(ϕ)
+ 1
ν J Φ,1
(ϕ) ∂(Q,P )∂H
ˆF(0, 0, 0, t, ε)(H, Φ,1
(ϕ))
+ 1
2 P(h) 1
ν J Φ,1
(ϕ) ∂2
(Q,P )
ˆF(0, 0, 0, t, ε) Φ,1
(ϕ)[2]
+ ˜f,,2
(ϕ, P(h), H, t, ε) H[2]
+ P(h) ˜f,,1
(ϕ, P(h), H, t, ε) H + P(h)
2 ˜f,,0
(ϕ, P(h), H, t, ε) (1.115)
F3(t, ϕ, h, H, ε) = P(h)
d
dh P(h)
1
∂2
pH(0,0) H,1
(ϕ) ∂(Q,P )
ˆF(0, 0, 0, t, ε) Φ,1
(ϕ)
+ P(h)
d
dh P(h)
1
∂2
p H(0,0) H,1
(ϕ) ∂(Q,P )∂H
ˆF(0, 0, 0, t, ε)(H, Φ,1
(ϕ))
+ 1
2
P(h)2
d
dh P(h)
1
∂2
pH(0,0) H,1
(ϕ) ∂2
(Q,P )
ˆF(0, 0, 0, t, ε) Φ,1
(ϕ)[2]
+ P(h)
d
dh P(h)
˜g,,2
(ϕ, P(h), H, t, ε) H[2]
+ P(h)2
d
dh P(h)
˜g,,1
(ϕ, P(h), H, t, ε) H + P(h)3
d
dh P(h)
˜g,,0
(ϕ, P(h), H, t, ε) (1.116)
where ˜f,,j
, ˜g,,j
are Cr+4
, 2π–periodic with respect to t and ϕ and
ν =
∂2
pH(0, 0)
∂2
q H(0, 0)
Φ,1
(ϕ) =
ν sin(ϕ)
cos(ϕ)
H,1
(ϕ) =
Ω0 sin(ϕ)
∂2
pH(0, 0) cos(ϕ)
. (1.117)
Moreover ˆG(Φ(ϕ, h), H, t, ε) is of class Cr+4
as well, admitting a very similar representation:
ˆG(Φ(ϕ, h), H, t, ε) = P(h) ∂(Q,P )
ˆG(0, 0, 0, t, ε) Φ,1
(ϕ) + ∂H
ˆG(0, 0, 0, t, ε) H
+ ˜h,,2
(ϕ, P(h), H, t, ε) H[2]
+ P(h) ˜h,,1
(ϕ, P(h), H, t, ε) H + P(h)
2 ˜h,,0
(ϕ, P(h), H, t, ε). (1.118)
PROOF: We begin this proof by recalling that due to GA 1.1b and lemma 1.5.2 the maps Ω and Φ are
of class Cω
on J , R2
respectively. However we recall that the vector fields ˆF and ˆG are of class Cr+7
only. In the following steps we will loose some of this differentiability as we perform expansions in order
to yield the expressions (1.115)–(1.118).
1. Using (1.101) together with GA 1.1c, the Taylor formula yields
Ω(p0) = Ω0 + p0
2
1
0
∂2
p0
Ω(σ p0) (1 − σ) dσ
hence setting A0(p0) :=
1
0
∂2
p0
Ω(σ p0) (1 − σ) dσ we have
ω(h) = Ω0 + P(h)
2
A0(P(h)). (1.119)](https://image.slidesharecdn.com/134355b9-c3ce-41ca-8cf9-85f751f98ea6-160201091932/85/Invariant-Manifolds-Passage-through-Resonance-Stability-and-a-Computer-Assisted-Application-to-a-Synchronous-Motor-57-320.jpg)
![44 Chapter 1. Reduction to a Planar System
2. As (Q, P) = (0, 0) is a fixed point of the Hamiltonian system (cf. GA 1.1a) we have (˜q, ˜p) (ϕ, 0) =
(0, 0), thus
(˜q, ˜p) (ϕ, p0) = p0 (∂p0 ˜q, ∂p0 ˜p)(ϕ, 0) + 1
2 p0
2
(∂2
p0
˜q, ∂2
p0
˜p)(ϕ, 0)
+ 1
2 p0
3
1
0
(∂3
p0
˜q, ∂3
p0
˜p)(ϕ, σ p0) (1 − σ)2
dσ.
(1.120)
Recall that (˜q, ˜p) is 2π–periodic with respect to ϕ.
In order to find an alternative form for (∂p0 ˜q, ∂p0 ˜p)(ϕ, 0) we take derivatives with respect to ϕ in
(1.120) obtaining
∂ϕ (˜q, ˜p) (ϕ, p0) = p0 ∂ϕ(∂p0 ˜q, ∂p0 ˜p)(ϕ, 0) + 1
2 p0
2
∂ϕ(∂2
p0
˜q, ∂2
p0
˜p)(ϕ, 0) + O(p3
0). (1.121)
On the other hand, the definition of (˜q, ˜p) implies
∂ϕ (˜q, ˜p) (ϕ, p0) = 1
Ω(p0) ∂t(q, p)( ϕ
Ω(p0) ; 0, p0) = 1
Ω(p0) J∇H ((˜q, ˜p) (ϕ, p0))
= 1
Ω(p0) JD2
H(0, 0) ((˜q, ˜p) (ϕ, p0)) + 1
2 JD3
H(0, 0) ((˜q, ˜p) (ϕ, p0))
[2]
+ 1
2
1
0
JD4
H (σ (˜q, ˜p) (ϕ, p0)) (1 − σ)2
dσ ((˜q, ˜p) (ϕ, p0))
[3]
.
(1.122)
Plugging (1.120) into (1.122) and comparing coefficients of equal powers of p0 in (1.121) one obtains
∂ϕ(∂p0 ˜q, ∂p0 ˜p)(ϕ, 0) = 1
Ω0
JD2
H(0, 0)(∂p0 ˜q, ∂p0 ˜p)(ϕ, 0)
∂ϕ(∂2
p0
˜q, ∂2
p0
˜p)(ϕ, 0) = 1
Ω0
JD2
H(0, 0)(∂2
p0
˜q, ∂2
p0
˜p)(ϕ, 0)
+JD3
H(0, 0) ((∂p0 ˜q, ∂p0 ˜p)(ϕ, 0))
[2]
.
Differentiating the initial condition (˜q, ˜p) (0, p0) = (0, p0) with respect to p0 and evaluating these
derivatives for p0 = 0 yields the following initial conditions :
(∂p0 ˜q, ∂p0 ˜p)(0, 0) = (0, 1)
(∂2
p0
˜q, ∂2
p0
˜p)(0, 0) = (0, 0).
Taking into account D3
H(0, 0) = 0 we eventually find
(∂p0 ˜q, ∂p0 ˜p)(ϕ, 0) = e
ϕ
Ω0
JD2
H(0,0) 0
1
(∂2
p0
˜q, ∂2
p0
˜p)(ϕ, 0) = 0.
The formula for etJD2
H(0,0)
found in (1.104), i.e.
etJD2
H(0,0)
=
cos(Ω0 t)
∂2
pH(0,0)
∂2
q H(0,0) sin(Ω0 t)
−
∂2
q H(0,0)
∂2
p H(0,0) sin(Ω0 t) cos(Ω0 t)
](https://image.slidesharecdn.com/134355b9-c3ce-41ca-8cf9-85f751f98ea6-160201091932/85/Invariant-Manifolds-Passage-through-Resonance-Stability-and-a-Computer-Assisted-Application-to-a-Synchronous-Motor-58-320.jpg)
![1.5. The Action Angle Coordinates 45
implies
(∂p0 ˜q, ∂p0 ˜p)(ϕ, 0) =
∂2
p H(0,0)
∂2
q H(0,0) sin(ϕ)
cos(ϕ)
.
Thus setting ν :=
∂2
p H(0,0)
∂2
q H(0,0) and Φ,1
(ϕ) :=
ν sin(ϕ)
cos(ϕ)
together with
A1(ϕ, p0) := 1
2
1
0
(∂3
p0
˜q, ∂3
p0
˜p)(ϕ, σ p0) (1 − σ)2
dσ
we conclude from (1.120)
Φ(ϕ, h) = (˜q, ˜p)(ϕ, P(h)) = P(h) Φ,1
(ϕ) + P(h)
3
A1(ϕ, P(h)). (1.123)
3. The identities ∇H(0, 0) = 0 and D3
H(0, 0) = 0 imply together with (1.123)
∇H(Φ(ϕ, h)) = D2
H(0, 0) Φ(ϕ, h) + 1
2
1
0
D4
H (σ Φ(ϕ, h)) (1 − σ)2
dσ (Φ(ϕ, h))
[3]
= P(h) D2
H(0, 0) Φ,1
(ϕ) + P(h)
3
D2
H(0, 0) A1(ϕ, P(h))
+P(h)
3 1
2
1
0
D4
H (σ Φ(ϕ, h)) (1 − σ)2
dσ Φ,1
(ϕ) + P(h)
2
A1(ϕ, P(h))
[3]
such that when setting H,1
(ϕ) :=
Ω0 sin(ϕ)
∂2
pH(0, 0) cos(ϕ)
,
A2(ϕ, p0) := D2
H(0, 0) A1(ϕ, p0) + 1
2
1
0
D4
H (σ (˜q, ˜p) (ϕ, p0)) (1 − σ)2
dσ Φ,1
(ϕ) + p0
2
A1(ϕ, p0)
[3]
we obtain
∇H(Φ(ϕ, h)) = P(h)
∂2
q H(0, 0) 0
0 ∂2
pH(0, 0)
ν sin(ϕ)
cos(ϕ)
+ P(h)
3
A2(ϕ, P(h))
= P(h) H,1
(ϕ) + P(h)
3
A2(ϕ, P(h)). (1.124)
The map A2 is 2π–periodic with respect to ϕ.
4. In a similar way we may write
∂pH(0, P(h)) = P(h) ∂2
pH(0, 0) + 1
2 P(h)3
1
0
∂4
pH(0, σ P(h)) (1 − σ)2
dσ
= P(h)
∂2
pH(0, 0) + 1
2 P(h)
2
1
0
∂4
pH(0, σ P(h)) (1 − σ)2
dσ
= P(h) A3(P(h)),](https://image.slidesharecdn.com/134355b9-c3ce-41ca-8cf9-85f751f98ea6-160201091932/85/Invariant-Manifolds-Passage-through-Resonance-Stability-and-a-Computer-Assisted-Application-to-a-Synchronous-Motor-59-320.jpg)
![46 Chapter 1. Reduction to a Planar System
where A3(p0) := ∂2
pH(0, 0) + 1
2 p0
2
1
0
∂4
pH(0, σ p0) (1 − σ)2
dσ satisfies A3(0) = ∂2
pH(0, 0).
Hence we conclude
d
dh H(0, P(h)) = ∂pH(0, P(h)) d
dh P(h) = d
dh P(h) P(h) A3(P(h)). (1.125)
5. Since by assumption A3(P(h)) =
∂pH(0,P(h))
P(h) = 0 the map h → 1
A3(P(h)) is of class Cω
. This
together with 1.97 a implies that the function P(h)
d
dh P(h) A3(P(h))
is of class Cω
for h ∈ R.
6. As ˆF(0, 0, H, t, ε) = 0 (cf. (1.96), (1.88) respectively), we find ∂k
H
ˆF(0, 0, H, t, ε) = 0 for all 0 ≤ k ≤
r + 7, hence the Taylor expansion of ˆF(Q, P, H, t, ε) is of the form
ˆF(Q, P, H, t, ε) = ∂(Q,P )
ˆF(0, 0, 0, t, ε) (Q, P)
+∂(Q,P )∂H
ˆF(0, 0, 0, t, ε)(H, (Q, P)) + 1
2 ∂2
(Q,P )
ˆF(0, 0, 0, t, ε) (Q, P)
[2]
+A4,1((Q, P) , H, t, ε)(H[2]
, (Q, P)) + A4,2((Q, P) , H, t, ε)(H, (Q, P)
[2]
)
+A4,3((Q, P) , H, t, ε) (Q, P)
[3]
where the maps A4,1, A4,2 and A4,3 are of class Cr+4
and 2π–periodic with respect to ϕ. Hence
we rewrite ˆF(Φ(ϕ, h), H, t, ε) as follows:
ˆF(Φ(ϕ, h), H, t, ε) = ∂(Q,P )
ˆF(0, 0, 0, t, ε) Φ(ϕ, h) (1.126)
+∂(Q,P )∂H
ˆF(0, 0, 0, t, ε)(H, Φ(ϕ, h)) + 1
2 ∂2
(Q,P )
ˆF(0, 0, 0, t, ε) Φ(ϕ, h)[2]
+A4,1(Φ(ϕ, h), H, t, ε)(H[2]
, Φ(ϕ, h)) + A4,2(Φ(ϕ, h), H, t, ε)(H, Φ(ϕ, h)
[2]
)
+A4,3(Φ(ϕ, h), H, t, ε) Φ(ϕ, h)[3]
.
7. With ˆG(0, 0, 0, t, ε) = 0, a similar representation is found for ˆG(Φ(ϕ, h), H, t, ε):
ˆG(Φ(ϕ, h), H, t, ε) = ∂(Q,P )
ˆG(0, 0, 0, t, ε) Φ(ϕ, h) + ∂H
ˆG(0, 0, 0, t, ε) H (1.127)
+A5,0(Φ(ϕ, h), H, t, ε) H[2]
+ A5,1(Φ(ϕ, h), H, t, ε)(H, Φ(ϕ, h))
+A5,2(Φ(ϕ, h), H, t, ε) Φ(ϕ, h)
[2]
where the maps A5,2, A5,1 and A5,0 are 2π–periodic with respect to ϕ.
8. Summarizing the representations (1.119), (1.123), (1.125) and (1.126) we rewrite the term presented
in (1.110) as follows
ω(h)
d
dh
H(0,P(h))
J ∂hΦ(ϕ, h) ˆF (Φ(ϕ, h), H, t, ε) =
Ω0 + P(h)2 A0(P(h))
d
dh
P(h) P(h) A3(P(h))
J d
dh
P(h) Φ
,1
(ϕ) + 3 d
dh
P(h) P(h)
2
A1(ϕ, P(h)) + d
dh
P(h) P(h)
3
∂p0 A1(ϕ, P(h)) · · ·
· · · P(h) ∂(Q,P )
ˆF (0, 0, 0, t, ε) Φ
,1
(ϕ) + P(h)
2
A1(ϕ, P(h)) + P(h) ∂(Q,P )∂H
ˆF (0, 0, 0, t, ε) H, Φ
,1
(ϕ) + P(h)
2
A1(ϕ, P(h))
+ P(h)
2 1
2
∂
2
(Q,P )
ˆF (0, 0, 0, t, ε) Φ
,1
(ϕ) + P(h)
2
A1(ϕ, P(h))
[2]
+ P(h) A4,1(Φ(ϕ, h), H, t, ε) H
[2]
, Φ
,1
(ϕ) + P(h)
2
A1(ϕ, P(h))
+ P(h)
2
A4,2(Φ(ϕ, h), H, t, ε) H, Φ
,1
(ϕ) + P(h)
2
A1(ϕ, P(h))
[2]
+ P(h)
3
A4,3(Φ(ϕ, h), H, t, ε) Φ
,1
(ϕ) + P(h)
2
A1(ϕ, P(h))
[3]
=:
Ω0
A3(0)
· · ·
· · · JΦ
,1
(ϕ) ∂(Q,P )
ˆF (0, 0, 0, t, ε) Φ
,1
(ϕ) + ∂(Q,P )∂H
ˆF (0, 0, 0, t, ε) H, Φ
,1
(ϕ) + A4,1(Φ(ϕ, h), H, t, ε) H
[2]
, Φ
,1
(ϕ)
+ P(h) JΦ
,1
(ϕ) 1
2
∂
2
(Q,P )
ˆF (0, 0, 0, t, ε) Φ
,1
(ϕ)
[2]
+ A4,2(Φ(ϕ, h), H, t, ε) H, Φ
,1
(ϕ)
[2]
+ P(h)
2
A6(ϕ, P(h), H, t, ε)](https://image.slidesharecdn.com/134355b9-c3ce-41ca-8cf9-85f751f98ea6-160201091932/85/Invariant-Manifolds-Passage-through-Resonance-Stability-and-a-Computer-Assisted-Application-to-a-Synchronous-Motor-60-320.jpg)
![1.5. The Action Angle Coordinates 47
which eventually leads to the representation claimed in (1.115). As a further consequence of this
form we conclude that the map F2 is of class Cr+4
with respect to h.
9. Summarizing the representations (1.124), (1.125) and (1.126) we rewrite F3 defined in (1.110) as
follows
1
d
dh
H(0,P(h))
∇H(Φ(ϕ, h)) ˆF (Φ(ϕ, h), H, t, ε) =
1
d
dh
P(h) P(h) A3(P(h))
P(h) H
,1
(ϕ) + P(h)
3
A2(ϕ, P(h)) · · ·
· · · P(h) ∂(Q,P )
ˆF (0, 0, 0, t, ε) Φ
,1
(ϕ) + P(h)
2
A1(ϕ, P(h)) + P(h) ∂(Q,P )∂H
ˆF (0, 0, 0, t, ε) H, Φ
,1
(ϕ) + P(h)
2
A1(ϕ, P(h))
+ P(h)
2 1
2
∂
2
(Q,P )
ˆF (0, 0, 0, t, ε) Φ
,1
(ϕ) + P(h)
2
A1(ϕ, P(h))
[2]
+ P(h) A4,1(Φ(ϕ, h), H, t, ε) H
[2]
, Φ
,1
(ϕ) + P(h)
2
A1(ϕ, P(h))
+ P(h)
2
A4,2(Φ(ϕ, h), H, t, ε) H, Φ
,1
(ϕ) + P(h)
2
A1(ϕ, P(h))
[2]
+ P(h)
3
A4,3(Φ(ϕ, h), H, t, ε) Φ
,1
(ϕ) + P(h)
2
A1(ϕ, P(h))
[3]
=:
P(h)
d
dh
P(h) A3(0)
H
,1
(ϕ) ∂(Q,P )
ˆF (0, 0, 0, t, ε) Φ
,1
(ϕ) + ∂(Q,P )∂H
ˆF (0, 0, 0, t, ε)(H, Φ
,1
(ϕ)) + A4,1(Φ(ϕ, h), H, t, ε) H
[2]
, Φ
,1
(ϕ)
+
P(h)2
d
dh
P(h) A3(0)
H,1(ϕ) 1
2
∂2
(Q,P )
ˆF (0, 0, 0, t, ε) Φ,1(ϕ)[2] + A4,2(Φ(ϕ, h), H, t, ε) H, Φ,1(ϕ)[2]
+
P(h)3
d
dh
P(h) A3(0)
A7(ϕ, P(h), H, t, ε).
This implies the identity claimed in (1.116). Following the same way as for F2 one finds F3 to be
of class Cr+4
h as well.
The proof of (1.118) is carried out in a very similar way (using (1.127)) and therefore omitted.
It remains to establish that the maps F2, F3 are of class Cr+4
with respect to the remaining arguments
t, ϕ, H and ε. This however may be deduced from the formulae in definition 1.5.5 directly.
Let us conclude this section with the following remark on the situation where 0 ∈ J :
Remark 1.5.10 Consider the case 0 ∈ J . Then (1.96) implies that the representations (1.116), (1.118)
simplify to
F3(t, ϕ, 0, H, ε) = 0 ˆG(Φ(ϕ, 0), 0, t, ε) = 0. (1.128)
In this case the set {h = 0, H = 0} is therefore invariant with respect to (1.111).](https://image.slidesharecdn.com/134355b9-c3ce-41ca-8cf9-85f751f98ea6-160201091932/85/Invariant-Manifolds-Passage-through-Resonance-Stability-and-a-Computer-Assisted-Application-to-a-Synchronous-Motor-61-320.jpg)
![48 Chapter 1. Reduction to a Planar System
1.6 The Attractive Invariant Manifold
1.6.1 The Existence of an Attractive Invariant Manifold
In this section we establish the existence of a unique attractive invariant manifold for system (1.111) by
applying the following result by Nipp / Stoffer [13]:
Lemma 1.6.1 Consider a system of the form
d
ds x = f(x, y, ϑ)
d
ds y = g(x, y, ϑ)
(1.129)
where the maps f and g satisfy the following set of assumptions:
1.130 a. In the domain x ∈ Rn
, y ∈ Rm
, ϑ ∈ E ⊂ R the map f is of class BCr
(r > 0) and g has bounded
derivatives of order k = 1, . . . , r. There exists y0 ∈ Rm
such that the mapping (x, ϑ) → g(x, y0, ϑ)
is bounded uniformly. Moreover the following Lipschitz conditions hold:
|f(x, y1, ϑ1) − f(x, y2, ϑ2)| ≤ L1,2 |y1 − y2| + L1,3 |ϑ1 − ϑ2|
|g(x1, y, ϑ1) − g(x2, y, ϑ2)| ≤ L2,1 |x1 − x2| + L2,3 |ϑ1 − ϑ2| .
1.130 b. There exist constants γ1 ∈ R, γ2 > 0 such that
µ (−∂xf(x, y, ϑ)) ≤ γ1 µ (∂yg(x, y, ϑ)) ≤ −γ2,
where µ (.) denotes the logarithmic norm.
1.130 c. 2 L1,2 L2,1 < γ2 − γ1
1.130 d. L1,2 L < γ2
1.130 e. (r + 1) L1,2 L < γ2 − r γ1
where L :=
2L2,1
γ2−γ1+
√
(γ2−γ1)2−4 L1,2 L2,1
.
Then for every ϑ ∈ E, system (1.129) admits a unique manifold Mϑ which may be respresented as a
graph of a mapping S, i.e.
Mϑ := (x, y) ∈ Rn+m
y = S(x, ϑ)
such that the following assertions hold:
1.131 a. S ∈ BCr
(Rn
× E, Rm
) and S ∞ := sup {|S(x, ϑ)| | x ∈ Rn
, ϑ ∈ E} < ̺.
1.131 b. Mϑ is invariant with respect to system (1.129) in the following sense:
For every initial condition (x0, y0) ∈ Mϑ the corresponding solution satisfies
(x, y)(s; x0, y0, ϑ) ∈ Mϑ ∀s ∈ R.](https://image.slidesharecdn.com/134355b9-c3ce-41ca-8cf9-85f751f98ea6-160201091932/85/Invariant-Manifolds-Passage-through-Resonance-Stability-and-a-Computer-Assisted-Application-to-a-Synchronous-Motor-62-320.jpg)
![1.6. The Attractive Invariant Manifold 49
1.131 c. Mϑ is attractive, i.e. there exist constants c0, c1 > 0 such that every solution of (1.129) with initial
value (x0, y0) ∈ Rm
satisfies
|y(s; x0, y0, ϑ) − S(x(s; x0, y0, ϑ), ϑ)| ≤ c0 e−c1 s
|y0 − S(x0, ϑ)|
for all s ≥ 0.
1.131 d. If f and g are ω ∈ Rn
–periodic with respect to x, then the map S is ω–periodic with respect to x.
1.131 e. Moreover if there exists a subset X ∈ Rn
such that X × {0} is invariant with respect to (1.129),
then S(x, ϑ) = 0 for all x ∈ X, ϑ ∈ E.
Using this result we will be in the position to establish the existence of an attractive invariant manifold
for system (1.111). We continue with the following remark on logarithmic norms :
Remark 1.6.2 Recall definition 1.4.5 of the logarithmic norm. Let us quote the following properties of
logarithmic norms, as found in [18] (Lemmata 1a, 1b and Corollary 2):
1. If the matrix M ∈ Rn×n
is diagonalizable then there exists a norm on Rn
such that the corresponding
logarithmic norm of M is given by the spectral abscissa, i.e.
µ (M) = max
i=1...n
{ℜ(λ) | λ ∈ σ(M)} .
2. Choosing the maximum norm on Rn
the logarithmic norm may be expressed as follows:
µ (M) = max
i=1...n
[M]i,i +
n
j=1
j=i
[M]i,j
. (1.132)
3. Choosing the euclidean norm on Rn
one has
µ (M) = max
|x|≤1
(x| M x) . (1.133)
4. µ(M + N) ≤ µ(M) + µ(N) for M, N ∈ Rn×n
.
5. µ(λ M) = λ µ(M) for any λ > 0, M ∈ Rn×n
.
Using these explicit representations of the logarithmic norms in particular cases and taking into ac-
count that (1.111) decouples if the perturbation parameter ε is zero, we prove a slight modification of
lemma 1.6.1: proposition 1.6.3 states this invariant manifold result in a form which is more convenient
for application in our situation.](https://image.slidesharecdn.com/134355b9-c3ce-41ca-8cf9-85f751f98ea6-160201091932/85/Invariant-Manifolds-Passage-through-Resonance-Stability-and-a-Computer-Assisted-Application-to-a-Synchronous-Motor-63-320.jpg)

![1.6. The Attractive Invariant Manifold 51
eq. (1.132) implies
µ (−∂xf(x, y, 0)) = max
i=1...n
ℜ [−∂xf(x, y, 0)]i,i +
n
j=1
j=i
[−∂xf(x, y, 0)]i,j
= max
i=1...n
−
κi
κi
P−1
Df0
(P ∆ x) P i,i
+ max
i=1...n
n
j=1
j=i
κj
κi
P−1
Df0
(P ∆ x) P i,j
≤ max
i=1...n
− P−1
Df0
(P ∆ x) P i,i
+ max
i=1...n
n
j=1
j=i
κj−i
P−1
N P i,j
and as P is a permutation matrix and P−1
N P is assumed to be of upper triangular form,
= max
i=1...n
− Df0
(P ∆ x) i,i
+ max
i=1...n
n
j=i+1
κj−i
P−1
N P i,j
≤ b2 + κ max
i=1...n
n
j=i+1
b1
≤ b2 + κ n b1.
3. If the second assumption is fulfilled, one may proceed in a similar way. Define
b0 := − max
|y|≤̺
µ Dg0
(y) , b1 := 0, b2 := max
|ξ|≤1
¯ξ∈Rn
− ξ| P−1
Df0
(¯ξ) P ξ .
Considering the euclidean norm on Rn
the representation (1.133) implies
µ (−∂xf(x, y, 0)) = max
|ξ|≤1
− ξ| P−1
Df0
(P x) P ξ
≤ max
|ξ|≤1
¯ξ∈Rn
− ξ| P−1
Df0
(¯ξ) P ξ
= b2.
4. Thus the inequalities
µ (−∂xf(x, y, 0)) ≤ b2 + κ n b1,
µ (∂yg(x, y, 0)) = µ Dg0
(y) ≤ max
|y|≤̺
µ Dg0
(y) = −b0
(1.136)
hold uniformly with respect to x ∈ Rn
, y ∈ Rm
and in both situations dealed with. Recall that
by assumption b0 > r b2.
5. Choose 0 < κ < min b0
r+1 , b0−r b2
2(r+1+r n b1) and define
γ1 := max {0, b2 + κ n b1} + κ γ2 := b0 − κ.
Then γ2 > 0 since 0 < κ < b0 and
µ (−∂xf(x, y, 0)) ≤ b2 + κ n b1 < max {0, b2 + κ n b1} + κ = γ1](https://image.slidesharecdn.com/134355b9-c3ce-41ca-8cf9-85f751f98ea6-160201091932/85/Invariant-Manifolds-Passage-through-Resonance-Stability-and-a-Computer-Assisted-Application-to-a-Synchronous-Motor-65-320.jpg)




![56 Chapter 1. Reduction to a Planar System
Remark 1.6.6 It then follows that the m–th component (m = 1, 2, 3) of F may be written in the form
Fm(t, ϕ, h, H, ε) = F0
m(h) +
j=1,2,3
l=0,1,2
εj
Fj,l
m (t, ϕ, h) H[l]
+ O(ε4
) + O(ε H[3]
).
Taking into account that the maps Φ and ˆF are 2π–periodic with respect to ϕ (and t), we see that the
same must be true for the maps Fj,l
m (t, ϕ, h) defined above. Thus we may consider the Fourier series of
these maps. As shown in (1.93) the Fourier expansions of ˆFj
, ˆGj
with respect to the time t are finite8
and more specifically,
Fm(t, ϕ, h, H, ε) = F0
m(h) +
j=1,2,3
l=0,1,2
|n|≤N
k∈Z
εj
Fj,l
k,n,m(h) H[l]
ei(kϕ+nt)
+ O(ε4
) + O(ε H[3]
). (1.142)
A similar process may be carried out for the map G yielding
G(t, ϕ, h, H, ε) = A H +
j=1,2
l=0,1
|n|≤N
k∈Z
εj
Gj,l
k,n(h) H[l]
ei(kϕ+nt)
+ O(ε3
) + O(ε H[2]
). (1.143)
These representations (1.142), (1.143) will be used in section 1.6.4 as well. It now is possible to derive a
sufficiently explicit representation for the map S in terms of the quantities Gj,l
k,n(h). This is the subject
of the following proposition.
Proposition 1.6.7 The map S given by corollary 1.6.4 may be written in the following form:
S(t, ϕ, h, ε) =
2
j=1 |n|≤jN
k∈Z
εj
Sj
k,n(h) ei(kϕ+nt)
+ ε3
S3
(t, ϕ, h, ε). (1.144)
The map S3
is 2π–periodic with respect to the variables t and ϕ and of class BCr+1
. The maps Sj
k,n are
of class BCr+1
as well and given by the following identities9
:
S1
k,n(h) = [i(k ω(h) + n)IRd − A]
−1
G1,0
k,n(h)
S2
k,n(h) = [i(k ω(h) + n)IRd − A]
−1
G2,0
k,n(h) +
k1,k2∈Z
k1+k2=k
|n1|,|n2|≤N
n1+n2=n
G1,1
k1,n1
(h) S1
k2,n2
(h)
−
k1,k2∈Z
k1+k2=k
|n1|,|n2|≤N
n1+n2=n
i k1 S1
k1,n1
(h) F1,0
k2,n2,2(h) + ∂hS1
k1,n1
(h) F1,0
k2,n2,3(h) .
PROOF: As the maps S ∈ BCr+4
(R3
× (−ε3, ε3), Rd
) are (at least) of class C4
with respect to ε, we
may write S in the form
S(t, ϕ, h, ε) =
2
j=1
εj
Sj
(t, ϕ, h) + ε3
S3
(t, ϕ, h, ε), (1.145)
8For simplicity let us denote the limit of the indices n arising in GA 1.3 when considering ˆF instead of F by N again.
9For the application in chapter 4 it suffices to consider the explicit formula given for S1
k,n(h).](https://image.slidesharecdn.com/134355b9-c3ce-41ca-8cf9-85f751f98ea6-160201091932/85/Invariant-Manifolds-Passage-through-Resonance-Stability-and-a-Computer-Assisted-Application-to-a-Synchronous-Motor-70-320.jpg)



![60 Chapter 1. Reduction to a Planar System
+ 1
2 P(h) 1
ν J Φ,1
(ϕ) ∂2
(Q,P )
ˆF(0, 0, 0, t, ε) Φ,1
(ϕ)[2]
+ P(h)2 ˜f,,2
(ϕ, P(h), S(t, ϕ, h, ε), t, ε) S,1
(t, ϕ, ε) + P(h) S,2
(t, ϕ, P(h), ε)
[2]
+ P(h)
2 ˜f,,1
(ϕ, P(h), S(t, ϕ, h, ε), t, ε) S,1
(t, ϕ, ε) + P(h) S,2
(t, ϕ, P(h), ε)
+ P(h)2 ˜f,,0
(ϕ, P(h), S(t, ϕ, h, ε), t, ε),
as well as
F3(t, ϕ, h, S(t, ϕ, h, ε), ε) = P(h)
d
dh P(h)
1
∂2
p H(0,0) H,1
(ϕ) ∂(Q,P )
ˆF(0, 0, 0, t, ε) Φ,1
(ϕ)
+ P(h)2
d
dh P(h)
1
∂2
pH(0,0) H,1
(ϕ) ∂(Q,P )∂H
ˆF(0, 0, 0, t, ε)(S,1
(t, ϕ, ε), Φ,1
(ϕ))
+ P(h)3
d
dh P(h)
1
∂2
p H(0,0) H,1
(ϕ) ∂(Q,P )∂H
ˆF(0, 0, 0, t, ε)(S,2
(t, ϕ, P(h), ε), Φ,1
(ϕ))
+ 1
2
P(h)2
d
dh P(h)
1
∂2
p H(0,0) H,1
(ϕ) ∂2
(Q,P )
ˆF(0, 0, 0, t, ε) Φ,1
(ϕ)[2]
+ P(h)3
d
dh P(h)
˜g,,2
(ϕ, P(h), S(t, ϕ, h, ε), t, ε) S,1
(t, ϕ, ε) + P(h) S,2
(t, ϕ, P(h), ε)
[2]
+ P(h)3
d
dh P(h)
˜g,,1
(ϕ, P(h), S(t, ϕ, h, ε), t, ε) S,1
(t, ϕ, ε) + P(h) S,2
(t, ϕ, P(h), ε)
+ P(h)3
d
dh P(h)
˜g,,0
(ϕ, P(h), S(t, ϕ, h, ε), t, ε).
In much the same way, (1.118) reads
ˆG(Φ(ϕ, h), S(t, ϕ, h, ε), t, ε) = P(h) ∂(Q,P )
ˆG(0, 0, 0, t, ε) Φ,1
(ϕ)
+ P(h) ∂H
ˆG(0, 0, 0, t, ε) S,1
(t, ϕ, ε) + P(h)
2
∂H
ˆG(0, 0, 0, t, ε) S,2
(t, ϕ, P(h), ε)
+ P(h)
2 ˜h,,2
(ϕ, P(h), S(t, ϕ, h, ε), t, ε) S,1
(t, ϕ, ε) + P(h) S,2
(t, ϕ, P(h), ε)
[2]
+ P(h)
2 ˜h,,1
(ϕ, P(h), S(t, ϕ, h, ε), t, ε) S,1
(t, ϕ, ε) + P(h) S,2
(t, ϕ, P(h), ε)
+ P(h)2 ˜h,,0
(ϕ, P(h), S(t, ϕ, h, ε), t, ε).
Sorting these expressions by powers of P(h) yields
F2(t, ϕ, h, S(t, ϕ, h, ε), ε) = Ω0 + 1
ν J Φ,1
(ϕ) ∂(Q,P )
ˆF(0, 0, 0, t, ε) Φ,1
(ϕ)
+ P(h) 1
ν J Φ,1
(ϕ) ∂(Q,P )∂H
ˆF(0, 0, 0, t, ε) S,1
(t, ϕ, ε), Φ,1
(ϕ)
+ 1
2
1
ν J Φ,1
(ϕ) ∂2
(Q,P )
ˆF(0, 0, 0, t, ε) Φ,1
(ϕ)[2]
+ O(P(h)
2
) (1.152)
F3(t, ϕ, h, S(t, ϕ, h, ε), ε) = P(h)
d
dh P(h)
1
∂2
p H(0,0) H,1
(ϕ) ∂(Q,P )
ˆF(0, 0, 0, t, ε) Φ,1
(ϕ)
+ P(h)2
d
dh P(h)
1
∂2
pH(0,0) H,1
(ϕ) ∂(Q,P )∂H
ˆF(0, 0, 0, t, ε)(S,1
(t, ϕ, ε), Φ,1
(ϕ)) + O(P(h)
3
) (1.153)](https://image.slidesharecdn.com/134355b9-c3ce-41ca-8cf9-85f751f98ea6-160201091932/85/Invariant-Manifolds-Passage-through-Resonance-Stability-and-a-Computer-Assisted-Application-to-a-Synchronous-Motor-74-320.jpg)


![1.6. The Attractive Invariant Manifold 63
the representations (1.152) and (1.153)
˙ϕ = Ω0 + 1
ν J Φ,1
(ϕ) ∂(Q,P )
ˆF(0, 0, 0, t, ε) Φ,1
(ϕ)
+ P(h) 1
ν J Φ,1
(ϕ) ∂(Q,P )∂H
ˆF(0, 0, 0, t, ε) S,1
(t, ϕ, ε), Φ,1
(ϕ)
+ 1
2
1
ν J Φ,1
(ϕ) ∂2
(Q,P )
ˆF(0, 0, 0, t, ε) Φ,1
(ϕ)[2]
+ P(h)
2
f,2
(t, ϕ, P(h), ε)
˙h = P(h)
d
dh P(h)
1
∂2
p H(0,0) H,1
(ϕ) ∂(Q,P )
ˆF(0, 0, 0, t, ε) Φ,1
(ϕ)
+ P(h)2
d
dh P(h)
1
∂2
p H(0,0) H,1
(ϕ) ∂(Q,P )∂H
ˆF(0, 0, 0, t, ε)(S,1
(t, ϕ, ε), Φ,1
(ϕ))
+ 1
2
1
∂2
pH(0,0) H,1
(ϕ) ∂2
(Q,P )
ˆF(0, 0, 0, t, ε) Φ,1
(ϕ)[2]
+ P(h)3
d
dh P(h)
g,3
(t, ϕ, P(h), ε).
(1.157)
Here we have use the representation ω(h) = Ω0 + O(P(h)
2
) as derived in (1.119).
Let us summarize these results in the following lemma:
Lemma 1.6.9 The reduced system (1.155) may be written in the form
˙ϕ = ω(h) + f(t, ϕ, h, ε)
˙h = g(t, ϕ, h, ε)
(1.158)
and admits the epsilon / Fourier–expansion
˙ϕ = ω(h) +
3
j=1
εj
|n|≤3N
k∈Z
fj
k,n(h) ei(kϕ+nt)
+ ε4
f4
(t, ϕ, h, ε)
˙h =
3
j=1
εj
|n|≤3N
k∈Z
gj
k,n(h) ei(kϕ+nt)
+ ε4
g4
(t, ϕ, h, ε)
(1.159)
as well as the h–expansion
˙ϕ = Ω0 + f,0
(t, ϕ, ε) + P(h) f,1
(t, ϕ, ε) + P(h)
2
f,2
(t, ϕ, P(h), ε)
˙h = P(h)
d
dh P(h)
g,1
(t, ϕ, ε) + P(h)2
d
dh P(h)
g,2
(t, ϕ, ε) + P(h)3
d
dh P(h)
g,3
(t, ϕ, P(h), ε),
(1.160)
where the maps fj,l
, gj,l
are of class BCr
with respect to all arguments.
In the next two chapters we will discuss systems of this general form. We complete this first chapter by
stating some additional properties of the systems (1.159), (1.160) respectively.](https://image.slidesharecdn.com/134355b9-c3ce-41ca-8cf9-85f751f98ea6-160201091932/85/Invariant-Manifolds-Passage-through-Resonance-Stability-and-a-Computer-Assisted-Application-to-a-Synchronous-Motor-77-320.jpg)

![1.6. The Attractive Invariant Manifold 65
f,1
(t, ϕ, ε) = cos2
(ϕ) 1
ν ∂P ∂H
ˆFq(0, 0, 0, t, ε) − sin2
(ϕ) ν ∂Q∂H
ˆFp(0, 0, 0, t, ε)
+ cos(ϕ) sin(ϕ) ∂Q∂H
ˆFq(0, 0, 0, t, ε) − ∂P ∂H
ˆFp(0, 0, 0, t, ε) S,1
(t, ϕ, ε)
+ 1
2 cos3
(ϕ) 1
ν ∂2
P
ˆFq(0, 0, 0, t, ε) − 1
2 sin3
(ϕ) ν2
∂2
Q
ˆFp(0, 0, 0, t, ε)
+ cos2
(ϕ) sin(ϕ) ∂Q∂P
ˆFq(0, 0, 0, t, ε) − 1
2 ∂2
P
ˆFp(0, 0, 0, t, ε)
+ ν cos(ϕ) sin2
(ϕ) 1
2 ∂2
Q
ˆFq(0, 0, 0, t, ε) − ∂Q∂P
ˆFp(0, 0, 0, t, ε)
(1.163)
g,2
(t, ϕ, ε) = cos2
(ϕ) ∂P ∂H
ˆFp(0, 0, 0, t, ε) + sin2
(ϕ) ∂Q∂H
ˆFq(0, 0, 0, t, ε)
+ cos(ϕ) sin(ϕ) 1
ν ∂P ∂H
ˆFq(0, 0, 0, t, ε) + ν ∂Q∂H
ˆFp(0, 0, 0, t, ε) S,1
(t, ϕ, ε)
+ 1
2 cos3
(ϕ) ∂2
P
ˆFp(0, 0, 0, t, ε) + 1
2 ν sin3
(ϕ) ∂2
Q
ˆFq(0, 0, 0, t, ε)
+ cos2
(ϕ) sin(ϕ) ν ∂Q∂P
ˆFp(0, 0, 0, t, ε) + 1
2
1
ν ∂2
P
ˆFq(0, 0, 0, t, ε)
+ cos(ϕ) sin2
(ϕ) 1
2 ν2
∂2
Q
ˆFp(0, 0, 0, t, ε) + ∂Q∂P
ˆFq(0, 0, 0, t, ε) .
(1.164)
PROOF: As we will, for convenience, write
ˆF(Q, P, H, t, ε) =
ˆFq(Q, P, H, t, ε)
ˆFp(Q, P, H, t, ε)
,
it then is found that for any vectors
x
y
∈ R2
, H ∈ Rd
,
∂(Q,P )
ˆF(0, 0, 0, t, ε)
x
y
=
x ∂Q
ˆFq(0, 0, 0, t, ε) + y ∂P
ˆFq(0, 0, 0, t, ε)
x ∂Q
ˆFp(0, 0, 0, t, ε) + y ∂P
ˆFp(0, 0, 0, t, ε)
∂(Q,P )∂H
ˆF(0, 0, 0, t, ε) H,
x
y
=
x ∂Q∂H
ˆFq(0, 0, 0, t, ε) + y ∂P ∂H
ˆFq(0, 0, 0, t, ε) H
x ∂Q∂H
ˆFp(0, 0, 0, t, ε) + y ∂P ∂H
ˆFp(0, 0, 0, t, ε) H
∂2
(Q,P )
ˆF(0, 0, 0, t, ε)
x
y
[2]
=
x2
∂2
Q
ˆFq(0, 0, 0, t, ε) + 2 x y ∂Q∂P
ˆFq(0, 0, 0, t, ε) + y2
∂2
P
ˆFq(0, 0, 0, t, ε)
x2
∂2
Q
ˆFp(0, 0, 0, t, ε) + 2 x y ∂Q∂P
ˆFp(0, 0, 0, t, ε) + y2
∂2
P
ˆFp(0, 0, 0, t, ε)
.](https://image.slidesharecdn.com/134355b9-c3ce-41ca-8cf9-85f751f98ea6-160201091932/85/Invariant-Manifolds-Passage-through-Resonance-Stability-and-a-Computer-Assisted-Application-to-a-Synchronous-Motor-79-320.jpg)





![2.2. Near Identity Transformations, Small Denominators and Averaging 71
2.2 Near Identity Transformations, Small Denominators and
Averaging
In this section we will discuss the possibility to apply near identity transformations on the action variable
h such that the resulting representation of (2.1) is easier to discuss qualitatively. We will see that it is
possible to remove the Fourier coefficient maps gj
k,n for all ”frequencies” −n
k up to at most one resonant
frequency. Due to small denominators in the transformations applied, it will not be possible to remove
the terms corresponding to this resonant frequency on the entire domain h ∈ R but only outside an
O(ε)–neighbourhood of the corresponding resonance.
The process carried out to remove the non–resonant terms is inspired by the standard way of averaging.
However we will not drop higher order terms but consider the entire transformed system. Hence we will
not have to discuss the error made by approximating the original system by the averaged system (see
e.g. section 11.3.1 in [11]). On the other hand, it will be necessary to work out these terms of the vector
field which determine the qualitative behaviour and to control the size of the remaining ”perturbation”
terms.
2.2.1 On Resonances and Small Denominators
In this first section we define the notion of resonance and prepare the procedure of averaging by giving
crucial estimates on small denominators.
Lemma 2.2.1 Define the distance d(h) between the frequency ω(h) and the set R of resonant frequencies
by
d(h) := dist(ω(h), R) = min
1≤m≤M
|ω(h) − ω(hm)| . (2.3)
Then d ∈ C(R, R) and d(h) = 0 for all h ∈ H. Moreover there exists a constant c1 ∈ (0, 1] such that
d(h) ≥ c1 min
1≤m≤M
{1, |h − hm|} (2.4)
for all h ∈ R.
h
ωmax
ωmin
ω( )h
hm
m
h
d(h)
ω( )
❂ ❂❂❂
ω( )
ωmax
h
m
ω( )
h
hm
minω
❂ ❂ ❂ ❂❂ ❂ ❂ h
d(h)
❂
Figure 2.1: Two examples for the map ω together with sets R, H and the plot of d(h).](https://image.slidesharecdn.com/134355b9-c3ce-41ca-8cf9-85f751f98ea6-160201091932/85/Invariant-Manifolds-Passage-through-Resonance-Stability-and-a-Computer-Assisted-Application-to-a-Synchronous-Motor-85-320.jpg)

![2.2. Near Identity Transformations, Small Denominators and Averaging 73
Lemma 2.2.2 There exist constants ̺ ∈ (0, 1] , c2 ≥ 1 such that the open balls BR(hm, ̺), 1 ≤ m ≤ M
are disjoint and for every (k, n) ∈ Z (k = 0) the following estimates are true:
2.5 a. If −n
k ∈ R, h ∈ R, then
1
|k ω(h) + n|
≤ c2
2.5 b. If −n
k ∈ R, h ∈ R H, then
1
|k ω(h) + n|
≤
c2
d(h)
2.5 c. If for 1 ≤ m ≤ M fixed, −n
k ∈ R {ω(hm)} and h ∈ BR(hm, ̺) then
1
|k ω(h) + n|
≤ c2.
(i.e. if h is near a resonance hm and −n
k
is a resonant frequency corresponding to a different resonance
then the denominator |k ω(h) + n| is bounded uniformly from below.)
PROOF:
a) Since −n
k ∈ R it follows from the definition of R that either of the following two cases apply:
1.) −n
k < ωmin: using GA 2.3 we have
ω(h) +
n
k
= ω(h) −
−n
k
≥ ωmin −
−n
k
= ωmin +
n
k
≥ inf ωmin +
n
k
, ωmax +
n
k
(k, n) ∈ Z =: b0 > 0
and hence
|k ω(h) + n| = |k| ω(h) +
n
k
≥ ω(h) +
n
k
≥ b0.
2.) ωmax < −n
k : in a very similar way we find
|k ω(h) + n| ≥ ω(h) +
n
k
=
−n
k
− ω(h) ≥
−n
k
− ωmax = ωmax +
n
k
≥ b0.
b) If −n
k ∈ R then there exists hm ∈ H such that −n
k = ω(hm), hence
|k ω(h) + n| = |k| ω(h) +
n
k
= |k| |ω(h) − ω(hm)| ≥ d(h).
By assumption h ∈ H hence d(h) = 0 which implies
1
|k ω(h) + n|
≤
1
d(h)
.
c) Setting
˜̺ := 1
3 min {|hm − h ¯m| |1 ≤ m, ¯m ≤ M, m = ¯m}
the open balls BR(hm, ˜̺) are disjoint. Using this quantity ˜̺ we define
1
b3
:= min {|q − ¯q| | q, ¯q ∈ R, q = ¯q}
̺ := min 1, ˜̺,
1
2 b3 max d
dh ω(h) h ∈ BR(hm, ˜̺), 1 ≤ m ≤ M
.](https://image.slidesharecdn.com/134355b9-c3ce-41ca-8cf9-85f751f98ea6-160201091932/85/Invariant-Manifolds-Passage-through-Resonance-Stability-and-a-Computer-Assisted-Application-to-a-Synchronous-Motor-87-320.jpg)




![78 Chapter 2. Averaging and Passage through Resonance in Plane Systems
2.2.2 The Application of Particular Near Identity Transformations
We now are in the position to introduce the change of coordinates announced and to calculate the
transformed vector field. The following lemma summarizes the results found in section 2.2.1 and provides
the tools needed to prove an important result of this chapter given in proposition 2.2.7.
Lemma 2.2.6 Assume we are given an integer p ∈ {0, 1}, a constant c5 > 0, a set J ⊂ Z and a family
Iε,δ of subsets of R where (ε, δ) are in a subset of [−1, 1] × R∗
+ and assume that there exists a function
b(ε, δ) such that the following statements are true:
2.14 a. For all (k, n) ∈ J, h ∈ Iε,δ the estimate 1
|k ω(h)+n| ≤ b(ε, δ) applies.
2.14 b. Iε,δ is a finite union of open intervals Il,ε,δ, l = 1, . . . , L where the closures Il,ε,δ are disjoint.
For cI(ε, δ) as defined in (2.11) the estimates 2 ε2
c4 b(ε, δ) ≤ cI(ε, δ) and
2 ε2
c4 b(ε, δ) (1 + b(ε, δ)) ≤ 1
2 are true.
2.14 c. The quantities |ε|
δ
2 (1−p)
b(ε, δ) (1 + b(ε, δ)), |ε|
δ
1−p
b(ε, δ) and δ |ε|
δ
p
are bounded by c5.
Then the map u(t, ϕ, h, ε) := ε2
u2
(t, ϕ, h) + ε3
u3
(t, ϕ, h) where
uj
(t, ϕ, h) :=
(k,n)∈J
−gj
k,n(h)
i(k ω(h) + n)
ei(kϕ+nt)
j = 2, 3 (2.15)
satisfies all assumptions made in lemma 2.2.5. The near identity change of coordinates ¯h = h+u(t, ϕ, h, ε)
defined as in (2.12) transforms (2.1) into the system
˙ϕ = ω(¯h + v(t, ϕ, ¯h, ε)) +
3
j=2 k,n∈Z
εj
fj
k,n(¯h) ei(kϕ+nt)
+ ε3+p
δ1−p ¯f3
(t, ϕ, ¯h, ε, δ) + ε4 ¯f4
(t, ϕ, ¯h, ε)
˙¯h =
3
j=2 (k,n)∈Jc
εj
gj
k,n(¯h) ei(kϕ+nt)
+ ε2 (1+p)
δ2 (1−p)
¯g2
(t, ϕ, ¯h, ε, δ)
+ ε3+p
δ1−p
¯g3
(t, ϕ, ¯h, ε, δ) + ε4
¯g4
(t, ϕ, ¯h, ε),
(2.16)
where v is the map satisfying h = ¯h + v(t, ϕ, ¯h, ε) (cf. lemma 2.2.5) and Jc
= {(k, n) ∈ Z | (k, n) ∈ J}.
The functions fj
k,n, ¯fj
, gj
k,n and ¯gj
are bounded by a constant B∞(b∞, c3, c4, c5), uniformly with respect
to t, ϕ, ¯h ∈ U.
Finally, the following special cases apply:
2.17 a. if f2
k,n = 0 for all (k, n) ∈ Z2
then ¯f3
= 0
2.17 b. if g2
k,n = 0 for all (k, n) ∈ J then ¯g2
= 0.](https://image.slidesharecdn.com/134355b9-c3ce-41ca-8cf9-85f751f98ea6-160201091932/85/Invariant-Manifolds-Passage-through-Resonance-Stability-and-a-Computer-Assisted-Application-to-a-Synchronous-Motor-92-320.jpg)






![2.2. Near Identity Transformations, Small Denominators and Averaging 85
transformed system takes the form
˙ϕ = ω(¯h + vI
(t, ϕ, ¯h, ε)) +
3
j=2 k,n∈Z
εj
fj
k,n(¯h) ei(kϕ+nt)
+ ε4 ¯f3
(t, ϕ, ¯h, ε) + ε4 ¯f4
(t, ϕ, ¯h, ε)
˙¯h = ε2
g2
0,0(¯h) + ε2
l∈N∗
g2
lkm,lnm
(¯h) eil(kmϕ+nmt)
+ ε3
g3
0,0(¯h) + ε3
l∈N∗
g3
lkm,lnm
(¯h) eil(kmϕ+nmt)
+ ε4
¯g2
(t, ϕ, ¯h, ε) + ε4
¯g3
(t, ϕ, ¯h, ε) + ε4
¯g4
(t, ϕ, ¯h, ε),
(2.25)
where the integers nm < 0 < km have no common divisor and −nm
km
= ω(hm).
The function uI
in the transformation ¯h = h + uI
(t, ϕ, h, ε) is of size O(ε2
). More precisely there
exists a constant c6 > 0 such that the ”inverse mapping” vI
of uI
satisfies
vI
(t, ϕ, ¯h, ε) ≤ ε2
c6 (2.26)
uniformly with respect to t, ϕ, ¯h ∈ UI
:= t, ϕ, ¯h ∈ R3 ¯h = h + uI
(t, ϕ, h, ε), h ∈ II
ε,δ . The
functions fj
k,n, ¯fj
, gj
k,n and ¯gj
are of class C2
with respect to t, ϕ ∈ R and h ∈ BR(hm, ̺).
Moreover we recall the following statement proved in lemma 2.2.6 which is true in both situations:
if f2
k,n = 0 for all (k, n) ∈ Z2
then ¯f3
= 0 and similarly
if g2
k,n = 0 for all (k, n) ∈ Jj, then ¯g2
= 0.
Note however, that the functions ¯fj
, ¯gj
in the two situations listed above are not identical.
PROOF: Without loss of generality we may assume that ε = 0. (In the case were ε = 0 system (2.1)
may be discussed directly). In a first step we consider the two cases listed in the statement separately:
1. p = 0, IO
ε,δ = R
M
m=1
BR(hm, |ε|
δ ) and JO
= Z {(0, 0)} :
Let ̺, c1 ∈ (0, 1], c2 ≥ 1 and c4 denote the constants introduced in lemmata 2.2.1, 2.2.2 and 2.2.4
and define δ∞ := min 1, c1
3 c2 c4
, c1√
8 c4 c2
, εO
(δ) := min 1, 1
4 δ ̺ as well as bO
(ε, δ) := c2
c1
δ
|ε| . We
establish the assumptions made in lemma 2.2.6:
(a) The estimate (2.4) together with |ε|
δ ≤ 1
4 ̺ < 1 yields
d(h) ≥ c1 min
1≤m≤M
{1, |h − hm|} ≥ c1 min 1,
|ε|
δ
= c1
|ε|
δ
(2.27)
for every h ∈ IO
ε,δ. Since (0, 0) ∈ JO
and 1 < δ
|ε| ̺ ≤ δ
|ε| ≤ δ
|ε|
1
c1
we find by lemma 2.2.2
1
|k ω(h) + n|
≤ c2 max 1,
1
d(h)
≤ c2 max 1,
δ
|ε| c1
=
c2
c1
δ
|ε|
= bO
(ε, δ).
This verifies assumption (2.14 a).](https://image.slidesharecdn.com/134355b9-c3ce-41ca-8cf9-85f751f98ea6-160201091932/85/Invariant-Manifolds-Passage-through-Resonance-Stability-and-a-Computer-Assisted-Application-to-a-Synchronous-Motor-99-320.jpg)

![2.2. Near Identity Transformations, Small Denominators and Averaging 87
Together with
δ
|ε|
δ
p
≤ 1
assumption (2.14 b) may be established by setting
c5 := max 1, 2
c2
c1
2
.
It remains to prove the explicit representations given for the transformed right–hand side. In the first
situation it is easy to see that (JO
)c
= {(0, 0)} and by consequence of the statements given in lemma 2.2.6
the transformed system takes the form (2.23). In the second situation we take into account that
(JI
)
c
= {(k, n) ∈ Z | (k, n) ∈ JI
}
= (k, n) ∈ Z | (k, n) = (0, 0) or
−n
k
= ω(hm)
= {(k, n) ∈ Z | k ω(hm) + n = 0} .
Hence (JI
)
c
may be represented in the form
{(k, n) ∈ Z | ∃ l ∈ Z : (k, n) = l (km, nm)}
where the integers nm < 0 < km have no common divisor. Applying lemma 2.2.6 we see that (2.16) takes
the form stated in (2.25).
In the second situation, the denominators arising in (2.15) are bounded uniformly by c2. Thus the map
uI
is of class Cr
. As r ≥ 3 the regularity of order C2
claimed may be shown in a straightforward proof.
We eventually recall the estimate (2.18) which in this case of bI
(ε, δ) = c2 implies |u(t, ϕ, h, ε)| = O(ε2
)
at once. The corresponding claim on v follows by lemma 2.2.5.
Remark 2.2.8 Note that choosing any 0 < δ ≤ δ∞ and ε ∈ R such that |ε|
δ < ̺, the outer and inner
regions IO
ε,δ = R
M
m=1
BR(hm, |ε|
δ ) and II
ε,δ = BR(hm, ̺) are overlapping. However, for the discussion of
system (2.25) it is sufficient to consider an appropriate O(ε)–neighbourhood of the resonance hm. More
precisely we will aim on the discussion of solutions of (2.25) with initial values h(t0) ∈ BR(hm, 2 |ε|
δ ).
Due to some technical reasons the discussion in section 2.3.2 starts with BR(hm, 4 |ε|
δ ), however. The
parameter δ first will be fixed in the discussion of the outer region (cf. section 2.3.1).
Systems of the form (2.1) considered here may be understood as systems with two angle coordinates (t, ϕ)
where d
dt t = 1 and there exist only finitely many resonances. In this special case we have just shown, that
a simple transformation reduces the discussion of the entire system to the analysis of the leading Fourier
coefficients of the vector field.
Following this way it is not necessary to calculate an approximation of the solutions, using the inner,
outer and inner–outer asymptotic expansions and matching these expansions as proposed in many works
(cf. e.g. [17]).](https://image.slidesharecdn.com/134355b9-c3ce-41ca-8cf9-85f751f98ea6-160201091932/85/Invariant-Manifolds-Passage-through-Resonance-Stability-and-a-Computer-Assisted-Application-to-a-Synchronous-Motor-101-320.jpg)
![88 Chapter 2. Averaging and Passage through Resonance in Plane Systems
2.3 The Discussion of the Transformed Systems
Depending on the size and the sign of the Fourier–coefficient maps g2
0,0, g2
lkm,lnm
in the systems (2.23)
and (2.25) it is possible to draw conclusions on the asymptotic behaviour of solutions. These results then
may be carried over to system (2.1).
2.3.1 The Behaviour in the Outer Regions
In this subsection we treat system (2.23) on the ”outer regions” which are at most O(ε)–close to a
resonance. The following proposition considers the case of an existing ”minimal drift” on the set IO
ε,δ:
Proposition 2.3.1 Assume that there exists a constant c7 > 0 and that for ˇIε,δ ⊂ IO
ε,δ the estimate
g2
0,0(¯h) ≥ c7 holds for all h ∈ ˇIε,δ. Then δ > 0 may be choosen sufficiently small such that for
|ε| ≤ εO
(δ), every solution of (2.23) with initial value in ˇIε,δ tends towards the border ∂ ˇIε,δ.
More precisely if (ϕ, ¯h)(t; t0, ϕ0, ¯h0) denotes the solution of (2.23) with initial value (ϕ0, ¯h0) at time t = t0
where ¯h0 ∈ ˇIε,δ then
¯h(t; t0, ϕ0, ¯h0) − ¯h0 ≥ ε2 1
2 c7 (t − t0)
for all t ≥ t0 such that ¯h(s; t0, ϕ0, ¯h0) s ∈ [t0, t] ⊂ ˇIε,δ.
PROOF: Let B∞ denote the uniform bound of the maps ¯gj
, g3
0,0 given by lemma 2.2.6. Since |ε| ≤
min 1, 1
4 δ ̺ the estimate
ε2
δ2
¯g2
(t, ϕ, ¯h, ε, δ) + ε3
g3
0,0(¯h) + ε3
δ ¯g3
(t, ϕ, ¯h, ε, δ) + ε4
¯g4
(t, ϕ, ¯h, ε)
≤ ε2
δ2
B∞ + ε3
B∞ + ε3
δ B∞ + ε4
B∞ ≤ ε2
δ B∞ δ∞ + 1
4 ̺ + 1 + 1
4 ̺
≤ ε2
δ B∞ (δ∞ + 3)
hold. Hence for 0 < δ ≤ min δ∞, c7
2 B∞ (δ∞+3) , ˙¯h is bounded from below :
˙¯h ≥ ε2
g2
0,0(¯h) − ε2
δ ¯g2
(t, ϕ, ¯h, ε, δ) + ε3
g3
0,0(¯h) + ε3
δ ¯g3
(t, ϕ, ¯h, ε, δ) + ε4
¯g4
(t, ϕ, ¯h, ε)
≥ ε2
c7 − ε2
δ B∞ (δ∞ + 3) ≥ 1
2 ε2
c7.
Thus for all t ≥ t0 such that (ϕ, ¯h)(s; t0, ϕ0, ¯h0) exists for all s ∈ [t0, t] we find ˙¯h(t; t0, ϕ0, ¯h0) = 0 and
therefore
¯h(t; t0, ϕ0, ¯h0) − ¯h0 =
t
t0
˙¯h(s; t0, ϕ0, ¯h0) ds =
t
t0
˙¯h(s; t0, ϕ0, ¯h0) ds
≥
t
t0
1
2 ε2
c7 ds = ε2 1
2 c7 (t − t0).](https://image.slidesharecdn.com/134355b9-c3ce-41ca-8cf9-85f751f98ea6-160201091932/85/Invariant-Manifolds-Passage-through-Resonance-Stability-and-a-Computer-Assisted-Application-to-a-Synchronous-Motor-102-320.jpg)





![94 Chapter 2. Averaging and Passage through Resonance in Plane Systems
Lemma 2.3.5 Consider system (2.29) and assume that |a0| < (ac
1)2
+ (as
1)2
. Then there exists ψ∗
∈
[0, 2π), ε1 > 0 and a map Φ ∈ C2
(R×R×(−ε1, ε1), R2
) satisfying Φ(t, ψ, 0) = 0 which is km 2π–periodic
with respect to t and ψ such that the following statement is true:
The equation
ξ = (ξ1, ξ2) = (ψ, ˜h) − Φ(t, ψ, ε) (2.34)
defines a change of coordinates for ψ ∈ R, ˜h < 4 |αm|
δ . It transforms system (2.29) to a system of the
form
˙ξ = ε J∇ ˆH(ξ) + ε2
∆(t, ξ, ε) (2.35)
defined for ξ ∈ R×[−αδ,m, αδ,m] where αδ,m := 3 |αm|
δ and ˆH(ξ) := 1
2 ξ2
2 −(a0 ξ1 +ac
1 sin(ξ1)−as
1 cos(ξ1)).
In particular there exists a set ξj
H j ∈ Z of hyperbolic fixed points ξj
H = (ψ∗
+ j 2π, 0) of (2.35). The
map ∆ is of class BC1
and km 2π–periodic with respect to t and ξ1.
Finally, the transformation defined via (2.34) maps the region ˜h < 2 |αm|
δ into the ”strip” |ξ2| < αδ,m.
PROOF: We content ourselves here with a sketch of the proof.
1. Existence of ψ∗
: It is elementary that by consequence of |a0| < (ac
1)
2
+ (as
1)
2
there exists a zero
of the function ψ → a0 + ac
1 cos(ψ) + as
1 sin(ψ) such that the derivative in ψ∗
is positive, i.e.
−ac
1 sin(ψ∗
) + as
1 cos(ψ∗
) > 0. (2.36)
2. Existence of periodic solutions of (2.29): Fixing any 0 ≤ j ≤ km − 1 we set x = (x1, x2) =
(ψ − ψ∗
− j 2π, ˜h),
f(x) :=
x2
a0 + ac
1 cos(ψ∗
+ x1) + as
1 sin(ψ∗
+ x2)
g(x, t, ε) :=
ε ˜f2
(t, ψ∗
+ x1, x2, ε)
ε ˜g2
(t, ψ∗
+ x1, x2, ε)
.
Then f(0) = 0, det Df(0) = ac
1 sin(ψ∗
) − as
1 cos(ψ∗
) = 0 and (2.29) is equivalent to
˙x = ε (f(x) + g(x, t, ε)) . (2.37)
Together with the properties of ˜f2
, ˜g2
proved in lemma 2.3.3, the assumptions of lemma 1.2.1 may
be verified for (2.37) with p = 1, ˜r = 2 and T = km 2π. Hence it is a consequence of lemma 1.2.1
that for |ε| sufficiently small, there exists a km 2π–periodic solution ˇxj
(t, ε) of system (2.37) of class
C2
, satisfying ˇxj
(t, 0) = 0.
As we chose 0 ≤ j ≤ km − 1 arbitrary and the vector field in (2.29) is km 2π–periodic with respect
to ψ it follows that there exists a family ˇψj
, ˇhj
j ∈ Z of km 2π–periodic solutions of (2.29)
where ˇψj+km
, ˇhj+km
(t, ε) − ˇψj
, ˇhj
(t, ε) = (km 2π, 0) and ˇψj
, ˇhj
(t, 0) = (ψ∗
+ j 2π, 0).](https://image.slidesharecdn.com/134355b9-c3ce-41ca-8cf9-85f751f98ea6-160201091932/85/Invariant-Manifolds-Passage-through-Resonance-Stability-and-a-Computer-Assisted-Application-to-a-Synchronous-Motor-108-320.jpg)
![2.3. The Discussion of the Transformed Systems 95
3. Existence of the transformation Φ: Consider a function χ ∈ BC2
(R, R) with the following properties
• χ(s) = 1 if |s| ≤ 2π/3
• χ(s) = 0 if |s| ≥ 4 π/3
• χ(s) + χ(s − 2π) = 1 for all s ∈ [0, 2π] 2π
3
4π
3
2π
3
4π
3
s
2π0--
and define
Φ(t, ψ, ε) :=
j∈Z
χ(ψ − ψ∗
− j 2π) ˇψj
, ˇhj
(t, ε) − (ψ∗
+ j 2π, 0) .
Note that this definition implies
Φ(t, ˇψj
(t, ε), ε) = ˇψj
, ˇhj
(t, ε) − (ψ∗
+ j 2π, 0) ∀j ∈ Z. (2.38)
It then is straightforward to establish the statement claimed on the existence of the transformation
(2.34) and the form of the transformed vector field, as presented in (2.35).
4. Hyperbolicity of the fixed points: By consequence of (2.38) we find (ψ, ˜h)(t) = ˇψj
, ˇhj
(t, ε) to be
equivalent to
ξ(t) = ˇψj
, ˇhj
(t, ε) − Φ(t, ˇψj
(t, ε), ε) = (ψ∗
+ j 2π, 0) ∀t ∈ R
and thus ξj
H := (ψ∗
+j 2π, 0) to be a fixed points of (2.35). Expanding the characteristic exponents
of the linearization of (2.35) at ξ = ξj
H with respect to ε yields
±ε −ac
1 sin(ψ∗ + j 2π) + as
1 cos(ψ∗ + j 2π) + O(ε2
).
Thus by (2.36) there exists ε1 > 0 such that for 0 = |ε| < ε1 these eigenvalues have non–zero real
values and are of opposite sign.
Recall that by lemma 2.3.3, system (2.29) is defined for ˜h ≤ 4 |αm|
δ . Hence we may choose ε1 sufficiently
small such that the images of the region ˜h < 2 |αm|
δ applying the transformation (2.34) are contained in
the ”strip” |ξ2| < αδ,m = 3 |αm|
δ . Without loss of generality we furthermore may assume that the image
of ˜h ≤ 4 |αm|
δ contains the set 3 |αm|
δ such that the map ∆(t, ξ, ε) is defined for |ξ2| ≤ αδ,m. This proves
the statements given in lemma 2.3.5.
Note that by consequence of lemma 2.3.5 every solution of (2.25) with initial value ¯h − hm < 2 |ε|
δ
corresponds to a unique solution of (2.35) with initial value |ξ2| < αδ,m. This makes it possible to obtain
qualitative results on (2.25) by discussing system (2.35).
Definition 2.3.6 For technical reason we define regions Cj
δ , j ∈ Z together with their upper bound-
aries Aj
δ in the strip |ξ2| ≤ αδ,m using the (un)stable manifolds of the hyperbolic fixed points ξj
H of the
”unperturbed” autonomous Hamiltonian system
˙ξ = ε J∇ ˆH(ξ)
as illustrated in the following figure:](https://image.slidesharecdn.com/134355b9-c3ce-41ca-8cf9-85f751f98ea6-160201091932/85/Invariant-Manifolds-Passage-through-Resonance-Stability-and-a-Computer-Assisted-Application-to-a-Synchronous-Motor-109-320.jpg)

![2.3. The Discussion of the Transformed Systems 97
hence by definition of b3 |∆(t, ξ, ε)| ≤ b4
b3
∇ ˆH(ξ) .
2. On the other hand, if for j ∈ Z fixed, ξ ∈
j∈Z
Cj
δ satisfies ξ − ξj
H ≤ b2, then
b5 := sup
|∂ξ∆(t, ξ, ε)| t ∈ R, ξ ∈
j∈Z
BR2 (ξj
H , b2), |ε| ≤ ε1
< ∞.
Since ∇ ˆH(ξj
H ) = 0, for every ξ ∈
j∈Z
Cj
δ there exists an ˜ξ(ξ, ξj
H ) such that
∇ ˆH(ξ) = D2 ˆH(ξj
H ) ξ − ξj
H + D3 ˆH(˜ξ(ξ, ξj
H)) ξ − ξj
H
[2]
≥ D2 ˆH(ξj
H) ξ − ξj
H − D3 ˆH(˜ξ(ξ, ξj
H)) ξ − ξj
H
[2]
≥ 1/ D2 ˆH(ξj
H)−1
− b1 ξ − ξj
H ξ − ξj
H
≥ 1/ D2 ˆH(ξj
H)−1
− b1 b2 ξ − ξj
H
= ξ − ξj
H / 2 D2 ˆH(ξj
H )−1
.
Using ∆(t, ξj
H, ε) = 0 (lemma 2.3.5) we obtain the inequality
|∆(t, ξ, ε)| ≤ b5 ξ − ξj
H ≤ b5 2 D2 ˆH(ξj
H )−1
∇ ˆH(ξ) .
Setting ¯∆ := max b4
b3
, 2 b5 D2 ˆH(ξj
H )−1
the claim is established.
Lemma 2.3.8 Let ˆH denote the Hamiltonian introduced in lemma 2.3.5 and ¯∆ be the constant given by
lemma 2.3.7. Setting
w(ξ, ε) :=
¯∆
√
1 − ε2 ¯∆2
∇ ˆH(ξ) for 0 < ε < 1/ ¯∆, (2.40)
the following statements hold for all1
t ∈ R, ξ ∈
j∈Z
Cj
δ , 0 < ε ≤ ε2 := min ε1, 1
2 ¯∆
and any fixed Λ > 0
2.41 a. ε J∇ ˆH(ξ) + ε2
∆(t, ξ, ε) ∧ ε J∇ ˆH(ξ) + ε2
(1 + Λ) w(ξ, ε) ≥ ε3 1
2 Λ ¯∆ ∇ ˆH(ξ)
2
2.41 b. ε J∇ ˆH(ξ) + ε2
∆(t, ξ, ε) ∧ ε J∇ ˆH(ξ) − ε2
(1 + Λ) w(ξ, ε) ≤ −ε3 1
2 Λ ¯∆ ∇ ˆH(ξ)
2
.
PROOF: It easily may be found that for any fixed ξ ∈
j∈Z
Cj
δ , the vectors ε J∇ ˆH(ξ)+ε2
w(ξ, ε) correspond
to the tangents as illustrated in the figure 2.6:
1For simplicity we will consider non–negative ε in what follows. The procedure given here may be carried over to the
case of ε < 0 by appropriately adapting the signs during the discussion.](https://image.slidesharecdn.com/134355b9-c3ce-41ca-8cf9-85f751f98ea6-160201091932/85/Invariant-Manifolds-Passage-through-Resonance-Stability-and-a-Computer-Assisted-Application-to-a-Synchronous-Motor-111-320.jpg)

![2.3. The Discussion of the Transformed Systems 99
We continue with our task by considering the autonomous systems
2.43 a. ˙ξ = ε J∇ ˆH(ξ) + ε2
(1 + Λ) w(ξ, ε)
2.43 b. ˙ξ = ε J∇ ˆH(ξ) − ε2
(1 + Λ) w(ξ, ε)
It may easily be checked that ξj
H, j ∈ Z are hyperbolic fixed points of (2.43 a), (2.43 b) respectively. Thus
there exist the stable manifold Uj+1,+
+,ε and the unstable manifold Uj+1,−
+,ε of ξj+1
H for system (2.43 a) as
well as the stable manifold Uj,+
−,ε and the unstable manifold Uj,−
−,ε of ξj
H for system (2.43 b). With the help
of these manifolds we now define the strip of passage Dj
ε,δ, bounded by Uj,±
−,ε and Uj+1,±
+,ε as illustrated in
figure 2.7.
Q ( )
Q ( )
000000000000000000000000000000000000000000000000111111111111111111111111111111111111111111111111
A
P( )1 0
P( )1 ε
H
ε
0
−,ε
δ
ξ00
00
000
000
00
0000
0000
0000
0000
00
11
11
111
111
11
1111
1111
1111
1111
11
1
j
1
j
j,-
H
j+1
000000
0000
111111
1111
U
ξ● ●
j
D
αδ,m
ξ1
ε,δ
U
j,+
−,ε
U
j+1,-
j+1,+
U+,ε
+,ε
●
●
●
●
Figure 2.7: Definition of the set Dj
ε,δ using the invariant manifolds of ξj
H, ξj+1
H with respect to systems
(2.43 a), (2.43 b) respectively (in the case a0 < 0). The curves plotted light grey depict level curves of ˆH.
By consequence of lemma 2.3.8 the vector field ε J∇ ˆH(ξ) + ε2
∆(t, ξ, ε) of system (2.35) evaluated on
the boundaries Uj+1,±
+,ε and Uj,±
−,ε of Dj
ε,δ points strictly into Dj
ε,δ for all t ∈ R. Hence Dj
ε,δ is positively
invariant with respect to (2.35). This is proved via the following general result.
Lemma 2.3.9 Assume that we are given constants δ0, δ1 > 0, maps F ∈ C1
(Q, R2
) and G ∈ C1
(R ×
Q, R2
) (where Q := (−δ1, δ1) × (−δ1, δ1)) as well as s+
0 , s−
0 ∈ C1
((−δ1, δ1), (−δ1, δ1)) together with a
family sα ⊂ C1
((−δ1, δ1), (−δ1, δ1)), α ∈ (0, δ0] satisfying sα(0) = α such that the following statements
are true.](https://image.slidesharecdn.com/134355b9-c3ce-41ca-8cf9-85f751f98ea6-160201091932/85/Invariant-Manifolds-Passage-through-Resonance-Stability-and-a-Computer-Assisted-Application-to-a-Synchronous-Motor-113-320.jpg)
![100 Chapter 2. Averaging and Passage through Resonance in Plane Systems
1. The system
˙ξ = F(ξ), ξ ∈ Q (2.44)
admits a hyperbolic fixed point at ξ = 0. The stable manifold U+
0 and the unstable manifold U−
0 of
ξ = 0 are identical to graph(s+
0 ), graph(s−
0 ), respectively. The graph Uα := graph(sα) is invariant
with respect to (2.44) for every 0 < α ≤ δ0.
2. The system
˙ξ = F(ξ) + G(t, ξ), ξ ∈ Q (2.45)
admits a hyperbolic fixed point at ξ = 0. We denote the corresponding local stable manifold at time
t0
by ˆU+
t0 .
3. Let2
U+
0,r := U+
0 ∩ R+ × R, U−
0,l := U−
0 ∩ R− × R and S := U+
0,r ∪ U−
0,l ∪
α∈(0,δ0]
Uα. For every t ∈ R,
ξ ∈ S {0} the inequality
F(ξ) ∧ G(t, ξ) < 0 (2.46)
applies. Finally the first component of the vector F(ξ) is not positive for all ξ ∈ S.
Then the local stable manifold of the hyperbolic fixed point ξ = 0 of system (2.45) lies outside the set S
for every t0
, i.e.
ˆU+
t0 ∩ S = {0}
for all t0
in R.
1
δ1
U
+
t
δ
δ0
U
0
U
+
^
α
ξ1
ξ2
F( )+G(t, )ξ ξ
ξ
0
U
+
0 U
,r
0
F( )
−
0,l
−
U
α
Q
S
Figure 2.8: Illustration of the situation considered in lemma 2.3.9.
2where R− := {t ∈ R | t ≤ 0}](https://image.slidesharecdn.com/134355b9-c3ce-41ca-8cf9-85f751f98ea6-160201091932/85/Invariant-Manifolds-Passage-through-Resonance-Stability-and-a-Computer-Assisted-Application-to-a-Synchronous-Motor-114-320.jpg)
![2.3. The Discussion of the Transformed Systems 101
PROOF: The proof of this lemma is carried out in two steps. We first establish that for every 0 < α ≤ δ0
the set
Mα := {(t, ξ1, ξ2) ∈ R × Q | ξ2 ≥ sα(ξ1)}
is positive invariant with respect to the system (2.45) (written in autonomous form). This is shown by
applying theorem (16.9) in [1]. In a first step we fix any 0 < α ≤ δ0 and define the set X := R × Q as
well as the map
Φ(t, ξ) := sα(ξ1) − ξ2
for (t, ξ) ∈ X. It then is evident that Mα = Φ−1
((−∞, 0]) and Φ ∈ C1
(X, R). As the gradient of Φ is
given by
∇Φ(t, ξ) =
0
∂ξ1 sα(ξ1)
−1
it does not vanish on X. Since Φ−1
({0}) = R×Uα and the vector F(ξ1, sα(ξ1)) is tangent to Uα for every
|ξ1| < δ1 we have
∇Φ(t, ξ)
0
F(ξ)
= 0 ∀(t, ξ) ∈ R × Uα.
Taking into account that the first component of F(ξ) is not positive on Uα we conclude
|F(ξ)| ∇Φ(t, ξ) = |∇Φ(t, ξ)|
0
−JF(ξ)
∀(t, ξ) ∈ R × Uα.
Hence we find by (2.46)
|F(ξ)| ∇Φ(t, ξ)
1
F(ξ) + G(t, ξ)
= |∇Φ(t, ξ)|
0
−JF(ξ)
1
F(ξ) + G(t, ξ)
= |∇Φ(t, ξ)| F(ξ) ∧ G(t, ξ) < 0
for all (t, ξ) ∈ R × Uα = ∂Mα. Hence theorem (16.9) in [1] may be applied here and implies the positive
invariance of Mα with respect to the autonomous system
d
dt
(t, ξ) = f(t, ξ) = (1, F(ξ) + G(t, ξ)) (2.47)
defined on X. Since α ∈ (0, δ0] was chosen arbitrary this is true for all α ∈ (0, δ0].
In a second step we prove the claim made in lemma 2.3.9 by contradiction. Assume that there exists
t0
∈ R and ξ0
∈ ˆU+
t0 ∩ S with ξ0
= 0. If on one hand ξ0
∈ U+
0,r ∪ U−
0,l then
F(ξ0
) ∧ F(ξ0
) + G(t0, ξ0
) = F(ξ0
) ∧ G(t0, ξ0
) < 0
i.e. the tangent vector at (t0
, ξ0
) on the orbit of the solution ξ(t; t0
, ξ0
) with initial value (t0
, ξ0
) of (2.47)
points strictly into the set
M0 := (t, ξ1, ξ2) ∈ X ξ2 ≥ max s+
0 (ξ1), s−
0 (ξ1) .](https://image.slidesharecdn.com/134355b9-c3ce-41ca-8cf9-85f751f98ea6-160201091932/85/Invariant-Manifolds-Passage-through-Resonance-Stability-and-a-Computer-Assisted-Application-to-a-Synchronous-Motor-115-320.jpg)
![102 Chapter 2. Averaging and Passage through Resonance in Plane Systems
Hence there exist t1
> t0
, α ∈ (0, δ0] such that ξ1
:= ξ(t1
; t0
, ξ0
) ∈ Mα. However, as ξ0
∈ ˆU+
t0 we find
ξ1
∈ ˆU+
t1 ∩ Mα. If on the other hand ξ0
∈ U+
0,r ∪ U−
0,l then ξ0
∈
α∈(0,δ0]
Uα. Hence there exists α ∈ (0, δ0]
such that ξ1
:= ξ0
is an element of ˆU+
t1 ∩ Mα at time t1
:= t0
.
For every point ξ1
∈ ˆU+
t1 ∩ Mα the limit of ξ(t; t1
, ξ1
) for t → ∞ exists and corresponds to the origin. As
α = 0 and sα is continuous the set Mα is bounded away from the origin and thus the solution ξ(t; t1
, ξ1
)
leaves Mα. This contradicts to the positive invariance of Mα proved in the first step.
We apply this result in order to prove that Dj
ε,δ is positively invariant with respect to (2.35).
Lemma 2.3.10 The set Dj
ε,δ is positively invariant with respect to system (2.35). Moreover there exists
ε3 > 0 such that if 0 < ε < ε3, all solutions ξ(t) of (2.35) starting in Aj
δ ∩ Dj
ε,δ eventually cross the set
ξ2 = −αδ,m i.e. pass the resonance region.
PROOF: Let us first introduce the abbreviations
F(ξ, ε) := ε J∇ ˆH(ξ) + ε2
(1 + Λ) w(ξ, ε) and G(t, ξ, ε) := ε2
∆(t, ξ, ε) − ε2
(1 + Λ) w(ξ, ε).
Calculating
ε J∇ ˆH(ξ) + ε2
∆(t, ξ, ε) ∧ ε J∇ ˆH(ξ) + ε2
(1 + Λ) w(ξ, ε)
= − − ε J∇ ˆH(ξ) ∧ ε2
(1 + Λ) w(ξ, ε) + ε J∇ ˆH(ξ) ∧ ε2
∆(t, ξ, ε) + ε2
(1 + Λ) w(ξ, ε) ∧ ε2
∆(t, ξ, ε)
= − ε J∇ ˆH(ξ) + ε2
(1 + Λ) w(ξ, ε) ∧ ε2
∆(t, ξ, ε) − ε2
(1 + Λ) w(ξ, ε)
= −F(ξ, ε) ∧ G(t, ξ, ε)
it follows from lemma 2.3.8 that
F(ξ, ε) ∧ G(t, ξ, ε)
< 0 ξ ∈ Cj
δ {ξj
H, ξj+1
H }
= 0 ξ ∈ {ξj
H, ξj+1
H }.
(2.48)
Using the abbreviations F, G we rewrite system (2.35) in autonomous form:
˙t = 1, ˙ξ = F(ξ, ε) + G(t, ξ, ε). (2.49)
An outer orthogonal vector to the manifold R × Uj+1,+
+,ε in (t, ξ) is given by
0
−JF(ξ, ε)
whereas the
vector
1
F(ξ, ε) + G(t, ξ, ε)
is tangent to the trajectory of (2.49) through (t, ξ) ∈ R × Uj+1,+
+,ε . Since
0
−JF(ξ, ε)
1
F(ξ, ε) + G(t, ξ, ε)
= F(ξ, ε) ∧ G(t, ξ, ε) ≤ 0 ∀ ξ ∈ Uj+1,+
+,ε
this implies that the vector field of (2.49) does not point outside R× Uj+1,+
+,ε . Using analogous arguments
on Uj+1,−
+,ε , Uj,+
−,ε and Uj,−
−,ε it follows that Dj
ε,δ is positively invariant with respect to system (2.49), (2.35)
respectively.](https://image.slidesharecdn.com/134355b9-c3ce-41ca-8cf9-85f751f98ea6-160201091932/85/Invariant-Manifolds-Passage-through-Resonance-Stability-and-a-Computer-Assisted-Application-to-a-Synchronous-Motor-116-320.jpg)
![2.3. The Discussion of the Transformed Systems 103
Q ( )
Q ( )
00000000000000000000000000000000000000000000000001111111111111111111111111111111111111111111111111
m
ε1
−,ε
j,-
U
000
00000
00000
00000
00000
000
0000
111
11111
11111
11111
11111
111
1111
α
α
m
ξ
δ,
j
U
P( )
000
00000
000000
00000
000
00000
000
111
11111
111111
11111
111
11111
111
j
T
δ,
0
ξH
1
H
0
^ j,+
Uε,
t
j+1,-
^ j+1,+
U
1
j
+,ε
ε,3
ε,2
Tε,4
j
Tε,5
j+1
C
P( )
j
j
Tε,1
0
ε1
t
0
000000
000000
111111
111111
A
j
δ
ε,
T
j
δ
● ● ξ1
U
j,+
−,ε
j+1,+
U+,ε
●
●
●
●
β
β
α
Figure 2.9: Illustration of the sets T j
ε,k ⊂ Dj
ε,δ considered in the proof of lemma 2.3.10.
The hyperbolic fixed point solution ξ = ξj+1
H of (2.35) admits a time–dependent local stable manifold
(provided that 0 < ε < ε3 and ε3 is chosen sufficiently small). We denote its intersection with t = t0
by ˆUj+1,+
ε,t0
. In a similar way there exists the intersection ˆUj,+
ε,t0
of the stable manifold of ξj
H with t = t0.
In view of (2.48) it is possible to transform system (2.35) in a neighbourhood of ξj+1
H such that all
assumptions of lemma 2.3.9 are fulfilled. As a very similar transformation will be carried out explicitely
below we refer the reader to the proof of proposition 2.3.11. By consequence of lemma 2.3.9 the sets
Uj+1,+
+,ε and ˆUj+1,+
ε,t0
at any time t0 are locally situated as depicted in figure 2.9. Using the same arguments
it is possible to establish the arrangement of the curve ˆUj,+
ε,t0
of ξj
H as depicted in figure 2.9. In particular
we find the curves ˆUj,+
ε,t0
and ˆUj+1,+
ε,t0
to intersect the positively invariant set Dj
ε,δ in {ξj
H, ξj+1
H } solely.
Let α ∈ (ξj
H,1, ξj+1
H,1 ) be the unique number such that ∇ ˆH(α, 0) = 0 (i.e. (α, 0) corresponds to the elliptic
fixed point of ˙ξ = ε J∇ ˆH(ξ) situated between ξj
H and ξj+1
H ). In addition there exists a constant β > 0
such that the regions
T j
ε,1 := Dj
ε,δ ∩ [ξj+1
H,1 − β, ξj+1
H,1 ) × R and T j
ε,2 := Dj
ε,δ ∩ (−∞, α) × [−β, 0)
are contained in the neighbourhoods where lemma 2.3.9 is applied and that the qualitative behaviour
inside T j
ε,1, T j
ε,2 is determined by the linearization of (2.35) in ξj
H , ξj+1
H respectively. It then may be seen
that due to the position of the curves ˆUj,+
ε,t0
, ˆUj+1,+
ε,t0
every solution of (2.35) with initial value ξ0
∈ T j
ε,1
(ξ0
∈ T j
ε,2 respectively) leaves T j
ε,1 (T j
ε,2) within finite time.
We show that the same statement is true for the sets
T j
ε,3 := Dj
ε,δ ∩ (−∞, α] × R+ T j
ε,4 := Dj
ε,δ ∩ [α, ξj+1
H,1 − β] × R T j
ε,5 := Dj
ε,δ ∩ (−∞, α] × (−∞, −β].](https://image.slidesharecdn.com/134355b9-c3ce-41ca-8cf9-85f751f98ea6-160201091932/85/Invariant-Manifolds-Passage-through-Resonance-Stability-and-a-Computer-Assisted-Application-to-a-Synchronous-Motor-117-320.jpg)
![104 Chapter 2. Averaging and Passage through Resonance in Plane Systems
We start with T j
ε,3. It is easy to see that there exists a constant 0 < b0 < ∞ such that for every
ξ ∈ Cj
δ,3 := Cj
δ ∩ (−∞, α] × R+ the estimate ξ − ξj
H ≤ b0 ξ2 holds. Hence from lemma 2.3.7
|∆(t, ξ, ε)| ≤ ¯∆ ∇ ˆH(ξ) ≤ ¯∆ sup
ξ0∈Cj
δ,3
D2 ˆH(ξ0
) b0 ξ2 =: b1 ξ2
such that when plugging in the definition of ˆH (cf. lemma 2.3.5) the first component of (2.35) is bounded
from below, i.e.
(F(ξ, ε) + G(t, ξ, ε))1 = ε ξ2 + ε2
∆2(t, ξ, ε) ≥ ε ξ2 (1 − ε b1) ≥ ε 1
2 ξ2
provided that ε is sufficiently small and 0 < ε < ε3. Hence for ξ ∈ T j
ε,3 ⊂ Cj
δ,3 we have
(F(ξ, ε) + G(t, ξ, ε))1 ≥ ε 1
2 dist Uj,+
−,ε, ξj
H > 0.
By consequence every solution of (2.35) starting in T j
ε,3 reaches the border T j
ε,3 ∩ {α} × R within finite
time. A very similar argument leads to
(F(ξ, ε) + G(t, ξ, ε))1 < −ε 1
2 β
in T j
ε,5 such that solutions starting in T j
ε,5 leave this set at ξ2 = −αδ,m within finite time (after possibly
having passed the region T j
ε,2). As
sup (F(ξ, ε) + G(t, ξ, ε))2 ξ ∈ T j
ε,4 < 0
we conclude that every solution in T j
ε,4 reaches T j
ε,5 within finite time (after possibly having passed through
T j
ε,1).
Summarizing these results on T j
ε,k, k = 1, . . . , 5 we conclude that every solution ξ(t) of (2.35) starting in
Aj
δ ∩ Dj
ε,δ eventually crosses the set ξ2 = −αδ,m indeed.
As mentioned before, the aim of this section is to show that in the case where |a0| < (ac
1)2
+ (as
1)2
the set of solutions of (2.25) not passing the inner region is at most of size O(ε). Using the notation
introduced before we now are in the position to formulate this statement in a precise way. This is the
subject of the following main result.](https://image.slidesharecdn.com/134355b9-c3ce-41ca-8cf9-85f751f98ea6-160201091932/85/Invariant-Manifolds-Passage-through-Resonance-Stability-and-a-Computer-Assisted-Application-to-a-Synchronous-Motor-118-320.jpg)
![2.3. The Discussion of the Transformed Systems 105
Proposition 2.3.11 There exists ε4 > 0 such that for every 0 < ε < ε4 the following statement holds:
The (Lebesgue) measure of the set Aj
δ Aj
δ ∩ Dj
ε,δ is of size O(ε). Thus the set of initial values for
which the corresponding solutions of (2.35) are possibly captured in the inner region |ξ2| ≤ αδ,m (and
therefore near the resonance ¯h = hm of (2.25)) tends towards zero as ε → 0.
PROOF: In order to prove the statement given, one shows that the point P1(ε) of intersection of Uj,+
−,ε
with Aj
δ and Q1(ε) of Uj+1,+
+,ε with Aj
δ are O(ε)–close to the points P1(0), Q1(0) i.e. the border of Aj
δ
(cf. figure 2.7). By definition of the sets Aj
δ, Dj
ε,δ this establishes the claim made in proposition 2.3.11.
We will give the proof for the more delicate situation of P1(ε). The analogous result on Q1(ε) then may
be proved using the same arguments.
Let us begin by recalling definition 2.40 of the vector field w. Plugging this into (2.43 b) yields
˙ξ = ε J∇ ˆH(ξ) − ε2
(1 + Λ)
¯∆
√
1 − ε2 ¯∆2
∇ ˆH(ξ).
Since (2.43 b) is autonomous, we may rescale the time variable t without any consequences on the stable
manifold Uj,+
−,ε of ξj
H. Thus let us consider the system
d
dτ
ξ = J∇ ˆH(ξ) − α(ε) ∇ ˆH(ξ) (2.50)
where α(ε) := ε (1 + Λ)
¯∆√
1−ε2 ¯∆2
and τ = ε t.
Let T ∈ R2×2
denote the matrix such that T −1
JD2 ˆH(ξj
H ) T is diagonal and set ξ − ξj
H = T ˜x. Then
(2.50) is transformed into
d
dτ
˜x = T −1
J∇ ˆH(ξj
H + T ˜x) − α(ε) ∇ ˆH(ξj
H + T ˜x) . (2.51)
We proceed in several steps :
1. For ε sufficiently small, system (2.51) admits (un)stable manifolds ˜U+
ε , ˜U−
ε of the hyperbolic fixed
point ˜x = 0. It is evident that the stable manifold ˜U+
ε of ˜x = 0 with respect to (2.51) corresponds
to the stable manifold Uj,+
−,ε of ξj
H with respect to (2.43 b).
2. Following the general results on the existence of invariant manifolds of hyperbolic fixed points it is
possible to locally represent the (un)stable manifolds ˜U±
ε as graphs over a subset of the ˜x1, ˜x2–axis
respectively. More precisely there exist δ1 > 0, ε4 and functions s+
, s−
in C1
([−δ1, δ1] × [0, ε4], R)
such that for any 0 ≤ ε ≤ ε4 the following holds:
(˜x1, ˜x2) | ˜x2 = s+
(˜x1, ε), |˜x1| ≤ δ1 ⊂ ˜U+
ε
(˜x1, ˜x2) | ˜x1 = s−
(˜x2, ε), |˜x2| ≤ δ1 ⊂ ˜U−
ε .
3. Given a number 0 < δ2 ≤ 1
2 δ1 which will be fixed in step 5 we consider the intersection
Qδ2,ε := (˜x1, ˜x2) ˜x1 − s−
(˜x2, ε) ≤ δ2, ˜x2 − s+
(˜x1, ε) ≤ δ2
of the δ2–neighbourhoods of the graphs of s+
and s−
. As depicted in figure 2.10 we then define
the points ˜P2(ε), ˜P3(ε) of intersection of ∂Qδ2,ε with ˜U+
ε as well as the (upper) point ˜P4(ε) of
intersection of ˜U−
ε with ∂Qδ2,ε.](https://image.slidesharecdn.com/134355b9-c3ce-41ca-8cf9-85f751f98ea6-160201091932/85/Invariant-Manifolds-Passage-through-Resonance-Stability-and-a-Computer-Assisted-Application-to-a-Synchronous-Motor-119-320.jpg)
![106 Chapter 2. Averaging and Passage through Resonance in Plane Systems
4. For ε = 0 there exists a homoclinic orbit which we will denote by ˜xh
. Let τ0 denote the real number
such that the second coordinate ˜xh
(τ0)2 of ˜xh
(τ0) is equal to δ2. Then the distance of the manifolds
˜U+
ε and ˜U−
ε near ˜xh
(τ0) is given by the expression
− (1 + Λ) ε ¯∆
int ˜xh
trace T −1
D2 ˆH(ξj
H + T ˜x) T
T −1 J∇ ˆH(ξj
H + T ˜xh(τ0))
d˜x + O(ε2
)
(cf. formulae (4.5.6), (4.5.11) and (4.5.15) in [5]). We therefore conclude ˜P3(ε) − ˜P4(ε) = O(ε).
Figure 2.10: The situation considered in the proof of proposition 2.3.11 (˜x–coordinates)](https://image.slidesharecdn.com/134355b9-c3ce-41ca-8cf9-85f751f98ea6-160201091932/85/Invariant-Manifolds-Passage-through-Resonance-Stability-and-a-Computer-Assisted-Application-to-a-Synchronous-Motor-120-320.jpg)


![2.3. The Discussion of the Transformed Systems 109
2.3.5 On the Proof of Existence of Capture in Resonance
In contrast to the preceeding subsections we now aim on the existence of solutions which do not pass the
resonance zones. We will see that the criteria necessary to decide whether such solutions exist or not are
based on the discussion of the O(ε3
)–terms in (2.1). The explicit determination of these terms for the
application considered in chapter 4 requires an extensive amount of preparations and evaluations beyond
the scope of this work, however. Hence we content ourselves with a short sketch of the process necessary
to obtain these terms.
1. Consider the representation (2.29) of system (2.25) in the inner variables. We then are in the
situation dealt with in [14]. In this paper the author shows that the leading term of the Melnikov
function is given by
d1
:=
R
˜hs(s)
a0 +
l∈N∗
ac
l cos(lψs(s)) + as
l sin(lψs(s)) ∧
˜f2
,0(ψs(s), ˜hs(s))
˜g2
,0(ψs(s), ˜hs(s))
ds
where ˜f2
,0(ψ, ˜h), ˜g2
,0(ψ, ˜h) denote the O(1)–terms of the mean values of ˜f2
(t, ψ, ˜h, ε), ˜g2
(t, ψ, ˜h, ε)
with respect to t and (ψs, ˜hs) is the homoclinic solution of the ”unperturbed system”3
. (If system
(2.29) is averaged up to O(ε3
)–terms by using a near–identity transformation of the form ( ¯ψ, ¯h) =
(ψ, ˜h) + ε2
w(t, ψ, ˜h) first, this result may be understood as the well known Melnikov formula of the
resulting system in ( ¯ψ, ¯h)–coordinates.)
2. From the results given in [14] it may be seen at once that if d1
= 0, the sign of d1
determines
the orientation of the (time–dependant) stable and unstable invariant manifolds of the hyperbolic,
km 2π–periodic solutions of (2.29).
3. d1
> 0: ●
If d1
is positive then the every section of the unsta-
ble manifold with t = const lies ”outside” the stable
manifold and no capture into resonance is possible.
4. d1
< 0: ●
If d1
is negative, solutions may be caught in the area
between the (time–dependant) stable and unstable
manifolds, ending inside the ”eye–shaped” region.
Hence a capture into resonance is possible.
5. From definition 2.3.2 and lemma 2.3.3 we see that in order to find explicit formulae for the quantities
˜f2
,0(ψ, ˜h) and ˜g2
,0(ψ, ˜h), a sufficiently explicit representation of the transformation vI
(t, ϕ, ¯h, ε) and
the coefficient maps f2
k,n g3
k,n is needed. From the representation (1.156) of the reduced system
it follows that the deduction of the quantities ˜f2
,0(ψ, ˜h) and ˜g2
,0(ψ, ˜h) requires in particular F2,1
k,n,3,
F3,0
k,n,3 and S2
k,n(h). From definition 1.6.5, proposition 1.6.7 and (1.143), (1.138) we thus see that
the explicit formulae (1.20), (1.21), (1.91), (1.92) must be evaluated when applying the theory to
the example of a miniature synchronous motor in chapter 4.
For the application considered in chapter 4 the procedure corresponding to this last step 5 requires a
significantly more extensive amount of preparations than in section 4.3. Although the questions in relation
to the capture into resonance are of interest, we will omit this discussion in our application.
3i.e. system (2.29) omitting O(ε2)–terms.](https://image.slidesharecdn.com/134355b9-c3ce-41ca-8cf9-85f751f98ea6-160201091932/85/Invariant-Manifolds-Passage-through-Resonance-Stability-and-a-Computer-Assisted-Application-to-a-Synchronous-Motor-123-320.jpg)




![114 Chapter 3. The Stability of the Set {h = 0} in Action Angle Coordinates
(provided that |ε| < ε2, ε2 > 0 sufficiently small) where λ, ˜Ω depend continuously on ε and λ(0) = 1,
˜Ω(0) = Ω0.
Hence we are in the position to apply standard results of Floquet theory, as for instance given in
the proof of Lemma 4, p. 270 in [11]. By consequence of this theory there exists a 2π–periodic
transformation T : R × (−ε2, ε2) → R2×2
of class BCr
with T (t, 0) =
1
Ω0
0
0 1
such that setting
x = T (t, ε) y (3.10)
the equation (3.9) is transformed to
˙y = B(ε) y (3.11)
where B(ε) :=
1
2π ln(λ(ε)) ˜Ω(ε)
−˜Ω(ε) 1
2π ln(λ(ε))
.
3. The next step consist in transforming (3.11) back into action angle coordinates: define the coordi-
nates (ψ, r) via y = r
sin(ψ)
cos(ψ)
and calculate
˙ψ
˙r
=
r cos(ψ) sin(ψ)
−r sin(ψ) cos(ψ)
−1
×
1
2π ln(λ(ε)) ˜Ω(ε)
−˜Ω(ε) 1
2π ln(λ(ε))
r sin(ψ)
r cos(ψ)
=
1
2π
ln(λ(ε))
0
r
+ ˜Ω(ε)
1
0
.
Taking into account that by consequence of Liouville’s theorem (e.g. (11.4) in [1])
λ(ε)2
= µ1(ε) µ2(ε) = exp
2π
0
trace (R + M(t, ε)) dt
we find
1
2π
ln(λ(ε)) =
1
2π
2π
0
g,1
0 (t, ε) dt = g,1
0,0(ε) (3.12)
such that
˙ψ = ˜Ω(ε)
˙r = r g,1
0,0(ε)
This corresponds to the representation claimed in (3.5).
4. In order to establish the first statement completely, it remains to show that the change of coordinates
carried out in the first three steps may be expressed as in (3.4).
Summarizing these transformations we have
P(h)
1
Ω0
sin(ϕ)
cos(ϕ)
= r T (t, ε)
sin(ψ)
cos(ψ)
,](https://image.slidesharecdn.com/134355b9-c3ce-41ca-8cf9-85f751f98ea6-160201091932/85/Invariant-Manifolds-Passage-through-Resonance-Stability-and-a-Computer-Assisted-Application-to-a-Synchronous-Motor-128-320.jpg)




![3.2. Averaging the Linear Term 119
and plugging in the explicit form for ˙h as in (3.1) together with (3.8), (3.18) finally implies
˙r = P(h) g,1
0 (t, ε) − g,1
(t, ψ + u(t, ψ, ε), ε)
1 + ∂ψu(t, ψ, ε)
v(t, ε)
− P(h)
d
dt v(t, ε)
v(t, ε)
1 + ∂ψu(t, ψ, ε)
v(t, ε)
+P(h)
∂2
ψu(t, ψ, ε) r ˆf,1
(t, ψ, ε) + r2 ˆf,2
(t, ψ, r, ε)
2 1 + ∂ψu(t, ψ, ε) v(t, ε)
+P(h)
1 + ∂ψu(t, ψ, ε)
v(t, ε)
g,1
(t, ψ + u(t, ψ, ε), ε)
+
1 + ∂ψu(t, ψ, ε)
v(t, ε)
P(h)
2
g,2
(t, ψ + u(t, ψ, ε), ε) + P(h)
3
g,3
(t, ψ + u(t, ψ, ε), P(h), ε)
= r g,1
0 (t, ε) −
d
dt v(t, ε)
v(t, ε)
+ r2
∂2
ψu(t, ψ, ε) ˆf,1
(t, ψ, ε)
2 (1 + ∂ψu(t, ψ, ε))
+
g,2
(t, ψ + u(t, ψ, ε), ε) v(t, ε)
1 + ∂ψu(t, ψ, ε)
+r3
∂2
ψu(t, ψ, ε) ˆf,2
(t, ψ, r, ε)
2 (1 + ∂ψu(t, ψ, ε))
+
g,3
(t, ψ + u(t, ψ, ε), r v(t,ε)
√
1+∂ψ u(t,ψ,ε)
, ε) v(t, ε)2
1 + ∂ψu(t, ψ, ε)
= r g,1
0 (t, ε) − g,1
0 (t, ε) − g,1
0,0(ε) + r2
ˆg,2
(t, ψ, ε) + r3
ˆg,3
(t, ψ, r, ε).
In view of the definition (3.6) we see that this establishes the claim given in corollary 3.2.2.
Note that since u ∈ BCr
the right hand side of (3.4) is of class BCr−1
provided that |ε| is sufficiently
small. Without any loss of generality we may assume that this is the case if |ε| < ε2. Hence it may be
shown that the maps defined in (3.21) are BCr−1
.
The next corollary deals with the case of linear stability of the invariant set {h = 0} of (3.1).
Corollary 3.2.3 The form (3.20) achieved in this section admits the following conclusion :
1. Assume that there exists a positive constant r∞ such that for all 0 ≤ r ≤ r∞ and any |ε| < ε2 the
inequality
g,1
0,0(ε) > r ˆg,2
(t, ψ, ε) + r ˆg,3
(t, ψ, r, ε) ∀ t, ϕ ∈ R (3.22)
is fulfilled. Then if g,1
0,0(ε) < 0 the invariant set {r = 0} of (3.20) and hence the invariant set
{h = 0} of (3.1) is stable and the set (−r∞, r∞) is contained in the domain of attraction of
{r = 0}. If on the other hand g,1
0,0(ε) > 0 is true then {r = 0} is unstable and every non–trivial
solution in [−r∞, r∞] leaves [−r∞, r∞].
2. Consider the situation where f,j
, g,j
are of order O(ε2
). From (3.7) and (3.8) one then may
conclude that u(t, ψ, ε) = O(ε2
), v = 1+O(ε2
). Together with the identities given in (3.21) we then
find ˆg,2
(t, ψ, ε) = O(ε2
), ˆg,3
(t, ψ, r, ε) = O(ε2
). Hence if g,1
0,0(ε) = 0 then there exists a constant r∞
such that the estimate (3.22) is satisfied. Note that in order to discuss the stability of {h = 0} it
then suffices to consider the sign of the O(ε2
)–terms g2,1
0,0 of g,1
0,0(ε). In particular the mappings u
and v are not needed explicitely.
This result may be established in a similar way as shown in the proof of proposition 2.3.1.](https://image.slidesharecdn.com/134355b9-c3ce-41ca-8cf9-85f751f98ea6-160201091932/85/Invariant-Manifolds-Passage-through-Resonance-Stability-and-a-Computer-Assisted-Application-to-a-Synchronous-Motor-133-320.jpg)





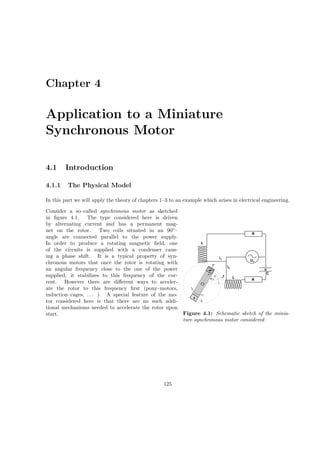
![126 Chapter 4. Application to a Miniature Synchronous Motor
The simplified physical model of this motor is described
via the following system of ordinary differential equations:
d2
dτ2
ϑ = −
λ
J
i2
1 + i2
2 sin(ϕ) − ˜̺
d
dτ
ϑ − ˜m
U0 sin(ωτ) = R i1 + L
d
dτ
i1 + λ
d
dτ
sin(ϑ)
U0 sin(ωτ) = R i2 + L
d
dτ
i2 + λ
d
dτ
cos(ϑ) + u
d
dτ
u = i2/C
(4.1)
where ϕ = ϑ − arg(i2 + i i1). The physical parameters satisfy
U0 ∈ [5, 50] V
L ∈ [0.25, 0.5] V s/A
C ∈ [5 · 10−6
, 25 · 10−6
] A s/V
λ ∈ [0.01, 1.45] V s
R = 100 V/A
ω = 50 · 2π 1/s
J = 5 · 10−8
kg m2
.
(4.2)
The term ˜̺ d
dτ ϑ corresponds to a linear damping, the parameter ˜m to an external torque as for instance,
caused by a constant load.
4.1.2 Simplifying Transformations and Assumptions on the Parameters
Using the definition of ϕ we calculate
i2
1 + i2
2 sin(ϕ) = |i2 + i i1| sin(ϑ − arg(i2 + i i1))
= |i2 + i i1| cos(arg(i2 + i i1)) sin(ϑ)
− |i2 + i i1| sin(arg(i2 + i i1)) cos(ϑ)
= i2 sin(ϑ) − i1 cos(ϑ)
such that system (4.1) reads
d2
dτ2
ϑ = −
λ
J
(i2 sin(ϑ) − i1 cos(ϑ)) − ˜̺
d
dτ
ϑ − ˜m
U0 sin(ωτ) = R i1 + L
d
dτ
i1 + λ
d
dτ
sin(ϑ)
U0 sin(ωτ) = R i2 + L
d
dτ
i2 + λ
d
dτ
cos(ϑ) + u
d
dτ
u = i2/C.
(4.3)
If the parameter λ equals zero, system (4.3) decouples and the subsystem of the electrical variables i1,](https://image.slidesharecdn.com/134355b9-c3ce-41ca-8cf9-85f751f98ea6-160201091932/85/Invariant-Manifolds-Passage-through-Resonance-Stability-and-a-Computer-Assisted-Application-to-a-Synchronous-Motor-140-320.jpg)


![4.1. Introduction 129
4.1.3 Transformation into the Form as Discussed in Chapter 1
For a fixed magnetic dipol of the rotor one expects, that if the mass and therefore the inertia of rotation
J of the rotor is increased, in order to regain a stable behaviour, the voltage U0 has to be increased as
well. We simulate this fact by a first, linear approximation of the form
U0 = ˜a J
for a suitable constant ˜a > 0. In order to simplify the notation in what follows, we introduce some
abbreviations, fix the parameter α and perform a time–dependent shift of the ϑ–coordinate :
a
2
2
:=
λ U0
√
2 J R ω2
=
λ ˜a
√
2 R ω2
ε :=
λ
√
J R ω
=
λ
√
˜a
√
U0 R ω
α :=
U0
√
J R ω3
= ε−1
√
2
a
2
2
̺ :=
˜̺
ε2 ω
m :=
˜m
ε2 ω2
q := ϑ − t p :=
d
dt
ϑ − 1 (4.13)
Remark 4.1.1 Choosing ε as a perturbation parameter may be understood as follows :
If we increase the voltage U0 of the circuit, the magnetic field B will grow as well. Thus the forces acting
on the magnetic dipol of the rotor will be large. In order to prevent the rotor from overreaction, we have
assumed that the inertia of rotation increases together with the voltage U0. The accelerations of the rotor,
caused by the magnetic field, are then expected to be qualitatively invariant.
However, as the moment of magnetic dipol λ is fixed the influence of the rotating magnet on the coils
remains constant as U0 increases. Hence the voltage of induction from the coils back to the circuit remains
small while U0 increases.
Therefore the limit ε → 0 may be interpreted as taking away the effect of the rotating permanent magnet
on the circuit and considering the influence of the magnetic field (caused by the current in the circuit) on
the rotor solely.
Applying (4.1.3) on (4.12) yields a system of the form (1.1) considered in chapter 1, namely
˙q = p
˙p = −
a
2
2
sin(q) + ε (η1 cos(q + t) − η2 sin(q + t)) − ε2
̺ p − ε2
(m + ̺)
˙η1 = −η1 + ε sin(q + t)
˙η2 = −η2 − 2 η3 + ε cos(q + t)
˙η3 = η2 − ε cos(q + t).
(4.14)
Hence we are in the position to discuss the model under consideration using the theory derived in the
previous chapters.
Note that the ranges of the various parameters as listed in (4.2) imply a = 2 λ U0√
2 J R ω3
∈ [0.54, 20.38].](https://image.slidesharecdn.com/134355b9-c3ce-41ca-8cf9-85f751f98ea6-160201091932/85/Invariant-Manifolds-Passage-through-Resonance-Stability-and-a-Computer-Assisted-Application-to-a-Synchronous-Motor-143-320.jpg)

![4.1. Introduction 131
By (4.11) we see that τ = π
4 ω ⇔ t = 0, such that by (4.1.3)
ϑ(
π
4 ω
) = ϑ0,
d
dτ
ϑ(
π
4 ω
) = 0 ⇐⇒ q(0) = ϑ0, p(0) = −1.
Moreover we see that α
U0
λ ω = λ ω√
J R ω3
= ε which implies
i1(
π
4 ω
) = 0 ⇔ η1(0) =
α
U0
λ ω sin(ϑ0) = ε sin(ϑ0)
i2(
π
4 ω
) = 0 ⇔ η2(0) =
α
U0
λ ω cos(ϑ0) −
U0
√
2
= ε cos(ϑ0) − ε−1 a
2
2
u(
π
4 ω
) = 0 ⇔ η3(0) = 0,
which proves a). The statement given in b) is a simple consequence of (4.11) and (4.1.3), since
|p| =
d
dt
ϑ(τ) − 1 =
d
dτ
ϑ(τ) − ω /ω ≤
p∞
ω
.
The aim of this chapter is to show that for a large set of initial values ϑ0 ∈ [0, 2π] as considered in a), the
asymptotic behaviour of the solutions of the physical system (4.1) corresponds to a uniform movement
of the rotor as described in b). This will be proved by applying the theory derived in the preceeding
chapters.
Recall that sufficient information on the asymptotic behaviour of (4.14) may be found if the coeffi-
cient maps gj
k,n (as considered in chapter 2) and g,1
0,0 (as in chapter 3) are known. We will apply the
transformations (introduced in chapter one) which lead to the formulae for g2
k,n in the case of system
(4.14). However, since these preparations include intensive algebraic manipulations, we will make use of
the Maple [15] software package for symbolic algebraic computations. The same software will be used
eventually to carry out the numerical calculations necessary to approximate the values g2
k,n(h).
Considering (4.14), we see that this system is of the general form (1.1) considered in chapter 1 where
d = 3 and the matrix A, the Hamiltonian H and the maps F and G are as follows:
A =
−1 0 0
0 −1 −2
0 1 0
H(q, p) =
p2
2
+
a
2
2
(1 − cos(q))
F(q, p, η, t, ε) = ε
0
η1 cos(q + t) − η2 sin(q + t)
− ε2 0
̺ p + (m + ̺)
(4.15)
G(q, p, t, ε) = ε
sin(q + t)
cos(q + t)
− cos(q + t)
.](https://image.slidesharecdn.com/134355b9-c3ce-41ca-8cf9-85f751f98ea6-160201091932/85/Invariant-Manifolds-Passage-through-Resonance-Stability-and-a-Computer-Assisted-Application-to-a-Synchronous-Motor-145-320.jpg)
![132 Chapter 4. Application to a Miniature Synchronous Motor
4.1.4 Proof of the General Assumptions GA1
It is evident that the functions F and G are of class Cω
, 2π–periodic and fulfill F(q, p, t, η, 0) = 0,
G(q, p, t, 0) = 0 for all q, p, t, η. As a next step we will establish the properties assumed in the General
Assumption of section 1.1.2.
1. The unperturbed Hamiltonian system d
dt (q, p) = J∇H(q, p) corresponds to the pendulum equation
˙q = p
˙p = −
a
2
2
sin(q).
(4.16)
(a) Using the definition of the Hamiltonian H we calculate ∂2
q H(0, 0) ∂2
pH(0, 0) = a
2 . If we
restrict ourselves to parameters a ∈ R∗
+ 2 Z then all assumptions made on the function H are
satisfied.
(b) For any p0 ∈ (−a, a) the solution (q, p)(t; 0, p0) of (4.16) with initial value (0, p0) at time t = 0
corresponds to an oscillatory (or constant) solution of the pendulum equation and may be
expressed by
sin(1
2 q(t; 0, p0)) =
p0
a
sn
a
2
t;
p0
a
p(t; 0, p0) = p0 cn
a
2
t;
p0
a
.
(4.17)
where sn and cn are the Jacobian Elliptic Functions (cf. formula 6.17 in [7]). The frequency
of these solutions is given by
Ω(p0) =
a
2
2π
4 K p0
a
> 0 (4.18)
where K is the Elliptic Integral of the First Kind.
(c) As K is sufficiently regular, we see that choosing any Jr ∈ (0, a) (and setting Jl := −Jr), the
limit dk
dp0
k Ω(p0) for p0 → Jl, Jr exists for all k ∈ N. We will denote the corresponding central
domain of action angle coordinates by JC. Since K(0) = π
2 we eventually find
Ω(0) := lim
p0→0+
Ω(p0) =
a
2
> 0
and the formulae (710.00), (111.02) in [2] imply
d
dp0
Ω(0) = 0.
2. The eigenvalues of the matrix A defined in (4.1.3) are given by −1
2 + i
√
7
2 ,−1
2 − i
√
7
2 and −1 such
that the real parts of these eigenvalues are bounded by −1
2 and A is diagonalizable. This establishes
the assumption GA 1.2.
3. Set Fj
:= 0 (j = 3, 4) and Gj
:= 0 (j = 2, 3, 4) and let
F1
(q, p, η, t) :=
0
η1 cos(q + t) − η2 sin(q + t)
, F2
(q, p, η, t) :=
0
−̺ p − (m + ̺)
G1
(q, p, t) :=
sin(q + t)
cos(q + t)
− cos(q + t)
.
(4.19)](https://image.slidesharecdn.com/134355b9-c3ce-41ca-8cf9-85f751f98ea6-160201091932/85/Invariant-Manifolds-Passage-through-Resonance-Stability-and-a-Computer-Assisted-Application-to-a-Synchronous-Motor-146-320.jpg)

![4.2. Preliminary Discussion and Numerical Simulations 135
4.2 Preliminary Discussion and Numerical Simulations
In order to gain a first overview on the qualitative behaviour of (4.14) and its dependence on the parame-
ters, we present a list of results found through numerical simulations of system (4.14). These simulations
were carried out using the dstool–software package [3].
4.2.1 The Role of the Coupling and the Parameters ̺, m
Let us rewrite system (4.14) in the slightly more general form
˙q = p
˙p = −
a
2
2
sin(q) + µ ε (η1 cos(q + t) − η2 sin(q + t)) − ε2
̺ (p + 1) − ε2
m
˙η1 = −η1 + µ ε sin(q + t)
˙η2 = −η2 − 2 η3 + µ ε cos(q + t)
˙η3 = η2 − µ ε cos(q + t)
(4.23)
i.e. by introducing an additional parameter µ which enables us to control the amount of coupling be-
tween the two subsytems of the (q, p) and the η–coordinates. Considering the (q, p)–plane of the phase
space solely, system (4.23) then may be studied for special choices of the parameters µ, ̺ and m. The
corresponding phase portraits are depicted in figure 4.3. The parameter a is fixed to a = 2.33.
● ●
●
ρ
m
µ
●
Figure 4.3: Dependence of the phase portrait of (4.23) on the parameters](https://image.slidesharecdn.com/134355b9-c3ce-41ca-8cf9-85f751f98ea6-160201091932/85/Invariant-Manifolds-Passage-through-Resonance-Stability-and-a-Computer-Assisted-Application-to-a-Synchronous-Motor-149-320.jpg)

![4.2. Preliminary Discussion and Numerical Simulations 137
4.2.2 The Role of the Parameter a
In order to obtain a first overwiew on the qualitative behaviour of (4.14), (4.23) respectively and in
particular the effect that the coupling of the two subsystems takes, we set ̺ = 0, m = 0 (and µ = 1).
For the parameter a we consider a = 0.54 and a = 20.38, i.e. the lower and upper bound of the domain
considered in (4.14). Since a = 4.0 corresponds to a resonant case (where GA 1.1a is not satisfied, see
section 4.1.4), we consider the value a = 4.1 in addition.
For each choice of the parameter a we depict the following plots: For the solutions (q, p)(t) of (4.14)
considered, the transformation (1.15) into the periodic solution (ˇq, ˇp, ˇη)(t, ε) and hence into the ( ˇQ, ˇP)–
coordinates is approximated numerically. Then the graph of the function t → H(( ˇQ, ˇP)(t)) is shown in a
first figure. The next figure shows the projections of the phase portrait onto the (q, p)–plane. The orbits
of a few solutions are shown near the eye–shaped region. Then the same trajectories are shown with a
large zoom out on the q–axis. This makes it possible to track solutions more globally and to observe the
long time behaviour.
For a = 0.54 the final figure shows a view on the (p, η2)–plane in order to illustrate the behaviour in the
η–space and to demonstrate how solutions approach η ≈ 0. This figure is very similar for a = 4.1 and
a = 20.38 and therefore omitted for these parameters.
Note that due to extreme zoom out, the trajectories plotted may be too tight to be distinguished and
seemingly fill an entire area.
a = 0.54, ̺ = 0, m = 0, (ε = 0.05)
real–world initial values: We first simulate the behaviour of the synchronous motor when switched on.
The corresponding initial values are refered to as the real–world initial values. For a = 0.54 we choose
eight equidistant values for ϑ(0) ∈ [−π, π], d
dτ ϑ(0) = 0 and transform them in accordance to lemma 4.1.2.
The corresponding trajectories then are plotted in black.
As visible in figure 4.4 they limit towards p = −1 which corresponds to d
dt ϑ = 0. The η–components
of these solutions approach a small neighbourhood of η = 0 after some transient behaviour. The corre-
sponding trajectories are shown in figure 4.5. This plot illustrates the existence of an attractive invariant
manifold close to η = 0, as expected by the results found in chapter 1.
We conclude that the power circuit enters some periodic behaviour (cf. transformations (4.6), (4.10)) but
the rotor does not start rotating when the motor is switched on. In figure 4.6 we see that H( ˇQ, ˇP) is
strictly bounded away from zero. As H = 0 is equivalent to ( ˇQ, ˇP) = 0 (modulo 2π in ˇQ) this shows
again that the solutions with real–world initial values remain O(1) away from the periodic solution of
(4.14), i.e. the synchronous rotary behaviour.
reduced system: Secondly we consider initial values with η = 0, i.e. close to the attractive invariant
manifold. This yields a more extensive view of the reduced system. More precisely we show trajectories
corresponding to q(0) = 0, η(0) = 0 and p(0) ∈ [−2, 2]. These trajectories are plotted in grey. The
following result may be seen in figure 4.7 and figure 4.8 best:
For p(0) −0.54 the orbits limit in p = −1. For −0.54 p(0) 0.54 the orbits are caught by the
periodic solution close to the origin (refer also to figure 4.6 where H(( ˇQ, ˇP)(t)) → 0). For p(0) 0.54
some solutions are caught by this periodic solution as well, other solutions pass the q–axis and limit in
p = −1.](https://image.slidesharecdn.com/134355b9-c3ce-41ca-8cf9-85f751f98ea6-160201091932/85/Invariant-Manifolds-Passage-through-Resonance-Stability-and-a-Computer-Assisted-Application-to-a-Synchronous-Motor-151-320.jpg)
![138 Chapter 4. Application to a Miniature Synchronous Motor
t
p
Figure 4.4: t ∈ [0, 2000], p ∈ [−2, 2]
η
p
2
Figure 4.5: p ∈ [−2, 2], η2 ∈ [−2, 2]](https://image.slidesharecdn.com/134355b9-c3ce-41ca-8cf9-85f751f98ea6-160201091932/85/Invariant-Manifolds-Passage-through-Resonance-Stability-and-a-Computer-Assisted-Application-to-a-Synchronous-Motor-152-320.jpg)
![4.2. Preliminary Discussion and Numerical Simulations 139
H(Q,P)
t
Figure 4.6: t ∈ [0, 2000], H( ˇQ, ˇP) ∈ [0, 1]
q
p
p=-1
Figure 4.7: q ∈ [−4, 4], p ∈ [−2, 2]
q
p
Figure 4.8: q ∈ [−500, 500], p ∈ [−2, 2]](https://image.slidesharecdn.com/134355b9-c3ce-41ca-8cf9-85f751f98ea6-160201091932/85/Invariant-Manifolds-Passage-through-Resonance-Stability-and-a-Computer-Assisted-Application-to-a-Synchronous-Motor-153-320.jpg)
![140 Chapter 4. Application to a Miniature Synchronous Motor
a = 4.1, ̺ = 0, m = 0, (ε = 0.05)
real–world initial values: We consider solutions starting with three different values for ϑ(0). In order
to visualize the long time behaviour we have plotted the corresponding trajectories with time–dependent
colour. For t = 0 the orbits are light grey and become black as t → ∞. Two orbits corresponding
to ϑ(0) = −2 and ϑ(0) = −1.1 tend towards the periodic solution close to the origin within the time
0 ≤ t ≤ 2000 integrated numerically. A third orbit corresponding to ϑ(0) = −1.04 is plotted last and
covers the previous two trajectories. Due to some capture in a resonance it is caught in an attractor inside
the eye–shaped region (cf. section 4.5). This is seen in figure 4.11 as the orbit covers itself increasingly
the darker it becomes and the black part of the trajectory therefore corresponds to the ω–limit set. This
ω–limit set inside the attractor has the shape of a circle and intersects the p–axis at p ≈ 1.2.
reduced system: Trajectories corresponding to initial values with q(0) = 0, η(0) = 0 and p(0) ∈ [−6, 6]
are coloured in grey. All these orbits are attracted by the eye–shaped region eventually (figure 4.12).
This is seen in figure 4.10, too, as the energies H( ˇQ, ˇP) become less than 8 as t → ∞ and the set
ˇQ, ˇP H( ˇQ, ˇP) ≤ 8 lies within the eye–shaped region. The plot of H(( ˇQ, ˇP)(t)) versus t illustrates
the capture in the resonance as well: In figure 4.9 this function is evaluated for 20 solutions with initial
values p(0) ∈ [1, 3]. For three of these solutions the energy approaches the value ≈ 0.72 = H(0, 1.2)
indicating a capture in the resonance. (The same is visible for the solution with the real–world initial
value ϑ(0) = −1.04 in figure 4.10.)
H(Q,P)
t
Figure 4.9: t ∈ [0, 6000], H( ˇQ, ˇP) ∈ [0, 2]](https://image.slidesharecdn.com/134355b9-c3ce-41ca-8cf9-85f751f98ea6-160201091932/85/Invariant-Manifolds-Passage-through-Resonance-Stability-and-a-Computer-Assisted-Application-to-a-Synchronous-Motor-154-320.jpg)
![4.2. Preliminary Discussion and Numerical Simulations 141
H(Q,P)
t
Figure 4.10: t ∈ [0, 3000], H( ˇQ, ˇP) ∈ [0, 10]
q
p
p=-1
Figure 4.11: q ∈ [−4, 4], p ∈ [−6, 6]
q
p
Figure 4.12: q ∈ [−3000, 3000], p ∈ [−6, 6]](https://image.slidesharecdn.com/134355b9-c3ce-41ca-8cf9-85f751f98ea6-160201091932/85/Invariant-Manifolds-Passage-through-Resonance-Stability-and-a-Computer-Assisted-Application-to-a-Synchronous-Motor-155-320.jpg)
![142 Chapter 4. Application to a Miniature Synchronous Motor
In order to illustrate the ε–dependence of the amount of solutions being captured in the resonance
presumed, we plot q(t) over the values
σ = δ t + q(0)
for ten equidistant values q(0) ∈ [−3, −0.5] and three different choices for ε. The result is shown in
figure 4.13 where we have used different shades of grey for colouring and different values for δ according
to the following choices of ε:
black ε = 0.4, δ = 3 · 10−5
⇒ 5 orbits are caught in the resonance
dark grey ε = 0.2, δ = 2 · 10−5
(covers previous plot) ⇒ 3 orbits are caught in the resonance
light grey ε = 0.1, δ = 1 · 10−5
(covers previous plots) ⇒ 2 orbits are caught in the resonance.
σ
q
Figure 4.13: σ ∈ [−3, −0.5], q ∈ [−4, 4]
Hence the number of solutions captured in the resonance decreases as ε → 0. Note that the size of
the attracting periodic solution ˇq(t, ε) decreases as ε → 0 while the maximal q–values of the solutions
captured remains constant in the main as this corresponds to the ε–independent position of the resonance.
a = 20.38, ̺ = 0, m = 0, (ε = 0.1)
The colouring of the plots is processed as for a = 4.1, i.e. time–dependent for the real–world initial values
and grey for trajectories close to the reduced system.
real–world initial values: Since the solutions corresponding to this set of initial values start on the line
p = −1 most trajectories start within the eye–shaped region and are caught by the periodic solution near
the origin. The orbits starting outside the eye–shaped region perform a few shifts in the q–coordinate,
then drift into the eye–shaped region as well (see figure 4.16). No capture into resonance is found. As
the numerical integration is performed over the larger time scale t ∈ [0, 4000] and the orbits are coloured
darker with increasing time again, we see in figure 4.15 that the solutions tend slower towards the periodic
solution at the origin, i.e. the periodic solution is less attractive (compared to the preceeding case a = 4.1).
reduced system: The solutions with initial values corresponding to q(0) = 0, η(0) = 0 and p(0) ∈
[−30, 30] are attracted by the eye–shaped region, too.](https://image.slidesharecdn.com/134355b9-c3ce-41ca-8cf9-85f751f98ea6-160201091932/85/Invariant-Manifolds-Passage-through-Resonance-Stability-and-a-Computer-Assisted-Application-to-a-Synchronous-Motor-156-320.jpg)
![4.2. Preliminary Discussion and Numerical Simulations 143
H(Q,P)
t
Figure 4.14: t ∈ [0, 4000], H( ˇQ, ˇP) ∈ [0, 400]
q
p
p=-1
Figure 4.15: q ∈ [−4, 4], p ∈ [−30, 30]
q
p
Figure 4.16: q ∈ [−400, 400], p ∈ [−30, 30]](https://image.slidesharecdn.com/134355b9-c3ce-41ca-8cf9-85f751f98ea6-160201091932/85/Invariant-Manifolds-Passage-through-Resonance-Stability-and-a-Computer-Assisted-Application-to-a-Synchronous-Motor-157-320.jpg)
![144 Chapter 4. Application to a Miniature Synchronous Motor
4.3 Explicit Formulae for the Reduced System, Following Chap-
ter 1
The purpose of this section is to carry out the programme of chapter 1 in the specific case of (4.14). Based
on the general formulae for the system after each transformation (transformations were performed into
the periodic solution, the strongly stable manifold, into action angle coordinates and on the attractive
invariant manifold) we eventually will obtain explicit representations of the maps gj
k,n as in lemma 1.6.9.
Although the formulae given in chapter 1 enable the computation of gj
k,n for j = 2 and j = 3, we will
deal with the ε2
–terms only. This will be sufficient to discuss the model under investigation.
4.3.1 The Transformation into the Periodic Solution
Recall the results given in proposition 1.2.4 : For the map F as in (4.1.3) it follows from (4.19)–(4.22)
that (1.18) takes the form
ˇF1
( ˇQ, ˇP, H, t) = ei ˇQ
M H eit
+ e−i ˇQ
M H e−it
(4.24)
ˇF2
( ˇQ, ˇP, H, t) = −
0
̺ ˇP + (m + ̺)
+ ∆(0, ˇQ, ˇP)
0
(m + ̺)
+ e−i ˇQ
M − ∆(−2, ˇQ, ˇP) M α1,1
−1,2 e−i2t
+ e−i ˇQ
M − ∆(0, ˇQ, ˇP) M α1,1
1,2
+ ei ˇQ
M − ∆(0, ˇQ, ˇP) M α1,1
−1,2
+ ei ˇQ
M − ∆(2, ˇQ, ˇP) M α1,1
1,2 ei2t
(4.25)
ˇG1
( ˇQ, ˇP, t) = ei ˇQ
− 1 v eit
+ e−i ˇQ
− 1 ¯v e−it
(4.26)
where
α1,1
1,2 = [i IR3 − A]−1
v α1,1
−1,2 = [−i IR3 − A]−1
¯v.
Defining
B0 :=
0 1
0 0
B1 := B−1 :=
0 0
−a2
8 0
. (4.27)
we write JD2
H( ˇQ, ˇP) =
0 1
− a
2
2
cos( ˇQ) 0
in the form
JD2
H( ˇQ, ˇP) = B0 + ei ˇQ
B1 + e−i ˇQ
B−1
which implies
∆(n, ˇQ, ˇP) = i n IC 2 − JD2
H( ˇQ, ˇP) i n IC 2 − JD2
H(0, 0)
−1
= ∆0(n) + ∆1(n) ei ˇQ
+ ∆−1(n) e−i ˇQ
(4.28)](https://image.slidesharecdn.com/134355b9-c3ce-41ca-8cf9-85f751f98ea6-160201091932/85/Invariant-Manifolds-Passage-through-Resonance-Stability-and-a-Computer-Assisted-Application-to-a-Synchronous-Motor-158-320.jpg)
![4.3. Explicit Formulae for the Reduced System, Following Chapter 1 145
where
∆0(n) := i n IC 2 − B0] [i n IC 2 − B0 − B1 − B−1]
−1
∆1(n) := −B1 [i n IC 2 − B0 − B1 − B−1]−1
∆−1(n) := −B−1 [i n IC 2 − B0 − B1 − B−1]−1
.
Using these abbreviations we rewrite (4.25) as
ˇF2
( ˇQ, ˇP, H, t) = −̺
0
ˇP
− (m + ̺) IC 2 − ∆(0, ˇQ, ˇP)
0
1
+ ˜z0
0 + ˜z+
0 ei ˇQ
+ ˜z−
0 e−i ˇQ
+ ˜z0
2 + ˜z+
2 ei ˇQ
+ ˜z−
2 e−i ˇQ
ei2t
+ ˜z0
−2 + ˜z+
−2 ei ˇQ
+ ˜z−
−2 e−i ˇQ
e−i2t
(4.29)
with
˜z0
2 = −∆0(2) M α1,1
1,2, ˜z0
−2 = −∆0(−2) M α1,1
−1,2
˜z+
2 = (IC 2 − ∆1(2)) M α1,1
1,2, ˜z+
−2 = −∆1(−2) M α1,1
−1,2
˜z−
2 = −∆−1(2) M α1,1
1,2, ˜z−
−2 = (IC 2 − ∆−1(−2)) M α1,1
−1,2
˜z0
0 = −∆0(0) M α1,1
1,2 − ∆0(0) M α1,1
−1,2
˜z+
0 = (IC 2 − ∆1(0)) M α1,1
−1,2 − ∆1(0) M α1,1
1,2
˜z−
0 = (IC 2 − ∆−1(0)) M α1,1
1,2 − ∆−1(0) M α1,1
−1,2.
Computations in Maple [15] yield the following results :
α1,1
1,2 := −
1
4
−
1
4
i
3
4
−
1
4
i −
1
4
−
1
4
i
T
α1,1
−1,2 := −
1
4
+
1
4
i
3
4
+
1
4
i −
1
4
+
1
4
i
T
IC 2 − ∆(0, ˇQ, ˇP)
0
1
=
0
1 − cos( ˇQ)
˜z0
2 := 0 4
i
−16 + a2
T
˜z0
−2 := 0 − 4
i
−16 + a2
T
˜z+
2 := 0
1
4
i −
1
8
i a2
−16 + a2
T
˜z−
−2 := 0 −
1
4
i +
1
8
i a2
−16 + a2
T
˜z+
−2 := 0
1
8
i a2
−16 + a2
T
˜z−
2 := 0 −
1
8
i a2
−16 + a2
T](https://image.slidesharecdn.com/134355b9-c3ce-41ca-8cf9-85f751f98ea6-160201091932/85/Invariant-Manifolds-Passage-through-Resonance-Stability-and-a-Computer-Assisted-Application-to-a-Synchronous-Motor-159-320.jpg)
![146 Chapter 4. Application to a Miniature Synchronous Motor
˜z0
0 := [ 0 0 ]T
˜z+
0 := 0
1
2
i
T
˜z−
0 := 0 −
1
2
i
T
4.3.2 The Transformation into the Strongly Stable Manifold
In this section we refer to the statement given in proposition 1.4.9. In accordance with (4.24)–(4.30) we
apply (1.90) (note that ˆF2
is evaluated for H = 0):
ˆF1
(Q, P, H, t) = eiQ
− 1 B1 + e−iQ
− 1 B−1 V1
(t) H
+ eiQ
− 1 M H eit
+ e−iQ
− 1 M H e−it
(4.30)
ˆF2
(Q, P, 0, t) = −̺
0
P
− (m + ̺)
0
1 − cos(Q)
+ ˜z0
0 + ˜z+
0 eiQ
+ ˜z−
0 e−iQ
+ ˜z0
2 + ˜z+
2 eiQ
+ ˜z−
2 e−iQ
ei2t
+ ˜z0
−2 + ˜z+
−2 eiQ
+ ˜z−
−2 e−iQ
e−i2t
− V1
(t) eiQ
− 1 v eit
+ e−iQ
− 1 ¯v e−it
.
(4.31)
From (1.91) together with (4.26) we deduce
ˆG1
(Q, P, H, t) = eiQ
− 1 v eit
+ e−iQ
− 1 ¯v e−it
. (4.32)
It remains to compute the linear map V1
(t). We therefore consider the decomposition
esA
=
3
j=1
esλj
TA,λj e−sB
=
2
k=1
e−sωk
TB,ωk
implied by (1.82), where
λ1 := −1, λ2 := −1
2 + i
√
7
2 , λ3 := −1
2 − i
√
7
2 ω1 := i
a
2
, ω2 := −i
a
2
and
TA,λ1 :=
1 0 0
0 0 0
0 0 0
TA,λ2 :=
0 0 0
0
1
14
i
√
7 +
1
2
2
7
i
√
7
0 −
1
7
i
√
7 −
1
14
i
√
7 +
1
2
TA,λ3 :=
0 0 0
0 −
1
14
i
√
7 +
1
2
−
2
7
i
√
7
0
1
7
i
√
7
1
14
i
√
7 +
1
2
TB,ω1 :=
1
2
−
i
a
1
4
i a
1
2
TB,ω2 :=
1
2
i
a
−
1
4
i a
1
2
](https://image.slidesharecdn.com/134355b9-c3ce-41ca-8cf9-85f751f98ea6-160201091932/85/Invariant-Manifolds-Passage-through-Resonance-Stability-and-a-Computer-Assisted-Application-to-a-Synchronous-Motor-160-320.jpg)
![4.3. Explicit Formulae for the Reduced System, Following Chapter 1 147
Taking into account (4.24) which implies ∂H
ˇF1
(0, 0, 0, t) = M eit
+ M e−it
, hence ∂H
ˇF1
1 (0, 0, 0, t) = M,
∂H
ˇF1
−1(0, 0, 0, t) = M, we determine V1
(t) in agreement with (1.83), (1.84):
V1
(t) = eit
V1
1 + e−it
V1
−1 (4.33)
where
V1
1 =
3
j=1
2
k=1
(i − ωk + λj)−1
TB,ωk
M TA,λj
V1
−1 =
3
j=1
2
k=1
(−i − ωk + λj)−1
TB,ωk
M TA,λj .
Evaluation of these sums using Maple [15] yields
V1
1 :=
2
−8 i + a2
−24 i + 2 i a2
−32 i − 20 a2 − 8 i a2 + a4
−32 − 16 i
−32 i − 20 a2 − 8 i a2 + a4
−2 + 2 i
−8 i + a2
8 i − 2 i a2
− 8 − 2 a2
−32 i − 20 a2 − 8 i a2 + a4
−4 i a2
+ 16 i + 16
−32 i − 20 a2 − 8 i a2 + a4
V1
−1 :=
2
8 i + a2
24 i − 2 i a2
32 i − 20 a2 + 8 i a2 + a4
−32 + 16 i
32 i − 20 a2 + 8 i a2 + a4
−2 − 2 i
8 i + a2
−8 i + 2 i a2
− 8 − 2 a2
32 i − 20 a2 + 8 i a2 + a4
4 i a2
− 16 i + 16
32 i − 20 a2 + 8 i a2 + a4
.
Plugging (4.33) into (4.30), (4.31) we obtain a representation for ˆF1
(Q, P, H, t) and ˆF2
(Q, P, H, t) which
is more convenient for the further process:
ˆF1
(Q, P, H, t) = ζ+
1 eiQ
− 1 + ζ−
1 e−iQ
− 1 H eit
+ ζ+
−1 eiQ
− 1 + ζ−
−1 e−iQ
− 1 H e−it
(4.34)
with
ζ+
1 = B1 V1
1 + M ζ−
−1 = B−1 V1
−1 + M
ζ+
−1 = B1 V1
−1 ζ−
1 = B−1 V1
1
and
ˆF2
(Q, P, 0, t) = −̺
0
P
− (m + ̺)
0
1 − cos(Q)
+ z0
0 + z+
0 eiQ
+ z−
0 e−iQ
+ z0
2 + z+
2 eiQ
+ z−
2 e−iQ
ei2t
+ z0
−2 + z+
−2 eiQ
+ z−
−2 e−iQ
e−i2t
(4.35)
where
z0
0 = ˜z0
0 + V1
1 ¯v + V1
−1 v
z+
0 = ˜z+
0 − V1
−1 v
z−
0 = ˜z−
0 − V1
1 ¯v
z0
2 = ˜z0
2 + V1
1 v z0
−2 = ˜z0
−2 + V1
−1 ¯v
z+
2 = ˜z+
2 − V1
1 v z−
−2 = ˜z−
−2 − V1
−1 ¯v
z−
2 = ˜z−
2 z+
−2 = ˜z+
−2.](https://image.slidesharecdn.com/134355b9-c3ce-41ca-8cf9-85f751f98ea6-160201091932/85/Invariant-Manifolds-Passage-through-Resonance-Stability-and-a-Computer-Assisted-Application-to-a-Synchronous-Motor-161-320.jpg)




![152 Chapter 4. Application to a Miniature Synchronous Motor
4.3.4 The Attractive Invariant Manifold
Using the results found in proposition 1.6.7 together with (4.44) we can immediately write down the
explicit formula for the coefficient maps Sj
k,n :
S1
k,1(h) = [i(k ω(h) + 1)IR3 − A]
−1
αk(h) v
S1
−k,−1(h) = [i(−k ω(h) − 1)IR3 − A]
−1
αk(h) ¯v
S1
k,n(h) = 0 if |n| = 1
(4.45)
where ω(h) = Ω(P(h)) (cf. (1.99)). As mentioned in the introduction of section 4.3.3 we may confine
ourselves to the explicit computation of these coefficients.
In what follows we will list the Maple [15] –procedures corresponding to the quantities discussed in
order to enable the reader to reproduce the results found here. We start with the procedure used to
define S1
k,1, S1
−k,−1 (for |k| smaller than a given integer M):
S1_build := proc(kappa,alpha,alphacc)
local k,SS;
global Omega,M,v,vb,a;
SS[1] := table([seq(k = scalarmul(multiply(inverse(scalarmul(Id3,
I*(k*Omega(kappa,a)+1))-A),v),alpha[k]),k = -M .. M)]);
SS[-1] := table([seq(-k = scalarmul(multiply(inverse(scalarmul(Id3,
I*(-k*Omega(kappa,a)-1))-A),vb),alphacc[k]),k = -M .. M)]);
table([seq((k,-1) = evalm(SS[-1][k]),k = -M .. M),seq((k,1) = evalm(SS[1][k]),
k = -M .. M)])
end
(The variable ”kappa” will be defined in definition 4.3.2. The expression ”alphacc” symbolizes the
conjugate complex of ”alpha”.)](https://image.slidesharecdn.com/134355b9-c3ce-41ca-8cf9-85f751f98ea6-160201091932/85/Invariant-Manifolds-Passage-through-Resonance-Stability-and-a-Computer-Assisted-Application-to-a-Synchronous-Motor-166-320.jpg)
![4.3. Explicit Formulae for the Reduced System, Following Chapter 1 153
4.3.5 Main Result of Section 4.3
Combining the results derived in the preceding two subsections we now are in the position to evaluate
the formula given in (4.38) for g2
k,n. We will see that due to the theory deduced in chapter 2 we may
restrict ourselves to the cases where (k, n) = (0, 0) or n < 0 < k.
In a first step we collect the terms in (4.43)–(4.45) which contribute to the sum appearing in (4.36) for
(k, n) = (0, 0):
g2
0,0(h) =
k∈Z
F1,1
k,n,3(h) S1
−k,−1(h) + F1,1
−k,−n,3(h) S1
k,1(h) + F2,0
0,0,3(h)
= 1
d
dh H(0,P(h))
k∈Z
αβk(h)| ζ+
1 S1
−k,−1(h) + αβ−k(h) ζ−
1 S1
−k,−1(h)
+ αβ−k(h) ζ+
−1 S1
k,1(h) + αβk(h) ζ−
−1 S1
k,1(h)
+ β0(h)| z0
0 + aβ0(h)| z+
0 + αβ0(h) z−
0
− ̺ bβ0(h)
0
1
− (m + ̺) β0(h)
0
1
− aβ0(h) + aβ0(h)
0
1
2
. (4.46)
evalG00 := proc(beta, alphabeta, abeta, bbeta, alphabetacc, abetacc, bbetacc, zeta, z, S)
local G00, k;
global apar, M, cutoff, rho, m;
G00 := 0;
for k from -M to M do
G00 := G00
+ evalf(dotprod(alphabeta[k], multiply(zeta[1][1], S[-k, -1]),’orthogonal’))
+ evalf(dotprod(alphabetacc[-k],multiply(zeta[-1][1], S[-k, -1]), ’orthogonal’))
+ evalf(dotprod(alphabeta[-k], multiply(zeta[1][-1], S[k, 1]),’orthogonal’))
+ evalf(dotprod(alphabetacc[k],multiply(zeta[-1][-1], S[k, 1]), ’orthogonal’))
od;
G00 := G00 + normal(dotprod(beta[0], z[0][0], ’orthogonal’), expanded)
+ normal(dotprod(abeta[0], z[1][0], ’orthogonal’),expanded)
+ normal(dotprod(abetacc[0], z[-1][0], ’orthogonal’), expanded);
G00 := G00 - rho*normal(dotprod(bbeta[0], vector([0, 1]), ’orthogonal’), expanded);
G00 := G00 - (m + rho)*normal(dotprod( evalm(beta[0] - 1/2*abeta[0] - 1/2*abetacc[0]),
vector([0, .5]), ’orthogonal’), expanded);
if abs(Im(G00)) < cutoff then G00 := evalc(Re(G00))
else print(‘## E R R O R : ## cutoff too small in evalG00(..) : Im(G00)=‘, Im(G00))
fi;
G00
end](https://image.slidesharecdn.com/134355b9-c3ce-41ca-8cf9-85f751f98ea6-160201091932/85/Invariant-Manifolds-Passage-through-Resonance-Stability-and-a-Computer-Assisted-Application-to-a-Synchronous-Motor-167-320.jpg)
![154 Chapter 4. Application to a Miniature Synchronous Motor
Carrying out the same step in the case when k = 0, n < 0, one gets the following expression:
g2
−k,−2(h) =
k1,k2∈Z
k1+k2=k
F1,1
−k1,−1,3(h) S1
−k2,−1(h) + F2,0
−k,−2,3(h)
= 1
d
dh H(0,P(h))
k1,k2∈Z
k1+k2=k
αβ−k1
(h) ζ+
−1 S1
−k2,−1(h) + αβk1
(h) ζ−
−1 S1
−k2,−1(h)
+ β−k(h)| z0
−2 + aβ−k(h) z+
−2 + αβk(h) z−
−2 (4.47)
and g2
k,n = 0 if n < 0 and n = −2.
evalGk2 := proc(k, beta, alphabeta, abeta, alphabetacc, abetacc, zeta, z, S)
local Gk2, k1, k2;
global M, cutoff;
Gk2 := 0;
for k1 from -M to M do
for k2 from -M to M do
if k1 + k2 = k then
Gk2 := Gk2
+ evalf(dotprod(alphabeta[-k1], evalm(multiply(zeta[1][-1],S[-k2, -1])),
’orthogonal’));
+ evalf(dotprod(alphabetacc[k1], evalm(multiply(zeta[-1][-1],S[-k2, -1])),
’orthogonal’))
fi
od;
od;
Gk2 := Gk2 + normal(dotprod(beta[-k], z[0][-2], ’orthogonal’), expanded);
Gk2 := Gk2 + normal(dotprod(abeta[-k], z[1][-2], ’orthogonal’), expanded);
Gk2 := Gk2 + normal(dotprod(abetacc[k], z[-1][-2], ’orthogonal’), expanded);
2*abs(Gk2)
end](https://image.slidesharecdn.com/134355b9-c3ce-41ca-8cf9-85f751f98ea6-160201091932/85/Invariant-Manifolds-Passage-through-Resonance-Stability-and-a-Computer-Assisted-Application-to-a-Synchronous-Motor-168-320.jpg)
![4.3. Explicit Formulae for the Reduced System, Following Chapter 1 155
4.3.6 The Calculation of the Fourier Coefficients
We have seen in the preceeding chapters that the maps g2
0,0 and g2
km,−2 play a crucial role in the analysis
of the system under investigation. In order to apply the results derived there we need more information
about the properties of these maps g2
0,0 and g2
−k,−2. Due to the complexity of the explicit formulae (4.46)
and (4.47) we will gain this information by approximating these expressions numerically. Aiming on such
numerical evaluations it is necessary to find a way to compute the values βk(h), αβk(h), aβk(h) and
bβk(h) arising in (4.46) and (4.47). This is the purpose of this last subsection. As we will deal with
various sequences of Fourier–coefficients in what follows, we introduce the following notation.
Definition 4.3.1 The convolution x = (xk)k∈Z of the sequences y = (yk)k∈Z, z = (zk)k∈Z (where yk ∈ C
and zk ∈ Cn
, n ∈ N∗
) is defined as follows:
x = y ∗ z :=
k1,k2∈Z
k1+k2=k
yk1 zk2
k∈Z
. (4.48)
With the help of convolutions it will be possible to express the maps βk(h), αβk(h), aβk(h) and bβk(h)
in an easy way. Let us therefore introduce the following sequences:
Definition 4.3.2 In accordance with the notation found in [2] we introduce the following abbreviations
κ(h) :=
P(h)
a
q(h) := e−π
K(
√
1−κ(h)2
)
K(κ(h)) (4.49)
and define then sequences dn(h) = (dn(h)k)k∈Z, iκsn(h) = (iκsn(h)k)k∈Z and cn(h) = (cn(h)k)k∈Z by
dn(h)k =
π
K(κ(h))
q(h)|k|/2
1 + q(h)|k|
if k even
0 else
iκsn(h)k =
sgn(k)
π
K(κ(h))
q(h)|k|/2
1 − q(h)|k|
if k odd
0 else
cn(h)k =
π
κ(h) K(κ(h))
q(h)|k|/2
1 + q(h)|k|
if k odd
0 else
.
(4.50)
Note that considering the central domain, i.e. J = JC the limit h → ∞ corresponds to P(h) → a hence
κ → 1. If we consider regions in JC close to the border LJr we therefore focus on values κ 1. On
the other hand this border LJr is close to the separatrices of the unperturbed pendulum (cf. figure 1.2).
Hence the values κ 1 correspond to regions close to the separatrices. This is true for the cases J = JL
and J = JU as well.](https://image.slidesharecdn.com/134355b9-c3ce-41ca-8cf9-85f751f98ea6-160201091932/85/Invariant-Manifolds-Passage-through-Resonance-Stability-and-a-Computer-Assisted-Application-to-a-Synchronous-Motor-169-320.jpg)
![156 Chapter 4. Application to a Miniature Synchronous Motor
K := LegendreKc q := ( κ, pot ) → e
−
pot π LegendreKc1( κ )
LegendreKc( κ )
Ω := ( κ, a ) → evalf
1
4
π a
K( κ )
dn_build := proc(kappa)
local k,dn;
global K,q,M;
dn := table([seq(k = 0,k = -M .. M)]);
for k from -M to M do
if type(k,even) then
dn[k] := evalf(Pi/K(kappa)*q(kappa,1/2*abs(k))/(1+q(kappa,abs(k))))
fi
od;
table([seq(k = dn[k],k = -M .. M)])
end
iksn_build := proc(kappa)
local k,iksn;
global K,q,M;
iksn := table([seq(k = 0,k = -M .. M)]);
for k from -M to M do
if type(k,odd) then
iksn[k] := evalf(signum(k)*Pi/K(kappa)*q(kappa,1/2*abs(k))/(1-q(kappa,abs(k))))
fi
od;
table([seq(k = iksn[k],k = -M .. M)])
end
cn_build := proc(kappa)
local k,cn;
global K,q,M;
cn := table([seq(k = 0,k = -M .. M)]);
for k from -M to M do
if type(k,odd) then
cn[k] := evalf(Pi/kappa/K(kappa)*q(kappa,1/2*abs(k))/(1+q(kappa,abs(k))))
fi
od;
table([seq(k = cn[k],k = -M .. M)])
end](https://image.slidesharecdn.com/134355b9-c3ce-41ca-8cf9-85f751f98ea6-160201091932/85/Invariant-Manifolds-Passage-through-Resonance-Stability-and-a-Computer-Assisted-Application-to-a-Synchronous-Motor-170-320.jpg)
![4.3. Explicit Formulae for the Reduced System, Following Chapter 1 157
In a first step we express the quantities ak(h) :
Lemma 4.3.3 Recall the Fourierseries ei˜q(ϕ,P(h))
=
k∈Z
ak(h) eikϕ
introduced in (4.3.3). The series
a(h) := (ak(h))k∈Z is given by
a(h) = (dn(h) + iκsn(h)) ∗ (dn(h) + iκsn(h)) . (4.51)
PROOF: As explained in (4.17) the solution (q(t; 0, p0), p(t; 0, p0)) of system (4.16) which is used in
(4.37) to define the maps ˜q(ϕ, P(h)), ˜p(ϕ, P(h)) may be expressed using the Jacobian Elliptic Function :
sin(1
2 q(t; 0, p0)) =
p0
a
sn
a
2
t;
p0
a
p(t; 0, p0) = p0 cn
a
2
t;
p0
a
.
On one hand the second equation of (4.16) implies therefore
−
a
2
2
sin(q(t; 0, p0)) =
d
dt
p(t; 0, p0) =
d
dt
p0 cn
a
2
t;
p0
a
BF
=
731.02
−
a
2
p0 sn
a
2
t;
p0
a
dn
a
2
t;
p0
a
.
(Here and in all subsequent sections the notation
BF
=
731.02
refers to the corresponding formula given in [2]).
Taking this last equation and applying (4.37) yields
sin(˜q(ϕ, P(h))) = sin(q( ϕ
Ω(P(h)) ; 0, P(h)))
= 2
a P(h) sn a
2
ϕ
Ω(P(h)) ; P(h)
a dn a
2
ϕ
Ω(P(h)) ; P(h)
a
= 2 κ(h) sn a
2
ϕ
Ω(P(h)) ; P(h)
a dn a
2
ϕ
Ω(P(h)) ; P(h)
a .
Thus by (4.18)
sin(˜q(ϕ, P(h))) = 2 κ(h) sn ϕ
2π 4 K(κ(h)); κ(h) dn ϕ
2π 4 K(κ(h)); κ(h) . (4.52)
On the other hand we use the identity
P(h)
2
2
= H(0, P(h)) = H(q(t; 0, P(h)), p(t; 0, P(h))) =
p(t; 0, P(h))2
2
+
a
2
2
(1 − cos(q(t; 0, P(h))))
to express cos(q(t; 0, P(h))) as follows:
cos(q(t; 0, P(h))) = 1 +
2
a
2
p(t; 0, P(h))2
2
−
P(h)
2
2
= 1 +
2
a
2
P(h)2
2
cn
a
2
t; κ(h)
2
− 1
= 1 + 2 κ(h)
2
cn
a
2
t; κ(h)
2
− 1
BF
=
121.00
1 − 2 κ(h)2
sn
a
2
t; κ(h)
2
,](https://image.slidesharecdn.com/134355b9-c3ce-41ca-8cf9-85f751f98ea6-160201091932/85/Invariant-Manifolds-Passage-through-Resonance-Stability-and-a-Computer-Assisted-Application-to-a-Synchronous-Motor-171-320.jpg)
![158 Chapter 4. Application to a Miniature Synchronous Motor
which again by (4.18) implies
cos(˜q(ϕ, P(h))) = 1 − 2 κ(h)
2
sn ϕ
2π 4 K(κ(h)); κ(h)
2
. (4.53)
Using Eulers equation we write (4.52) and (4.53) in complex form :
ei˜q(ϕ,P(h))
= cos(˜q(ϕ, P(h))) + i sin(˜q(ϕ, P(h)))
= 1 − 2 κ(h)2
sn ϕ
2π 4 K(κ(h)); κ(h)
2
+ i 2 κ(h) sn ϕ
2π 4 K(κ(h)); κ(h) dn ϕ
2π 4 K(κ(h)); κ(h)
BF
=
121.00
κ(h)
2
sn ϕ
2π 4 K(κ(h)); κ(h)
2
+ dn ϕ
2π 4 K(κ(h)); κ(h)
2
− 2 κ(h)
2
sn ϕ
2π 4 K(κ(h)); κ(h)
2
+ i 2 κ(h) sn ϕ
2π 4 K(κ(h)); κ(h) dn ϕ
2π 4 K(κ(h)); κ(h)
= dn ϕ
2π 4 K(κ(h)); κ(h) + i κ(h) sn ϕ
2π 4 K(κ(h)); κ(h)
2
such that
ei˜q(ϕ,P(h))/2
= dn ϕ
2π 4 K(κ(h)); κ(h) + i κ(h) sn ϕ
2π 4 K(κ(h)); κ(h) . (4.54)
Since the Fourier Series of the Jacobian Elliptic Functions are known (cf. [2] formulae 908) we are able
to find the corresponding series for ei˜q(ϕ,P(h))/2
. According to the tables given in [2] let therefore q(h) be
as defined in (4.49). Then
dn ϕ
2π 4 K(κ(h)); κ(h)
BF
=
908.03
π
2K(κ(h)) + 2π
K(κ(h))
m≥0
q(h)m+1
1+q(h)2(m+1) cos (m + 1) π
K(κ(h))
ϕ
2π 4 K(κ(h))
= π
2K(κ(h)) + 2π
K(κ(h))
m≥0
q(h)m+1
1+q(h)2(m+1) cos (2(m + 1) ϕ)
= π
2K(κ(h)) + π
K(κ(h))
m≥0
q(h)m+1
1+q(h)2(m+1) ei2(m+1) ϕ
+ e−i2(m+1)ϕ
= π
2K(κ(h)) + π
K(κ(h))
k>0
even
q(h)k/2
1+q(h)k eikϕ
+ e−ikϕ
and in a similar way
i κ(h) sn ϕ
2π 4 K(κ(h)); κ(h)
BF
=
908.01
iκ(h) 2π
κ(h)K(κ(h))
m≥0
q(h)m+1/2
1−q(h)2m+1 sin (2m + 1) π
2K(κ(h))
ϕ
2π 4 K(κ(h))
= i 2π
K(κ(h))
m≥0
q(h)m+1/2
1−q(h)2m+1 sin ((2m + 1) ϕ)
= π
K(κ(h))
m≥0
q(h)m+1/2
1−q(h)2m+1 ei(2m+1) ϕ
− e−i(2m+1)ϕ
= π
K(κ(h))
k>0
odd
q(h)k/2
1−q(h)k eikϕ
− e−ikϕ
.
These identities correspond to definition 4.3.2 of the coefficients dn(h)k and iκsn(h)k. It then follows
from (4.54) that
ei˜q(ϕ,P(h))/2
=
k∈Z
(dn(h) + iκsn(h))k eikϕ
=
k∈Z
(dn(h)k + iκsn(h)k) eikϕ
.](https://image.slidesharecdn.com/134355b9-c3ce-41ca-8cf9-85f751f98ea6-160201091932/85/Invariant-Manifolds-Passage-through-Resonance-Stability-and-a-Computer-Assisted-Application-to-a-Synchronous-Motor-172-320.jpg)
![4.3. Explicit Formulae for the Reduced System, Following Chapter 1 159
For the expansion (4.42) we thus find
k∈Z
ak(h) eikϕ
= ei˜q(ϕ,P(h))
= ei˜q(ϕ,P(h))/2
· ei˜q(ϕ,P(h))/2
=
k∈Z
(dn(h) + iκsn(h))k eikϕ
·
k∈Z
(dn(h) + iκsn(h))k eikϕ
=
k1,k2∈Z
(dn(h) + iκsn(h))k1
(dn(h) + iκsn(h))k2
ei(k1+k2)ϕ
such that
ak(h) =
k1,k2∈Z
k1+k2=k
(dn(h) + iκsn(h))k1
(dn(h) + iκsn(h))k2
= ((dn(h) + iκsn(h)) ∗ (dn(h) + iκsn(h)))k
i.e. a = (dn(h) + iκsn(h)) ∗ (dn(h) + iκsn(h)) as claimed. This completes the proof of lemma 4.3.3.
a_build := proc(dn,iksn)
local u,k;
global M;
u :=table([seq(k = dn[k]+iksn[k],k = -M .. M)]);
ComplexFold(u,u)
end
The next lemma provides similar formulae for the Fourier series ˜p(ϕ, P(h)) =
k∈Z
bk(h) eikϕ
.
Lemma 4.3.4 The series b(h) := (b(h)k)k∈Z of Fourier coefficients for ˜p(ϕ, P(h)) =
k∈Z
bk(h) eikϕ
is
given by
b(h) = P(h) cn(h) = a κ(h) cn(h), (4.55)
where cn(h) denotes the sequence defined in (4.51).
PROOF: From the definitions (4.37), (4.3.3) together with (4.17) we have
k∈Z
bk(h) eikϕ
= ˜p(ϕ, P(h)) = p( ϕ
Ω(P(h)) , 0, P(h)) = P(h) cn a
2
ϕ
Ω(P(h)) ; P(h)
a = P(h) cn ϕ
2π 4 K(κ(h)); κ(h) .](https://image.slidesharecdn.com/134355b9-c3ce-41ca-8cf9-85f751f98ea6-160201091932/85/Invariant-Manifolds-Passage-through-Resonance-Stability-and-a-Computer-Assisted-Application-to-a-Synchronous-Motor-173-320.jpg)
![160 Chapter 4. Application to a Miniature Synchronous Motor
Rewriting the Fourier series 908.02 in [2] yields
cn ϕ
2π 4 K(κ(h)); κ(h) = 2π
κ(h)K(κ(h))
m≥0
q(h)m+1/2
1+q(h)2m+1 cos (2m + 1) π
2K(κ(h))
ϕ
2π 4 K(κ(h))
= 2π
κ(h)K(κ(h))
m≥0
q(h)m+1/2
1+q(h)2m+1 cos ((2m + 1) ϕ)
=
π
κ(h) K(κ(h))
m≥0
q(h)m+1/2
1+q(h)2m+1 ei(2m+1) ϕ
+ e−i(2m+1)ϕ
=
π
κ(h) K(κ(h))
k>0
odd
q(h)k/2
1+q(h)k eikϕ
+ e−ikϕ
thus for cn(h)k as defined in (4.50), we obtain bk(h) = P(h) cn(h)k as claimed.
b_build := proc(kappa,cn)
local k;
global a,M;
table([seq(k = evalf(a*kappa*cn[k]),k = -M .. M)])
end
With the help of the maps ak(h), bk(h) it now is possible to express βk(h), αβk(h), aβk(h) and bβk(h),
using appropriate convolutions again.
Lemma 4.3.5 The sequences of coefficient maps defined in (4.3.3) are given by the following identities :
α(h) = a(h) − (. . . , 0, 1, 0, . . .) β(h) =
−i a2
2 (iκsn(h) ∗ dn(h))
b(h)
αβ(h) = α(h) ∗ β(h) aβ(h) = a(h) ∗ β(h) bβ(h) = b(h) ∗ β(h). (4.56)
PROOF: Recalling
k∈Z
αk(h) eikϕ
= ei˜q(ϕ,P(h))
− 1 =
k∈Z
ak(h) eikϕ
− 1 =
k=0
ak(h) eikϕ
+ (a0(h) − 1) ,
the first identity follows at once. Using equation (4.52) we write
a
2
2
sin(˜q(ϕ, P(h))) = −2 i a
2
2 i
2 sin(˜q(ϕ, P(h)))
= −2 i a
2
2
i κ(h) sn ϕ
2π 4 K(κ(h)); κ(h) dn ϕ
2π 4 K(κ(h)); κ(h)
= −2 i a
2
2
k∈Z
iκsnk(h) eikϕ
k∈Z
dnk(h) eikϕ
= −2 i a
2
2
k∈Z
(iκsn(h) ∗ dn(h))k eikϕ
,](https://image.slidesharecdn.com/134355b9-c3ce-41ca-8cf9-85f751f98ea6-160201091932/85/Invariant-Manifolds-Passage-through-Resonance-Stability-and-a-Computer-Assisted-Application-to-a-Synchronous-Motor-174-320.jpg)
![4.3. Explicit Formulae for the Reduced System, Following Chapter 1 161
implying
k∈Z
βk(h) eikϕ
= ∇H(Φ(ϕ, h)) =
a
2
2
sin(˜q(ϕ, P(h)))
˜p(ϕ, P(h))
=
−2 i a
2
2
k∈Z
(iκsn(h) ∗ dn(h))k eikϕ
k∈Z
bk(h) eikϕ
.
Thus the second statement follows immediately by comparing coefficients of eikϕ
, k ∈ Z. The proof of
the remaining identities is a simple consequence of (4.3.3) and therefore omitted.
alpha_build := proc(a)
local k,alpha;
global M;
alpha := table([seq(k = a[k],k = -M .. M)]);
alpha[0] := evalf(a[0]-1);
table([seq(k = alpha[k],k = -M .. M)])
end
beta_build := proc(iksn,dn,b)
local iksndn,k;
global M,apar;
iksndn := ComplexFold(iksn,dn);
table([seq(k = vector([evalf(-1/2*I*apar^2*iksndn[k]),b[k]]),k = -M .. M)])
end
alphabeta_build := proc(alpha,beta)
local beta1,beta2,k,bg1,bg2;
global M;
beta1 :=table([seq(k = beta[k][1],k = -M .. M)]);
beta2 :=table([seq(k = beta[k][2],k = -M .. M)]);
bg1 := ComplexFold(alpha,beta1);
bg2 := ComplexFold(alpha,beta2);
table([seq(k = vector([bg1[k],bg2[k]]),k = -M .. M)])
end
abeta_build := proc(a,beta)
local beta1,beta2,k,bg1,bg2;
global M;
beta1 :=table([seq(k = beta[k][1],k = -M .. M)]);
beta2 :=table([seq(k = beta[k][2],k = -M .. M)]);
bg1 := ComplexFold(a,beta1);
bg2 := ComplexFold(a,beta2);
table([seq(k = vector([bg1[k],bg2[k]]),k = -M .. M)])
end](https://image.slidesharecdn.com/134355b9-c3ce-41ca-8cf9-85f751f98ea6-160201091932/85/Invariant-Manifolds-Passage-through-Resonance-Stability-and-a-Computer-Assisted-Application-to-a-Synchronous-Motor-175-320.jpg)
![162 Chapter 4. Application to a Miniature Synchronous Motor
bbeta_build := proc(b, beta)
local beta1, beta2, k, bg1, bg2;
global M;
beta1 := table([seq(k = beta[k][1], k = -M .. M)]);
beta2 := table([seq(k = beta[k][2], k = -M .. M)]);
bg1 := ComplexFold(b, beta1);
bg2 := ComplexFold(b, beta2);
table([seq(k = vector([bg1[k], bg2[k]]), k = -M .. M)])
end
alphacc_build := proc(alpha)
local k;
global M;
table([seq(k = conjugate(alpha[k]),k = -M .. M)])
end
alphabetacc_build := proc(alphabeta)
local k;
global M;
table([ seq(k = vector([conjugate(alphabeta[k][1]), conjugate(alphabeta[k][2])]),
k = -M .. M)])
end
abetacc_build := proc(abeta)
local k;
global M;
table([seq(k = vector([conjugate(abeta[k][1]), conjugate(abeta[k][2])]), k = -M .. M)])
end
bbetacc_build := proc(bbeta)
local k;
global M;
table([seq( k = vector([conjugate(bbeta[k][1]), conjugate(bbeta[k][2])]), k = -M .. M)])
end](https://image.slidesharecdn.com/134355b9-c3ce-41ca-8cf9-85f751f98ea6-160201091932/85/Invariant-Manifolds-Passage-through-Resonance-Stability-and-a-Computer-Assisted-Application-to-a-Synchronous-Motor-176-320.jpg)
![4.4. Preliminary Remarks on Numerical Evaluation 163
4.4 Preliminary Remarks on Numerical Evaluation
4.4.1 The Choice of the Parameters ε and a
Let us recall that the maps g2
0,0 and g2
km,−2 do not depend on the perturbation parameter ε but on the
single parameter a.
We therefore will not find ourselves in the position to discuss the choice for ε under which the numerical
and theoretical results match. The results found here are independent on ε and valid provided that ε is
chosen sufficiently small for the theoretical considerations carried out in the first three chapters.
By way of contrast the computations carried out numerically depend strongly on the value chosen for the
parameter a. We therefore will present results for a variety of choices of this parameter. As the parameter
a varies in [0.54, 20.38] in technical considerations we will choose the values a = 0.54 and a = 20.38 when
performing the actual numerical evaluation. As we have found an interesting behaviour of the solutions
for a = 4.1 in the numerical simulations described in section 4.2.2 we will examine this value for a as
well.
4.4.2 The Independence on the Map P
The qualitative behaviour of system (1.158) does not depend on the choice of the map P considered in
1.97 a–1.97 d. (The main reason for introducing P was to handle regularity problems hence a technical
matter (cf. section 1.3.4).) For the numerical results to be independent of P we proceed as follows:
Recalling the formulae (4.45)–(4.47) for g2
0,0, g2
km,−2 and S1
±k,±1 we see that the quantities
d
dh H(0, P(h)) g2
0,0(h) and d
dh H(0, P(h)) g2
km,−2(h)
may be expressed in terms of ω(h), constant matrices and vectors as well as the Fourier coefficient maps
αk(h), βk(h), αβk(h), aβk(h) and bβk(h). Moreover it follows from the formulae found in section 4.3.6
and particularly (4.49), (4.50) that these coefficient maps depend on h via the function q(h), hence via
κ(h) = P(h)
a . Therefore there exist maps G0,0 and G−k,−2, independent on P and defined for κ ∈ [0, 1),
satisfying
G0,0(κ(h)) = d
dh H(0, P(h)) g2
0,0(h) and G−k,−2(κ(h)) = 2 d
dh H(0, P(h)) g2
km,−2(h) . (4.57)
We therefore will compute the values of G0,0, G−k,−2, avoiding to fix a map P. Note that in a res-
onance h = hm it follows from the last identities together with (2.30) that the inequalities |a0| >
(ac
1)
2
+ (as
1)
2
(cf. lemma 2.3.4) and |a0| < (ac
1)
2
+ (as
1)
2
(cf. lemma 2.3.5) respectively are equiv-
alent to |G0,0(κ(hm))| > G−k,−2(κ(hm)) and |G0,0(κ(hm))| < G−k,−2(κ(hm)). Thus the comparison of
|G0,0(κ(hm))| with G−k,−2(κ(hm)) enables us to decide if either of the situations discussed in section 2.3.3
and section 2.3.4 applies, i.e. if all solutions or only most of the solutions pass the resonance.
For the discussion in the outer zones (cf. proposition 2.3.1) it suffices to gain information on the sign of
g2
0,0(h). From the identities (4.49), (4.57) together with the explicit form (4.1.3) of the Hamiltonian this
is given by
g2
0,0(h) =
G0,0(κ(h))
d
dh P(h) a κ(h)
.](https://image.slidesharecdn.com/134355b9-c3ce-41ca-8cf9-85f751f98ea6-160201091932/85/Invariant-Manifolds-Passage-through-Resonance-Stability-and-a-Computer-Assisted-Application-to-a-Synchronous-Motor-177-320.jpg)

![4.4. Preliminary Remarks on Numerical Evaluation 165
4.4.3 How to Determine Resonances
Let us first note that by consequence of (4.36), (4.38), (4.43) and (4.45) the maps g2
k,n vanish if |n| ∈ {0, 2}.
Thus the set R of resonant frequencies as defined in GA 2.2 is given by
R = q ∈ Q | q ∈ [Ω(Jr), Ω(0)], ∃k ∈ Z : q = −2
k
= q ∈ Q q ∈
a
2
2π
4 K(Jr
a )
,
a
2
, ∃k ∈ N∗
: q = 2
k
Hence by solving the equations Ω(κ, a) = a
2
2π
4 K(κ) = 2
k with respect to κ we obtain a family
{(km, κkm ) | m = 1..M} of solutions such that the resonances h ∈ H appearing here are given by κ(hm) =
κkm .
As the Fourier coefficients g2
k,n are of size O(1/k3
) (cf. remark 1.6.10) we determine the resonances for
|k| ≤ kmax only. The value kmax ∈ N∗
is chosen in a way such that the corresponding values 2 g2
k,n(κkm )
are smaller than g2
0,0(κkm ), hence passage through resonance takes place for all the resonances with indices
k ≥ kmax (cf. section 2.3.4).
DetectResonances := proc(kmax,kappa1,kappa2)
local Resonances,Res,k,kappa,j;
global Omega,apar;
j := 0;
Resonances := array(1 .. kmax);
printf(‘******************* Detection of Resonances ***********************‘);
lprint();
for k to kmax do
Res := fsolve(Omega(kappa,apar) = 2/k,kappa,kappa1 .. kappa2);
if type(Res,float) then
j := j+1;
Resonances[j] := [k,Res];
printf(‘2 : %g-Resonance in %g......‘,k,Res);
lprint()
fi
od;
printf(‘******************* DETECTION COMPLETE ***********************‘);
lprint();
[j,table([seq(k = Resonances[k],k = 1 .. j)])]
end
In figure 4.17 a plot of the map Ω over κ and a is shown. The level curves Ω = 2
k found via the procedure
”DetectResonances” are depicted in figure 4.18 : The curves for Ω = 2 : 1, Ω = 2 : 2 and Ω = 2 : 3 (most
right to left) are clearly visible, while the curves for larger k approache the level curve Ω = 0 (i.e. a = 0).](https://image.slidesharecdn.com/134355b9-c3ce-41ca-8cf9-85f751f98ea6-160201091932/85/Invariant-Manifolds-Passage-through-Resonance-Stability-and-a-Computer-Assisted-Application-to-a-Synchronous-Motor-179-320.jpg)


![168 Chapter 4. Application to a Miniature Synchronous Motor
4.4.5 Finite Convolution via Discrete Fourier Transformation
We refer the reader to [16], pages 111 ff.
calcM := proc(m) 2^(m-2)-1 end
My2Maple := proc(alpha)
local Re_a,Im_a,k;
global M;
Re_a := table([seq(k=evalc(Re(alpha[k-M])),k = 0 .. 2*M),seq(k = 0,k = 2*M+1 .. 4*M+3)]);
Im_a := table([seq(k=evalc(Im(alpha[k-M])),k = 0 .. 2*M),seq(k = 0,k = 2*M+1 .. 4*M+3)]);
[array([seq(Re_a[k],k = 0 .. 4*M+3)]),array([seq(Im_a[k],k = 0 .. 4*M+3)])]
end
LinConv := proc(Re_a, Im_a, Re_b, Im_b)
local k, DFT_a, DFT_b, Re_DFT_a, Im_DFT_a, Re_DFT_b, Im_DFT_b,
Re_ab, Im_ab;
global M, mm;
Re_DFT_a := copy(Re_a);
Im_DFT_a := copy(Im_a);
Re_DFT_b := copy(Re_b);
Im_DFT_b := copy(Im_b);
evalhf(FFT(mm, var(Re_DFT_a), var(Im_DFT_a)));
evalhf(FFT(mm, var(Re_DFT_b), var(Im_DFT_b)));
Re_ab := array([seq( Re_DFT_a[k]*Re_DFT_b[k] - Im_DFT_a[k]*Im_DFT_b[k],k=1 .. 4*M + 4)]);
Im_ab := array([seq( Re_DFT_a[k]*Im_DFT_b[k] + Im_DFT_a[k]*Re_DFT_b[k],k=1 .. 4*M + 4)]);
evalhf(iFFT(mm, var(Re_ab), var(Im_ab)));
[array([seq(Re_ab[k], k = 1 .. 4*M + 4)]), array([seq(Im_ab[k], k = 1 .. 4*M + 4)])]
end
shift2M := proc(Re_a,Im_a)
local k;
global M,cutoff;
for k from -M to M do
if abs(Re_a[2*M+k+1]) < cutoff then Re_a[2*M+k+1] := 0 fi;
if abs(Im_a[2*M+k+1]) < cutoff then Im_a[2*M+k+1] := 0 fi
od;
table([seq(k = Re_a[2*M+k+1]+I*Im_a[2*M+k+1],k = -M .. M)])
end
ComplexFold := proc(alpha1,alpha2)
local k,a,b,ab;
a := My2Maple(alpha1);
b := My2Maple(alpha2);
ab := LinConv(a[1],a[2],b[1],b[2]);
ab := shift2M(ab[1],ab[2])
end](https://image.slidesharecdn.com/134355b9-c3ce-41ca-8cf9-85f751f98ea6-160201091932/85/Invariant-Manifolds-Passage-through-Resonance-Stability-and-a-Computer-Assisted-Application-to-a-Synchronous-Motor-182-320.jpg)
![4.4. Preliminary Remarks on Numerical Evaluation 169
4.4.6 Additional Programmcode
For the interested reader we provide here the remaining code which was used to generate the output
presented in section 4.5.
MakeG00datas := proc(mm, grid, kappa1, kappa2)
local i, kappa, G00, G00val, dn, iksn, cn, u, a, b, alpha,
alphacc, beta, betacc, alphabeta, alphabetacc, abeta, bbeta,
abetacc, bbetacc, S, starti, endi;
global apar, zeta, z, rho, m, M, v, vb;
G00 := array(0 .. grid);
printf(‘******************* Calculation of G_0,0(kappa) ***********************n‘);
printf(‘--> parameter a=%g rho=%g m=%gn‘, apar, rho, m);
printf(‘--> kappa in [%g, %g]n‘, kappa1, kappa2);
printf(‘--> kappa-steps = %g n‘, (kappa2 - kappa1)/grid);
printf(‘(4*M is the size of arrays used during Discrete Fourier Transformation)n‘);
printf(‘--------------------------------------------------------------------------n‘);
printf(‘| M | kappa | G_0,0(kappa)/(a*kappa) | G_0,0(kappa)/(a*kappa)^2 |‘);
print();
M := calcM(mm);
if kappa1 = 0 then starti := 1 else starti := 0 fi;
if kappa2 = 1 then endi := grid - 1 else endi := grid fi;
for i from starti to endi do
kappa := kappa1 + i*(kappa2 - kappa1)/grid;
dn := dn_build(kappa);
iksn := iksn_build(kappa);
cn := cn_build(kappa);
a := a_build(dn, iksn);
b := b_build(kappa, cn);
alpha := alpha_build(a);
beta := beta_build(iksn, dn, b);
alphabeta := alphabeta_build(alpha, beta);
abeta := abeta_build(a, beta);
bbeta := bbeta_build(b, beta);
alphacc := alphacc_build(alpha);
alphabetacc := alphabetacc_build(alphabeta);
abetacc := abetacc_build(abeta);
bbetacc := bbetacc_build(bbeta);
S := S1_build(kappa, alpha, alphacc);
G00val := evalG00(beta,alphabeta,abeta,bbeta,alphabetacc,abetacc,bbetacc,zeta,z,S);
G00[i] := [kappa, G00val/(apar*kappa)];
printf(‘| %2.0f | %1.10f | %+1.10f | %+1.10f |‘,
M, kappa, G00val/(apar*kappa), G00val/(apar^2*kappa^2));
print()
od;
printf(‘******************** CALCULATION COMPLETE ******************n‘);
[seq(G00[i], i = starti .. endi)]
end](https://image.slidesharecdn.com/134355b9-c3ce-41ca-8cf9-85f751f98ea6-160201091932/85/Invariant-Manifolds-Passage-through-Resonance-Stability-and-a-Computer-Assisted-Application-to-a-Synchronous-Motor-183-320.jpg)
![170 Chapter 4. Application to a Miniature Synchronous Motor
MakeGk2datas := proc(k, mm, grid, kappa1, kappa2, Resh)
local i, starti, endi, kappa, Gk2, Gk2val, G00val, bbeta, bbetacc,
dn, iksn, cn, a, b, alpha, alphacc, beta, alphabeta, alphabetacc,
abeta, abetacc, S, passStr, mmm;
global apar, zeta, z, M, v, vb;
Gk2 := array(0 .. grid);
lprint();
printf(‘n**************** Calculation of 2*|G_{-k,2}(kappa)| *****************‘);
lprint();
printf(‘--> parameter a=%g rho=%g m=%gn‘, apar, rho, m);
printf(‘--> 2 : %g Resonance in %g n‘, k, Resh);
printf(‘--> kappa in [%g, %g]n‘, kappa1, kappa2);
printf(‘--> kappa-steps = %g‘, (kappa2 - kappa1)/grid);
lprint();
printf(‘(4*M is the size of arrays used during Discrete Fourier Transformation)n‘);
printf(‘-----------------------------------------------------------------------n‘);
printf(‘| M | kappa | G_%g,2(kappa)/(a*kappa) | G_0,0(kappa)/(a*kappa)
| passage |‘, -k);
print();
if kappa1 = 0 then starti := 1 else starti := 0 fi;
if kappa2 = 1 then endi := grid - 1 else endi := grid fi;
for i from starti to endi do
kappa := kappa1 + i*(kappa2 - kappa1)/grid;
M := calcM(mm);
mmm := mm;
while evalb(M < abs(k)) do
mmm := mmm + 1; M := calcM(mmm)
od;
dn := dn_build(kappa);
iksn := iksn_build(kappa);
cn := cn_build(kappa);
a := a_build(dn, iksn);
b := b_build(kappa, cn);
alpha := alpha_build(a);
beta := beta_build(iksn, dn, b);
alphabeta := alphabeta_build(alpha, beta);
abeta := abeta_build(a, beta);
bbeta := bbeta_build(b, beta);
alphacc := alphacc_build(alpha);
alphabetacc := alphabetacc_build(alphabeta);
abetacc := abetacc_build(abeta);
bbetacc := bbetacc_build(bbeta);
S := S1_build(kappa, alpha, alphacc);
Gk2val := evalGk2(k, beta, alphabeta, abeta, alphabetacc, abetacc, zeta, z, S);
Gk2[i] := [kappa, Gk2val/(apar*kappa)];
G00val := evalG00(beta,alphabeta,abeta,bbeta,alphabetacc,abetacc,bbetacc,zeta,z,S);
if abs(G00val) > Gk2val then passStr := ‘ certain ‘
else passStr := ‘ mostly ‘
fi;
printf(‘| %2.0f | %1.10f | %+1.10f | %+1.10f |%s|‘,
M, kappa, Gk2val/(apar*kappa), G00val/(apar*kappa), passStr);
print()
od;
printf(‘******************** CALCULATION COMPLETE *************************n‘);
[seq(Gk2[i], i = starti .. endi)]
end](https://image.slidesharecdn.com/134355b9-c3ce-41ca-8cf9-85f751f98ea6-160201091932/85/Invariant-Manifolds-Passage-through-Resonance-Stability-and-a-Computer-Assisted-Application-to-a-Synchronous-Motor-184-320.jpg)
![4.4. Preliminary Remarks on Numerical Evaluation 171
RunIt := proc(kappa1, kappa2, grid, Resgrid, mm, delta, CalculateResonances)
local ResonanceList, k, j, G00Plot, G00Plotdata, Gk2Plot,
Gk2Plotdata, Plot00Title, ommin, kmin, kmax, Plotk2Title,
Filek2Name, kap1, kap2, ResNr, Resh, Output;
global apar, rho, m, M, zeta, z;
M := calcM(mm);
Plot00Title := cat(‘G_0,0(kappa) ( abar=‘,convert(apar, name), ‘ , rho=‘,
convert(evalf(rho, 3), name), ‘ , m=‘, convert(m, name),‘ , M=‘,
convert(calcM(mm), name), ‘)‘);
G00Plotdata := MakeG00datas(mm, grid, kappa1, kappa2);
G00Plot := [Plot00Title, G00Plotdata];
if evalb(CalculateResonances) then
ommin := Omega(kappa2, apar);
kmin := trunc(6/ommin) + 1;
kmax := min(kmin, 10);
ResonanceList := DetectResonances(kmax, kappa1, kappa2);
if 0 < ResonanceList[1] then
Gk2Plot := array(1 .. ResonanceList[1]);
Gk2Plotdata := array(1 .. ResonanceList[1]);
for k to ResonanceList[1] do
ResNr := abs(ResonanceList[2][k][1]);
Resh := abs(ResonanceList[2][k][2]);
kap1 := Resh - delta;
kap2 := Resh + delta;
if kap1 < 0 then kap1 := Resh fi;
if 1 < kap2 then kap2 := Resh fi;
Gk2Plotdata[k] := MakeGk2datas(ResNr, mm, Resgrid, kap1, kap2, Resh);
Plotk2Title := cat(‘G_-‘, convert(ResNr, name), ‘,
2(kappa) ( abar=‘,
convert(apar, name), ‘ , rho=‘, convert(evalf(rho, 3), name), ‘m=‘,
convert(m, name), ‘M=‘, convert(calcM(mm), name), ‘)‘);
Gk2Plot[k] := [Plotk2Title, Gk2Plotdata[k]]
od
fi
else ResonanceList := [0]
fi;
[ResonanceList[1] + 2, G00Plot, seq(Gk2Plot[j], j = 1 .. ResonanceList[1])]
end](https://image.slidesharecdn.com/134355b9-c3ce-41ca-8cf9-85f751f98ea6-160201091932/85/Invariant-Manifolds-Passage-through-Resonance-Stability-and-a-Computer-Assisted-Application-to-a-Synchronous-Motor-185-320.jpg)


![174 Chapter 4. Application to a Miniature Synchronous Motor
upper domain :
*********************** Calculation of G_0,0(kappa) ***************************
--> parameter a=.54 rho=0 m=0
--> kappa in [0, .99]
--> kappa-steps = .0396
(4*M is the size of arrays used during Discrete Fourier Transformation)
---------------------------------------------------------------------------------
| M | kappa | G_0,0(kappa)/(a/kappa) | G_0,0(kappa)/(a/kappa)^2 |
| 63 | .0396000000 | -.0686447851 | -0.0050339509 |
| 63 | .0792000000 | -.1300828309 | -0.0190788152 |
| 63 | .1188000000 | -.1866895908 | -0.0410717099 |
| 63 | .1584000000 | -.2400945790 | -0.0704277431 |
| 63 | .1980000000 | -.2914430218 | -0.1068624413 |
| 63 | .2376000000 | -.3415132761 | -0.1502658415 |
| 63 | .2772000000 | -.3907754230 | -0.2005980505 |
| 63 | .3168000000 | -.4394220391 | -0.2577942629 |
| 63 | .3564000000 | -.4873850566 | -0.3216741374 |
| 63 | .3960000000 | -.5343471041 | -0.3918545430 |
| 63 | .4356000000 | -.5797537987 | -0.4676680642 |
| 63 | .4752000000 | -.6228324110 | -0.5480925217 |
| 63 | .5148000000 | -.6626210395 | -0.6316987243 |
| 63 | .5544000000 | -.6980104038 | -0.7166240146 |
| 63 | .5940000000 | -.7277974411 | -0.8005771852 |
| 63 | .6336000000 | -.7507462550 | -0.8808756058 |
| 63 | .6732000000 | -.7656480610 | -0.9545079160 |
| 63 | .7128000000 | -.7713680246 | -1.0182057925 |
| 63 | .7524000000 | -.7668630276 | -1.0684958185 |
| 63 | .7920000000 | -.7511480530 | -1.1016838111 |
| 63 | .8316000000 | -.7231714910 | -1.1136840961 |
| 63 | .8712000000 | -.6815005426 | -1.0994875420 |
| 63 | .9108000000 | -.6234780025 | -1.0515995642 |
| 63 | .9504000000 | -.5421347699 | -0.9541571951 |
| 63 | .9900000000 | -.3983523535 | -0.7303126481 |
******************** CALCULATION COMPLETE *************************
******************* Detection of Resonances ***********************
2 : 1-Resonance in +.1343870049......
2 : 2-Resonance in +.2651460995......
2 : 3-Resonance in +.3888961596......
2 : 4-Resonance in +.5027329013......
******************* DETECTION COMPLETE ***********************
*********************** Calculation of G_-k,2(kappa)| ***************************
--> parameter a=.54 rho=0 m=0
--> 2 : 1 Resonance in .134387
--> kappa in [.084387, .184387]
--> kappa-steps = .05
(4*M is the size of arrays used during Discrete Fourier Transformation)
-----------------------------------------------------------------------------------------
| M | kappa | G_-1,2(kappa)/(a/kappa) | G_0,0(kappa)/(a/kappa) | passage |
| 63 | .0843870049 | +0.0000000000 | -.1377315714 | certain |
| 63 | .1343870049 | +0.0000000000 | -.2080198644 | certain |
| 63 | .1843870049 | +0.0000000000 | -.2739679876 | certain |
******************************* CALCULATION COMPLETE **********************************](https://image.slidesharecdn.com/134355b9-c3ce-41ca-8cf9-85f751f98ea6-160201091932/85/Invariant-Manifolds-Passage-through-Resonance-Stability-and-a-Computer-Assisted-Application-to-a-Synchronous-Motor-188-320.jpg)
![4.5. Numerical Evaluations, Discussion Following Chapter 2 175
*********************** Calculation of G_-k,2(kappa)| ***************************
--> parameter a=.54 rho=0 m=0
--> 2 : 2 Resonance in .265146
--> kappa in [.215146, .315146]
--> kappa-steps = .05
(4*M is the size of arrays used during Discrete Fourier Transformation)
-----------------------------------------------------------------------------------------
| M | kappa | G_-2,2(kappa)/(a/kappa) | G_0,0(kappa)/(a/kappa) | passage |
| 63 | .2151460995 | +.4645644541 | -.3132452504 | mostly |
| 63 | .2651460995 | +.4819943004 | -.3758492763 | mostly |
| 63 | .3151460995 | +.4966052351 | -.4374026487 | mostly |
******************************* CALCULATION COMPLETE **********************************
*********************** Calculation of G_-k,2(kappa)| ***************************
--> parameter a=.54 rho=0 m=0
--> 2 : 3 Resonance in .388896
--> kappa in [.338896, .438896]
--> kappa-steps = .05
(4*M is the size of arrays used during Discrete Fourier Transformation)
-----------------------------------------------------------------------------------------
| M | kappa | G_-3,2(kappa)/(a/kappa) | G_0,0(kappa)/(a/kappa) | passage |
| 63 | .3388961596 | +0.0000000000 | -.4662836238 | certain |
| 63 | .3888961596 | +0.0000000000 | -.5260180190 | certain |
| 63 | .4388961596 | +0.0000000000 | -.5834404315 | certain |
******************************* CALCULATION COMPLETE **********************************
*********************** Calculation of G_-k,2(kappa)| ***************************
--> parameter a=.54 rho=0 m=0
--> 2 : 4 Resonance in .502732
--> kappa in [.452732, .552732]
--> kappa-steps = .05
(4*M is the size of arrays used during Discrete Fourier Transformation)
-----------------------------------------------------------------------------------------
| M | kappa | G_-4,2(kappa)/(a/kappa) | G_0,0(kappa)/(a/kappa) | passage |
| 63 | .4527329013 | +.2001595457 | -.5987298864 | certain |
| 63 | .5027329013 | +.2280917206 | -.6509090303 | certain |
| 63 | .5527329013 | +.2544413511 | -.6966249001 | certain |
******************************* CALCULATION COMPLETE **********************************
As seen in the plot on top of figure 4.20 the drift G0,0(κ) is negative for all values κ ∈ (0, 0.99] evaluated
numerically. Hence away from resonances (i.e. in the outer zone) the solutions of the corresponding
reduced system tend towards h = −∞ i.e. κ → 1 thus towards an ε–independant small neighbourhood
of the upper separatrix.
The alphanumerical output indicates that up to an O(ε)–set (cf. proposition 2.3.11) all solutions pass
through the 2 : 2 resonance arising at κkm ≈ 0.26 as |G0,0(0.26)| < G−2,2(0.26). Hence for at most an
O(ε)–set of solutions a capture in this 2 : 2 resonance is possible. The value κkm ≈ 0.26 corresponds to
P(hm) = a/κkm ≈ 2 (cf. section 4.4.4).
The remaining resonances found are passed by all solutions, as it was discussed in lemma 2.3.4.](https://image.slidesharecdn.com/134355b9-c3ce-41ca-8cf9-85f751f98ea6-160201091932/85/Invariant-Manifolds-Passage-through-Resonance-Stability-and-a-Computer-Assisted-Application-to-a-Synchronous-Motor-189-320.jpg)
![176 Chapter 4. Application to a Miniature Synchronous Motor
central domain :
******************* Calculation of G_0,0(kappa) ***********************
--> parameter a=.54 rho=0 m=0
--> kappa in [0, .99]
--> kappa-steps = .0396
(4*M is the size of arrays used during Discrete Fourier Transformation)
--------------------------------------------------------------------------------
| M | kappa | G_0,0(kappa)/(a*kappa) | G_0,0(kappa)/(a*kappa)^2 |
| 63 | .0396000000 | -.0101616353 | -.4751980619 |
| 63 | .0792000000 | -.0202893535 | -.4744050119 |
| 63 | .1188000000 | -.0303493075 | -.4730843549 |
| 63 | .1584000000 | -.0403077848 | -.4712376638 |
| 63 | .1980000000 | -.0501312599 | -.4688670030 |
| 63 | .2376000000 | -.0597864278 | -.4659747772 |
| 63 | .2772000000 | -.0692402077 | -.4625635173 |
| 63 | .3168000000 | -.0784597068 | -.4586355855 |
| 63 | .3564000000 | -.0874121242 | -.4541927725 |
| 63 | .3960000000 | -.0960645724 | -.4492357485 |
| 63 | .4356000000 | -.1043837815 | -.4437633130 |
| 63 | .4752000000 | -.1123356327 | -.4377713583 |
| 63 | .5148000000 | -.1198844445 | -.4312514191 |
| 63 | .5544000000 | -.1269918882 | -.4241886064 |
| 63 | .5940000000 | -.1336153361 | -.4165585988 |
| 63 | .6336000000 | -.1397053106 | -.4083231349 |
| 63 | .6732000000 | -.1452014534 | -.3994230249 |
| 63 | .7128000000 | -.1500259297 | -.3897668292 |
| 63 | .7524000000 | -.1540721083 | -.3792114821 |
| 63 | .7920000000 | -.1571838147 | -.3675266900 |
| 63 | .8316000000 | -.1591137393 | -.3543230793 |
| 63 | .8712000000 | -.1594287613 | -.3388871062 |
| 63 | .9108000000 | -.1572490262 | -.3197210150 |
| 63 | .9504000000 | -.1502475728 | -.2927569928 |
| 63 | .9900000000 | -.1254297127 | -.2346234806 |
******************** CALCULATION COMPLETE *************************
******************* Detection of Resonances ***********************
2 : 8-Resonance in +.5191173717......
2 : 9-Resonance in +.7483112555......
2 : 10-Resonance in +.8538470933......
******************* DETECTION COMPLETE ***********************
******************* Calculation of G_-k,2(kappa)| ***********************
--> parameter a=.54 rho=0 m=0
--> 2 : 8 Resonance in .519117
--> kappa in [.469117, .569117]
--> kappa-steps = .05
(4*M is the size of arrays used during Discrete Fourier Transformation)
-----------------------------------------------------------------------------------------
| M | kappa | G_-8,2(kappa)/(a*kappa) | G_0,0(kappa)/(a*kappa) | passage |
| 63 | .4691173717 | +.0000757834 | -.1111394979 | certain |
| 63 | .5191173717 | +.0001628013 | -.1206814887 | certain |
| 63 | .5691173717 | +.0003304881 | -.1295124702 | certain |
******************** CALCULATION COMPLETE *************************](https://image.slidesharecdn.com/134355b9-c3ce-41ca-8cf9-85f751f98ea6-160201091932/85/Invariant-Manifolds-Passage-through-Resonance-Stability-and-a-Computer-Assisted-Application-to-a-Synchronous-Motor-190-320.jpg)
![4.5. Numerical Evaluations, Discussion Following Chapter 2 177
******************* Calculation of G_-k,2(kappa)| ***********************
--> parameter a=.54 rho=0 m=0
--> 2 : 9 Resonance in .748311
--> kappa in [.698311, .798311]
--> kappa-steps = .05
(4*M is the size of arrays used during Discrete Fourier Transformation)
-----------------------------------------------------------------------------------------
| M | kappa | G_-9,2(kappa)/(a*kappa) | G_0,0(kappa)/(a*kappa) | passage |
| 63 | .6983112555 | +.0005194597 | -.1483446195 | certain |
| 63 | .7483112555 | +.0010457119 | -.1536943953 | certain |
| 63 | .7983112555 | +.0020912121 | -.1575788339 | certain |
******************** CALCULATION COMPLETE *************************
******************* Calculation of G_-k,2(kappa)| ***********************
--> parameter a=.54 rho=0 m=0
--> 2 : 10 Resonance in .853847
--> kappa in [.803847, .903847]
--> kappa-steps = .05
(4*M is the size of arrays used during Discrete Fourier Transformation)
-----------------------------------------------------------------------------------------
| M | kappa | G_-10,2(kappa)/(a*kappa) | G_0,0(kappa)/(a*kappa) | passage |
| 63 | .8038470933 | +.0008016925 | -.1578998734 | certain |
| 63 | .8538470933 | +.0018221840 | -.1595301896 | certain |
| 63 | .9038470933 | +.0043835408 | -.1578798979 | certain |
******************** CALCULATION COMPLETE *************************
As the drift G0,0(κ) is negative for all values κ ∈ (0, 0.99], ˙h in the averaged reduced system is negative
(for h > 0). Hence the solutions tend towards the invariant set κ = 0, h = 0, respectively i.e. the periodic
solution at the origin. The solutions may not be captured in the resonances arising. Together with the
results found in section 4.6 to follow, we will see that the periodic solution h = 0 is globally attractive
and stable in the entire central domain. From the last column showing
G0,0(κ)
(κ a)2 we estimate g2,1
0,0 ≈ −0.47
which coincides with the value presented in figure 4.36.](https://image.slidesharecdn.com/134355b9-c3ce-41ca-8cf9-85f751f98ea6-160201091932/85/Invariant-Manifolds-Passage-through-Resonance-Stability-and-a-Computer-Assisted-Application-to-a-Synchronous-Motor-191-320.jpg)
![178 Chapter 4. Application to a Miniature Synchronous Motor
lower domain :
************************** Calculation of G_0,0(kappa) ***************************
--> parameter a=.54 rho=0 m=0
--> kappa in [0, .99]
--> kappa-steps = .0396
(4*M is the size of arrays used during Discrete Fourier Transformation)
----------------------------------------------------------------------------------
| M | kappa | G_0,0(kappa)/(-a/kappa) | G_0,0(kappa)/(-a/kappa)^2 |
| 63 | .0396000000 | +.0796445290 | -.0058405987 |
| 63 | .0792000000 | +.1774760156 | -.0260298156 |
| 63 | .1188000000 | +.3105204651 | -.0683145023 |
| 63 | .1584000000 | +.5257107500 | -.1542084866 |
| 63 | .1980000000 | +.8767114389 | -.3214608609 |
| 63 | .2376000000 | +.7773337592 | -.3420268540 |
| 63 | .2772000000 | +.4115375150 | -.2112559244 |
| 63 | .3168000000 | +.2727148538 | -.1599927142 |
| 63 | .3564000000 | +.1994313322 | -.1316246793 |
| 63 | .3960000000 | +.1390129921 | -.1019428609 |
| 63 | .4356000000 | +.0832007341 | -.0671152589 |
| 63 | .4752000000 | +.0325510962 | -.0286449646 |
| 63 | .5148000000 | -.0113934889 | +.0108617928 |
| 63 | .5544000000 | -.0481280794 | +.0494114948 |
| 63 | .5940000000 | -.0781084755 | +.0859193230 |
| 63 | .6336000000 | -.1021867688 | +.1198991421 |
| 63 | .6732000000 | -.1212749731 | +.1511894665 |
| 63 | .7128000000 | -.1361830077 | +.1797615702 |
| 63 | .7524000000 | -.1475541227 | +.2055920776 |
| 63 | .7920000000 | -.1558358983 | +.2285593176 |
| 63 | .8316000000 | -.1612471207 | +.2483205659 |
| 63 | .8712000000 | -.1636952556 | +.2640950124 |
| 63 | .9108000000 | -.1625202959 | +.2741175659 |
| 63 | .9504000000 | -.1554663079 | +.2736207019 |
| 63 | .9900000000 | -.1291750079 | +.2368208479 |
******************** CALCULATION COMPLETE *************************
******************* Detection of Resonances ***********************
2 : 1-Resonance in +.1343870049......
2 : 2-Resonance in +.2651460995......
2 : 3-Resonance in +.3888961596......
2 : 4-Resonance in +.5027329013......
******************* DETECTION COMPLETE ***********************
******************* Calculation of G_-k,2(kappa)| ***********************
--> parameter a=.54 rho=0 m=0
--> 2 : 1 Resonance in .134387
--> kappa in [.084387, .184387]
--> kappa-steps = .05
(4*M is the size of arrays used during Discrete Fourier Transformation)
-------------------------------------------------------------------------------------------
| M | kappa | G_-1,2(kappa)/(-a/kappa) | G_0,0(kappa)/(-a/kappa) | passage |
| 63 | .0843870049 | +0.0000000000 | +.1923262653 | certain |
| 63 | .1343870049 | +0.0000000000 | +.3810181802 | certain |
| 63 | .1843870049 | +0.0000000000 | +.7503725033 | certain |
******************** CALCULATION COMPLETE *************************](https://image.slidesharecdn.com/134355b9-c3ce-41ca-8cf9-85f751f98ea6-160201091932/85/Invariant-Manifolds-Passage-through-Resonance-Stability-and-a-Computer-Assisted-Application-to-a-Synchronous-Motor-192-320.jpg)
![4.5. Numerical Evaluations, Discussion Following Chapter 2 179
******************* Calculation of G_-k,2(kappa)| ***********************
--> parameter a=.54 rho=0 m=0
--> 2 : 2 Resonance in .265146
--> kappa in [.215146, .315146]
--> kappa-steps = .05
(4*M is the size of arrays used during Discrete Fourier Transformation)
-------------------------------------------------------------------------------------------
| M | kappa | G_-2,2(kappa)/(-a/kappa) | G_0,0(kappa)/(-a/kappa) | passage |
| 63 | .2151460995 | -.0318656728 | +.9486125303 | certain |
| 63 | .2651460995 | -.0348682456 | +.4909921780 | certain |
| 63 | .3151460995 | -.0384116075 | +.2765091762 | certain |
******************** CALCULATION COMPLETE *************************
******************* Calculation of G_-k,2(kappa)| ***********************
--> parameter a=.54 rho=0 m=0
--> 2 : 3 Resonance in .388896
--> kappa in [.338896, .438896]
--> kappa-steps = .05
(4*M is the size of arrays used during Discrete Fourier Transformation)
-------------------------------------------------------------------------------------------
| M | kappa | G_-3,2(kappa)/(-a/kappa) | G_0,0(kappa)/(-a/kappa) | passage |
| 63 | .3388961596 | +0.0000000000 | +.2289045592 | certain |
| 63 | .3888961596 | +0.0000000000 | +.1494734630 | certain |
| 63 | .4388961596 | +0.0000000000 | +.0787643246 | certain |
******************** CALCULATION COMPLETE *************************
******************* Calculation of G_-k,2(kappa)| ***********************
--> parameter a=.54 rho=0 m=0
--> 2 : 4 Resonance in .502732
--> kappa in [.452732, .552732]
--> kappa-steps = .05
(4*M is the size of arrays used during Discrete Fourier Transformation)
-------------------------------------------------------------------------------------------
| M | kappa | G_-4,2(kappa)/(-a/kappa) | G_0,0(kappa)/(-a/kappa) | passage |
| 63 | .4527329013 | -.0017777368 | +.0605512470 | certain |
| 63 | .5027329013 | -.0023731029 | +.0012323718 | mostly |
| 63 | .5527329013 | -.0031129066 | -.0467229812 | certain |
******************** CALCULATION COMPLETE *************************
For κ ∈ (0, ≈ 0.5) the drift G0,0(κ)/(−a/κ) and thus ˙h is positive,
P
P=-1
Q
Figure 4.21: a = 0.54, ̺ = 0,
m = 0
while κ ∈ (≈ 0.5, 0.99) implies ˙h < 0. Thus the solutions in the
lower domain tend towards the set κ ≈ 0.5 which is equivalent to
P ≈ −a/κ ≈ −1. This attractive set contains solutions of the form
ϑ(τ(t)) ≈ ε α(t, ε) (cf. the formula found in section 4.4.4) which may
change the sign. From a physical point of view this corresponds to an
oscillation of the rotor. The 2 : 4 resonance detected in κkm ≈ 0.502
is very close to the zero of the function G0,0. As this zero and the
resonance are possibly identical, the results of section 2.3 might not
be applicable here.
For a discussion of the separatrix region (i.e. the white region in fig-
ure 4.21) we refer the reader to section 4.7.](https://image.slidesharecdn.com/134355b9-c3ce-41ca-8cf9-85f751f98ea6-160201091932/85/Invariant-Manifolds-Passage-through-Resonance-Stability-and-a-Computer-Assisted-Application-to-a-Synchronous-Motor-193-320.jpg)

![4.5. Numerical Evaluations, Discussion Following Chapter 2 181
upper domain :
*********************** Calculation of G_0,0(kappa) ***************************
--> parameter a=.54 rho=1 m=0
--> kappa in [0, .99]
--> kappa-steps = .0396
(4*M is the size of arrays used during Discrete Fourier Transformation)
--------------------------------------------------------------------------------
| M | kappa | G_0,0(kappa)/(a/kappa) | G_0,0(kappa)/(a/kappa)^2 |
| 63 | .0396000000 | -14.1941182078 | -1.0409020019 |
| 63 | .0792000000 | -7.4260782072 | -1.0891581370 |
| 63 | .1188000000 | -5.1982391236 | -1.1436126072 |
| 63 | .1584000000 | -4.1031203872 | -1.2035819802 |
| 63 | .1980000000 | -3.4600266337 | -1.2686764323 |
| 63 | .2376000000 | -3.0424373556 | -1.3386724364 |
| 63 | .2772000000 | -2.7533895421 | -1.4134066316 |
| 63 | .3168000000 | -2.5443388122 | -1.4926787698 |
| 63 | .3564000000 | -2.3881189587 | -1.5761585127 |
| 63 | .3960000000 | -2.2681294223 | -1.6632949097 |
| 63 | .4356000000 | -2.1734264733 | -1.7532306884 |
| 63 | .4752000000 | -2.0962798153 | -1.8447262375 |
| 63 | .5148000000 | -2.0308740516 | -1.9360999292 |
| 63 | .5544000000 | -1.9725890858 | -2.0251914614 |
| 63 | .5940000000 | -1.9175930801 | -2.1093523881 |
| 63 | .6336000000 | -1.8626099345 | -2.1854623231 |
| 63 | .6732000000 | -1.8047808130 | -2.2499600802 |
| 63 | .7128000000 | -1.7415649398 | -2.2988657206 |
| 63 | .7524000000 | -1.6706337731 | -2.3277497239 |
| 63 | .7920000000 | -1.5897068156 | -2.3315699962 |
| 63 | .8316000000 | -1.4962428055 | -2.3042139205 |
| 63 | .8712000000 | -1.3867758994 | -2.2373317843 |
| 63 | .9108000000 | -1.2551877767 | -2.1170833834 |
| 63 | .9504000000 | -1.0863723838 | -1.9120153956 |
| 63 | .9900000000 | -.7994679938 | -1.4656913221 |
******************** CALCULATION COMPLETE *************************
******************* Detection of Resonances ***********************
2 : 1-Resonance in +.1343870049......
2 : 2-Resonance in +.2651460995......
2 : 3-Resonance in +.3888961596......
2 : 4-Resonance in +.5027329013......
******************* DETECTION COMPLETE ***********************
*********************** Calculation of G_-k,2(kappa)| ***************************
--> parameter a=.54 rho=1 m=0
--> 2 : 1 Resonance in .134387
--> kappa in [.084387, .184387]
--> kappa-steps = .05
(4*M is the size of arrays used during Discrete Fourier Transformation)
-----------------------------------------------------------------------------------------
| M | kappa | G_-1,2(kappa)/(a/kappa) | G_0,0(kappa)/(a/kappa) | passage |
| 63 | .0843870049 | +0.0000000000 | -7.0131241237 | certain |
| 63 | .1343870049 | +0.0000000000 | -4.6876280257 | certain |
| 63 | .1843870049 | +0.0000000000 | -3.6482952790 | certain |
******************************* CALCULATION COMPLETE **********************************](https://image.slidesharecdn.com/134355b9-c3ce-41ca-8cf9-85f751f98ea6-160201091932/85/Invariant-Manifolds-Passage-through-Resonance-Stability-and-a-Computer-Assisted-Application-to-a-Synchronous-Motor-195-320.jpg)
![182 Chapter 4. Application to a Miniature Synchronous Motor
*********************** Calculation of G_-k,2(kappa)| ***************************
--> parameter a=.54 rho=1 m=0
--> 2 : 2 Resonance in .265146
--> kappa in [.215146, .315146]
--> kappa-steps = .05
(4*M is the size of arrays used during Discrete Fourier Transformation)
-----------------------------------------------------------------------------------------
| M | kappa | G_-2,2(kappa)/(a/kappa) | G_0,0(kappa)/(a/kappa) | passage |
| 63 | .2151460995 | +.4645644541 | -3.2588621405 | certain |
| 63 | .2651460995 | +.4819943004 | -2.8312318725 | certain |
| 63 | .3151460995 | +.4966052351 | -2.5518692869 | certain |
******************************* CALCULATION COMPLETE **********************************
*********************** Calculation of G_-k,2(kappa)| ***************************
--> parameter a=.54 rho=1 m=0
--> 2 : 3 Resonance in .388896
--> kappa in [.338896, .438896]
--> kappa-steps = .05
(4*M is the size of arrays used during Discrete Fourier Transformation)
-----------------------------------------------------------------------------------------
| M | kappa | G_-3,2(kappa)/(a/kappa) | G_0,0(kappa)/(a/kappa) | passage |
| 63 | .3388961596 | +0.0000000000 | -2.4518881209 | certain |
| 63 | .3888961596 | +0.0000000000 | -2.2875287270 | certain |
| 63 | .4388961596 | +0.0000000000 | -2.1664254389 | certain |
******************************* CALCULATION COMPLETE **********************************
*********************** Calculation of G_-k,2(kappa)| ***************************
--> parameter a=.54 rho=1 m=0
--> 2 : 4 Resonance in .502732
--> kappa in [.452732, .552732]
--> kappa-steps = .05
(4*M is the size of arrays used during Discrete Fourier Transformation)
-----------------------------------------------------------------------------------------
| M | kappa | G_-4,2(kappa)/(a/kappa) | G_0,0(kappa)/(a/kappa) | passage |
| 63 | .4527329013 | +.2001595457 | -2.1382691569 | certain |
| 63 | .5027329013 | +.2280917206 | -2.0498557721 | certain |
| 63 | .5527329013 | +.2544413511 | -1.9749517859 | certain |
******************************* CALCULATION COMPLETE **********************************
central domain :
******************* Calculation of G_0,0(kappa) ***********************
--> parameter a=.54 rho=1 m=0
--> kappa in [0, .99]
--> kappa-steps = .0396
(4*M is the size of arrays used during Discrete Fourier Transformation)
--------------------------------------------------------------------------------
| M | kappa | G_0,0(kappa)/(a*kappa) | G_0,0(kappa)/(a*kappa)^2 |
| 63 | .0396000000 | -.0208515378 | -.9750999750 |
| 63 | .0792000000 | -.0416565339 | -.9740117374 |
| 63 | .1188000000 | -.0623683167 | -.9721959833 |
| 63 | .1584000000 | -.0829399403 | -.9696495088 |
| 63 | .1980000000 | -.1033240111 | -.9663674819 |
| 63 | .2376000000 | -.1234724649 | -.9623430677 |
| 63 | .2772000000 | -.1433362740 | -.9575668995 |
| 63 | .3168000000 | -.1628650526 | -.9520263552 |
| 63 | .3564000000 | -.1820065203 | -.9457045784 |
| 63 | .3960000000 | -.2007057664 | -.9385791548 |
| 63 | .4356000000 | -.2189042325 | -.9306203130 |
| 63 | .4752000000 | -.2365382917 | -.9217884546 |
| 63 | .5148000000 | -.2535372413 | -.9120307106 |
| 63 | .5544000000 | -.2698204188 | -.9012760503 |
| 63 | .5940000000 | -.2852929789 | -.8894281672 |](https://image.slidesharecdn.com/134355b9-c3ce-41ca-8cf9-85f751f98ea6-160201091932/85/Invariant-Manifolds-Passage-through-Resonance-Stability-and-a-Computer-Assisted-Application-to-a-Synchronous-Motor-196-320.jpg)
![4.5. Numerical Evaluations, Discussion Following Chapter 2 183
| 63 | .6336000000 | -.2998395469 | -.8763548299 |
| 63 | .6732000000 | -.3133143740 | -.8618713662 |
| 63 | .7128000000 | -.3255254323 | -.8457139094 |
| 63 | .7524000000 | -.3362073506 | -.8274936269 |
| 63 | .7920000000 | -.3449721435 | -.8066127562 |
| 63 | .8316000000 | -.3512110287 | -.7820957118 |
| 63 | .8712000000 | -.3538724650 | -.7522031447 |
| 63 | .9108000000 | -.3508556121 | -.7133647507 |
| 63 | .9504000000 | -.3367092493 | -.6560770695 |
| 63 | .9900000000 | -.2817046189 | -.5269446670 |
******************** CALCULATION COMPLETE *************************
******************* Detection of Resonances ***********************
2 : 8-Resonance in +.5191173717......
2 : 9-Resonance in +.7483112555......
2 : 10-Resonance in +.8538470933......
******************* DETECTION COMPLETE ***********************
******************* Calculation of G_-k,2(kappa)| ***********************
--> parameter a=.54 rho=1 m=0
--> 2 : 8 Resonance in .519117
--> kappa in [.469117, .569117]
--> kappa-steps = .05
(4*M is the size of arrays used during Discrete Fourier Transformation)
-----------------------------------------------------------------------------------------
| M | kappa | G_-8,2(kappa)/(a*kappa) | G_0,0(kappa)/(a*kappa) | passage |
| 63 | .4691173717 | +.0000757834 | -.2338690892 | certain |
| 63 | .5191173717 | +.0001628013 | -.2553488358 | certain |
| 63 | .5691173717 | +.0003304881 | -.2756710900 | certain |
******************** CALCULATION COMPLETE *************************
******************* Calculation of G_-k,2(kappa)| ***********************
--> parameter a=.54 rho=1 m=0
--> 2 : 9 Resonance in .748311
--> kappa in [.698311, .798311]
--> kappa-steps = .05
(4*M is the size of arrays used during Discrete Fourier Transformation)
-----------------------------------------------------------------------------------------
| M | kappa | G_-9,2(kappa)/(a*kappa) | G_0,0(kappa)/(a*kappa) | passage |
| 63 | .6983112555 | +.0005194597 | -.3212190507 | certain |
| 63 | .7483112555 | +.0010457119 | -.3351852498 | certain |
| 63 | .7983112555 | +.0020912121 | -.3461559201 | certain |
******************** CALCULATION COMPLETE *************************
******************* Calculation of G_-k,2(kappa)| ***********************
--> parameter a=.54 rho=1 m=0
--> 2 : 10 Resonance in .853847
--> kappa in [.803847, .903847]
--> kappa-steps = .05
(4*M is the size of arrays used during Discrete Fourier Transformation)
-----------------------------------------------------------------------------------------
| M | kappa | G_-10,2(kappa)/(a*kappa) | G_0,0(kappa)/(a*kappa) | passage |
| 63 | .8038470933 | +.0008016925 | -.3471396203 | certain |
| 63 | .8538470933 | +.0018221840 | -.3532445112 | certain |
| 63 | .9038470933 | +.0043835408 | -.3519559769 | certain |
******************** CALCULATION COMPLETE *************************](https://image.slidesharecdn.com/134355b9-c3ce-41ca-8cf9-85f751f98ea6-160201091932/85/Invariant-Manifolds-Passage-through-Resonance-Stability-and-a-Computer-Assisted-Application-to-a-Synchronous-Motor-197-320.jpg)
![184 Chapter 4. Application to a Miniature Synchronous Motor
lower domain :
************************** Calculation of G_0,0(kappa) ***************************
--> parameter a=.54 rho=1 m=0
--> kappa in [0, .99]
--> kappa-steps = .0396
(4*M is the size of arrays used during Discrete Fourier Transformation)
----------------------------------------------------------------------------------
| M | kappa | G_0,0(kappa)/(-a/kappa) | G_0,0(kappa)/(-a/kappa)^2 |
| 63 | .0396000000 | +13.2055101840 | -.9684040801 |
| 63 | .0792000000 | +6.4750426365 | -.9496729200 |
| 63 | .1188000000 | +4.3256140415 | -.9516350891 |
| 63 | .1584000000 | +3.3950590710 | -.9958839941 |
| 63 | .1980000000 | +3.0552187840 | -1.1202468874 |
| 63 | .2376000000 | +2.4926282995 | -1.0967564518 |
| 63 | .2772000000 | +1.7938434247 | -.9208396246 |
| 63 | .3168000000 | +1.4035556813 | -.8234193330 |
| 63 | .3564000000 | +1.1332772528 | -.7479629868 |
| 63 | .3960000000 | +.9141057892 | -.6703442454 |
| 63 | .4356000000 | +.7274598044 | -.5868175756 |
| 63 | .4752000000 | +.5670202826 | -.4989778487 |
| 63 | .5148000000 | +.4295771905 | -.4095302549 |
| 63 | .5544000000 | +.3122502478 | -.3205769211 |
| 63 | .5940000000 | +.2121129891 | -.2333242880 |
| 63 | .6336000000 | +.1264754786 | -.1483978949 |
| 63 | .6732000000 | +.0530401909 | -.0661234380 |
| 63 | .7128000000 | -.0100534027 | +.0132704915 |
| 63 | .7524000000 | -.0642396849 | +.0895072943 |
| 63 | .7920000000 | -.1105416397 | +.1621277382 |
| 63 | .8316000000 | -.1495505577 | +.2303078588 |
| 63 | .8712000000 | -.1813097835 | +.2925131175 |
| 63 | .9108000000 | -.2049101475 | +.3456151155 |
| 63 | .9504000000 | -.2168489325 | +.3816541212 |
| 63 | .9900000000 | -.1960317450 | +.3593915325 |
******************** CALCULATION COMPLETE *************************
******************* Detection of Resonances ***********************
2 : 1-Resonance in +.1343870049......
2 : 2-Resonance in +.2651460995......
2 : 3-Resonance in +.3888961596......
2 : 4-Resonance in +.5027329013......
******************* DETECTION COMPLETE ***********************
******************* Calculation of G_-k,2(kappa)| ***********************
--> parameter a=.54 rho=1 m=0
--> 2 : 1 Resonance in .134387
--> kappa in [.084387, .184387]
--> kappa-steps = .05
(4*M is the size of arrays used during Discrete Fourier Transformation)
-------------------------------------------------------------------------------------------
| M | kappa | G_-1,2(kappa)/(-a/kappa) | G_0,0(kappa)/(-a/kappa) | passage |
| 63 | .0843870049 | +0.0000000000 | +6.0695030868 | certain |
| 63 | .1343870049 | +0.0000000000 | +3.8651670456 | certain |
| 63 | .1843870049 | +0.0000000000 | +3.1332914693 | certain |
******************** CALCULATION COMPLETE *************************](https://image.slidesharecdn.com/134355b9-c3ce-41ca-8cf9-85f751f98ea6-160201091932/85/Invariant-Manifolds-Passage-through-Resonance-Stability-and-a-Computer-Assisted-Application-to-a-Synchronous-Motor-198-320.jpg)
![4.5. Numerical Evaluations, Discussion Following Chapter 2 185
******************* Calculation of G_-k,2(kappa)| ***********************
--> parameter a=.54 rho=1 m=0
--> 2 : 2 Resonance in .265146
--> kappa in [.215146, .315146]
--> kappa-steps = .05
(4*M is the size of arrays used during Discrete Fourier Transformation)
-------------------------------------------------------------------------------------------
| M | kappa | G_-2,2(kappa)/(-a/kappa) | G_0,0(kappa)/(-a/kappa) | passage |
| 63 | .2151460995 | -.0318656728 | +2.9059731667 | certain |
| 63 | .2651460995 | -.0348682456 | +1.9643521831 | certain |
| 63 | .3151460995 | -.0384116075 | +1.4166207960 | certain |
******************** CALCULATION COMPLETE *************************
******************* Calculation of G_-k,2(kappa)| ***********************
--> parameter a=.54 rho=1 m=0
--> 2 : 3 Resonance in .388896
--> kappa in [.338896, .438896]
--> kappa-steps = .05
(4*M is the size of arrays used during Discrete Fourier Transformation)
---------------------------------------------------------------------------------_----------
| M | kappa | G_-3,2(kappa)/(-a/kappa) | G_0,0(kappa)/(-a/kappa) | passage |
| 63 | .3388961596 | +0.0000000000 | +1.2443227670 | certain |
| 63 | .3888961596 | +0.0000000000 | +.9507467398 | certain |
| 63 | .4388961596 | +0.0000000000 | +.7131588392 | certain |
******************** CALCULATION COMPLETE *************************
******************* Calculation of G_-k,2(kappa)| ***********************
--> parameter a=.54 rho=1 m=0
--> 2 : 4 Resonance in .502732
--> kappa in [.452732, .552732]
--> kappa-steps = .05
(4*M is the size of arrays used during Discrete Fourier Transformation)
-------------------------------------------------------------------------------------------
| M | kappa | G_-4,2(kappa)/(-a/kappa) | G_0,0(kappa)/(-a/kappa) | passage |
| 63 | .4527329013 | -.0017777368 | +.6550440373 | certain |
| 63 | .5027329013 | -.0023731029 | +.4691922593 | certain |
| 63 | .5527329013 | -.0031129066 | +.3168229222 | certain |
******************** CALCULATION COMPLETE *************************
The qualitative behaviour is very similar to the preceeding situation
P
P=-1
Q
Figure 4.23: a = 0.54, ̺ = 1,
m = 0
of section 4.5.1. Due to ̺ = 1 the drift remote from the separatrices,
in the upper and lower domain becomes much larger than for ̺ = 0.
As for the same reason capture in resonances (and in particular in the
2 : 2 resonance at κkm ≈ 0.26 for the upper domain) does not appear.
The attractive set in the lower domain moves to P ≈ −0.78. The
physical interpretation then is different. As ϑ(τ(t)) is of the form
0.22 t+ε α(t, ε), the rotor does not oscillate but rotate here. However,
the mean angular speed of the rotor varies around 0.22 ω (with respect
to time τ) compared to the much larger angular speed ω of the periodic
solution h = 0 (or, equivalently (Q, P) = (0, 0)). Hence for solutions
attracted in P ≈ −0.78 the synchronous motor rotates but with a
slow speed that periodically increases and decreases.](https://image.slidesharecdn.com/134355b9-c3ce-41ca-8cf9-85f751f98ea6-160201091932/85/Invariant-Manifolds-Passage-through-Resonance-Stability-and-a-Computer-Assisted-Application-to-a-Synchronous-Motor-199-320.jpg)

![4.5. Numerical Evaluations, Discussion Following Chapter 2 187
upper domain :
*********************** Calculation of G_0,0(kappa) ***************************
--> parameter a=.54 rho=0 m=1
--> kappa in [0, .99]
--> kappa-steps = .0396
(4*M is the size of arrays used during Discrete Fourier Transformation)
--------------------------------------------------------------------------------
| M | kappa | G_0,0(kappa)/(a/kappa) | G_0,0(kappa)/(a/kappa)^2 |
| 63 | .0396000000 | -.5684486690 | -.0416862357 |
| 63 | .0792000000 | -.6292972086 | -.0922969239 |
| 63 | .1188000000 | -.6849175690 | -.1506818651 |
| 63 | .1584000000 | -.7369333226 | -.2161671079 |
| 63 | .1980000000 | -.7864811552 | -.2883764235 |
| 63 | .2376000000 | -.8343280457 | -.3671043401 |
| 63 | .2772000000 | -.8809295277 | -.4522104909 |
| 63 | .3168000000 | -.9264600119 | -.5435232070 |
| 63 | .3564000000 | -.9708290474 | -.6407471713 |
| 63 | .3960000000 | -1.0136918647 | -.7433740341 |
| 63 | .4356000000 | -1.0544606008 | -.8505982180 |
| 63 | .4752000000 | -1.0923215199 | -.9612429375 |
| 63 | .5148000000 | -1.1262622058 | -1.0737033029 |
| 63 | .5544000000 | -1.1551105812 | -1.1859135300 |
| 63 | .5940000000 | -1.1775845283 | -1.2953429811 |
| 63 | .6336000000 | -1.1923469710 | -1.3990204459 |
| 63 | .6732000000 | -1.1980568549 | -1.4935775458 |
| 63 | .7128000000 | -1.1934016797 | -1.5752902172 |
| 63 | .7524000000 | -1.1770911815 | -1.6400803796 |
| 63 | .7920000000 | -1.1477803050 | -1.6834111140 |
| 63 | .8316000000 | -1.1038588667 | -1.6999426548 |
| 63 | .8712000000 | -1.0429454849 | -1.6826187157 |
| 63 | .9108000000 | -.9605278154 | -1.6200902486 |
| 63 | .9504000000 | -.8449448892 | -1.4871030049 |
| 63 | .9900000000 | -.6323385422 | -1.1592873274 |
******************** CALCULATION COMPLETE *************************
******************* Detection of Resonances ***********************
2 : 1-Resonance in +.1343870049......
2 : 2-Resonance in +.2651460995......
2 : 3-Resonance in +.3888961596......
2 : 4-Resonance in +.5027329013......
******************* DETECTION COMPLETE ***********************
*********************** Calculation of G_-k,2(kappa)| ***************************
--> parameter a=.54 rho=0 m=1
--> 2 : 1 Resonance in .134387
--> kappa in [.084387, .184387]
--> kappa-steps = .05
(4*M is the size of arrays used during Discrete Fourier Transformation)
-----------------------------------------------------------------------------------------
| M | kappa | G_-1,2(kappa)/(a/kappa) | G_0,0(kappa)/(a/kappa) | passage |
| 63 | .0843870049 | +0.0000000000 | -.6368394368 | certain |
| 63 | .1343870049 | +0.0000000000 | -.7057495124 | certain |
| 63 | .1843870049 | +0.0000000000 | -.7696721503 | certain |
******************************* CALCULATION COMPLETE **********************************](https://image.slidesharecdn.com/134355b9-c3ce-41ca-8cf9-85f751f98ea6-160201091932/85/Invariant-Manifolds-Passage-through-Resonance-Stability-and-a-Computer-Assisted-Application-to-a-Synchronous-Motor-201-320.jpg)
![188 Chapter 4. Application to a Miniature Synchronous Motor
*********************** Calculation of G_-k,2(kappa)| ***************************
--> parameter a=.54 rho=0 m=1
--> 2 : 2 Resonance in .265146
--> kappa in [.215146, .315146]
--> kappa-steps = .05
(4*M is the size of arrays used during Discrete Fourier Transformation)
-----------------------------------------------------------------------------------------
| M | kappa | G_-2,2(kappa)/(a/kappa) | G_0,0(kappa)/(a/kappa) | passage |
| 63 | .2151460995 | +.4645644541 | -.8073733772 | certain |
| 63 | .2651460995 | +.4819943004 | -.8668605718 | certain |
| 63 | .3151460995 | +.4966052351 | -.9245801579 | certain |
******************************* CALCULATION COMPLETE **********************************
*********************** Calculation of G_-k,2(kappa)| ***************************
--> parameter a=.54 rho=0 m=1
--> 2 : 3 Resonance in .388896
--> kappa in [.338896, .438896]
--> kappa-steps = .05
(4*M is the size of arrays used during Discrete Fourier Transformation)
-----------------------------------------------------------------------------------------
| M | kappa | G_-3,2(kappa)/(a/kappa) | G_0,0(kappa)/(a/kappa) | passage |
| 63 | .3388961596 | +0.0000000000 | -.9513767685 | certain |
| 63 | .3888961596 | +0.0000000000 | -1.0061367346 | certain |
| 63 | .4388961596 | +0.0000000000 | -1.0577356779 | certain |
******************************* CALCULATION COMPLETE **********************************
*********************** Calculation of G_-k,2(kappa)| ***************************
--> parameter a=.54 rho=0 m=1
--> 2 : 4 Resonance in .502732
--> kappa in [.452732, .552732]
--> kappa-steps = .05
(4*M is the size of arrays used during Discrete Fourier Transformation)
-----------------------------------------------------------------------------------------
| M | kappa | G_-4,2(kappa)/(a/kappa) | G_0,0(kappa)/(a/kappa) | passage |
| 63 | .4527329013 | +.2001595457 | -1.0712531265 | certain |
| 63 | .5027329013 | +.2280917206 | -1.1164024575 | certain |
| 63 | .5527329013 | +.2544413511 | -1.1540153912 | certain |
******************************* CALCULATION COMPLETE **********************************
central domain :
******************* Calculation of G_0,0(kappa) ***********************
--> parameter a=.54 rho=0 m=1
--> kappa in [0, .99]
--> kappa-steps = .0396
(4*M is the size of arrays used during Discrete Fourier Transformation)
--------------------------------------------------------------------------------
| M | kappa | G_0,0(kappa)/(a*kappa) | G_0,0(kappa)/(a*kappa)^2 |
| 63 | .0396000000 | -.0101616353 | -.4751980619 |
| 63 | .0792000000 | -.0202893535 | -.4744050119 |
| 63 | .1188000000 | -.0303493075 | -.4730843549 |
| 63 | .1584000000 | -.0403077848 | -.4712376638 |
| 63 | .1980000000 | -.0501312599 | -.4688670030 |
| 63 | .2376000000 | -.0597864278 | -.4659747772 |
| 63 | .2772000000 | -.0692402077 | -.4625635173 |
| 63 | .3168000000 | -.0784597068 | -.4586355855 |
| 63 | .3564000000 | -.0874121242 | -.4541927725 |
| 63 | .3960000000 | -.0960645724 | -.4492357485 |
| 63 | .4356000000 | -.1043837815 | -.4437633130 |
| 63 | .4752000000 | -.1123356327 | -.4377713583 |
| 63 | .5148000000 | -.1198844445 | -.4312514191 |
| 63 | .5544000000 | -.1269918882 | -.4241886064 |
| 63 | .5940000000 | -.1336153361 | -.4165585988 |](https://image.slidesharecdn.com/134355b9-c3ce-41ca-8cf9-85f751f98ea6-160201091932/85/Invariant-Manifolds-Passage-through-Resonance-Stability-and-a-Computer-Assisted-Application-to-a-Synchronous-Motor-202-320.jpg)
![4.5. Numerical Evaluations, Discussion Following Chapter 2 189
| 63 | .6336000000 | -.1397053106 | -.4083231349 |
| 63 | .6732000000 | -.1452014534 | -.3994230249 |
| 63 | .7128000000 | -.1500259297 | -.3897668292 |
| 63 | .7524000000 | -.1540721083 | -.3792114821 |
| 63 | .7920000000 | -.1571838147 | -.3675266900 |
| 63 | .8316000000 | -.1591137393 | -.3543230793 |
| 63 | .8712000000 | -.1594287613 | -.3388871062 |
| 63 | .9108000000 | -.1572490262 | -.3197210150 |
| 63 | .9504000000 | -.1502475728 | -.2927569928 |
| 63 | .9900000000 | -.1254297127 | -.2346234806 |
******************** CALCULATION COMPLETE *************************
******************* Detection of Resonances ***********************
2 : 8-Resonance in +.5191173717......
2 : 9-Resonance in +.7483112555......
2 : 10-Resonance in +.8538470933......
******************* DETECTION COMPLETE ***********************
******************* Calculation of G_-k,2(kappa)| ***********************
--> parameter a=.54 rho=0 m=1
--> 2 : 8 Resonance in .519117
--> kappa in [.469117, .569117]
--> kappa-steps = .05
(4*M is the size of arrays used during Discrete Fourier Transformation)
-----------------------------------------------------------------------------------------
| M | kappa | G_-8,2(kappa)/(a*kappa) | G_0,0(kappa)/(a*kappa) | passage |
| 63 | .4691173717 | +.0000757834 | -.1111394979 | certain |
| 63 | .5191173717 | +.0001628013 | -.1206814887 | certain |
| 63 | .5691173717 | +.0003304881 | -.1295124702 | certain |
******************** CALCULATION COMPLETE *************************
******************* Calculation of G_-k,2(kappa)| ***********************
--> parameter a=.54 rho=0 m=1
--> 2 : 9 Resonance in .748311
--> kappa in [.698311, .798311]
--> kappa-steps = .05
(4*M is the size of arrays used during Discrete Fourier Transformation)
-----------------------------------------------------------------------------------------
| M | kappa | G_-9,2(kappa)/(a*kappa) | G_0,0(kappa)/(a*kappa) | passage |
| 63 | .6983112555 | +.0005194597 | -.1483446195 | certain |
| 63 | .7483112555 | +.0010457119 | -.1536943953 | certain |
| 63 | .7983112555 | +.0020912121 | -.1575788339 | certain |
******************** CALCULATION COMPLETE *************************
******************* Calculation of G_-k,2(kappa)| ***********************
--> parameter a=.54 rho=0 m=1
--> 2 : 10 Resonance in .853847
--> kappa in [.803847, .903847]
--> kappa-steps = .05
(4*M is the size of arrays used during Discrete Fourier Transformation)
-----------------------------------------------------------------------------------------
| M | kappa | G_-10,2(kappa)/(a*kappa) | G_0,0(kappa)/(a*kappa) | passage |
| 63 | .8038470933 | +.0008016925 | -.1578998734 | certain |
| 63 | .8538470933 | +.0018221840 | -.1595301896 | certain |
| 63 | .9038470933 | +.0043835408 | -.1578798979 | certain |
******************** CALCULATION COMPLETE *************************](https://image.slidesharecdn.com/134355b9-c3ce-41ca-8cf9-85f751f98ea6-160201091932/85/Invariant-Manifolds-Passage-through-Resonance-Stability-and-a-Computer-Assisted-Application-to-a-Synchronous-Motor-203-320.jpg)
![190 Chapter 4. Application to a Miniature Synchronous Motor
lower domain :
************************** Calculation of G_0,0(kappa) ***************************
--> parameter a=.54 rho=0 m=1
--> kappa in [0, .99]
--> kappa-steps = .0396
(4*M is the size of arrays used during Discrete Fourier Transformation)
----------------------------------------------------------------------------------
| M | kappa | G_0,0(kappa)/(-a/kappa) | G_0,0(kappa)/(-a/kappa)^2 |
| 63 | .0396000000 | -.4201593548 | +.0308116860 |
| 63 | .0792000000 | -.3217383621 | +.0471882931 |
| 63 | .1188000000 | -.1877075130 | +.0412956528 |
| 63 | .1584000000 | +.0288720063 | -.0084691218 |
| 63 | .1980000000 | +.3816733055 | -.1399468786 |
| 63 | .2376000000 | +.2845189896 | -.1251883554 |
| 63 | .2772000000 | -.0786165896 | +.0403565160 |
| 63 | .3168000000 | -.2143231189 | +.1257362297 |
| 63 | .3564000000 | -.2840126584 | +.1874483545 |
| 63 | .3960000000 | -.3403317684 | +.2495766301 |
| 63 | .4356000000 | -.3915060679 | +.3158148948 |
| 63 | .4752000000 | -.4369380127 | +.3845054511 |
| 63 | .5148000000 | -.4750346552 | +.4528663713 |
| 63 | .5544000000 | -.5052282567 | +.5187010103 |
| 63 | .5940000000 | -.5278955627 | +.5806851189 |
| 63 | .6336000000 | -.5437874848 | +.6380439822 |
| 63 | .6732000000 | -.5536837671 | +.6902590963 |
| 63 | .7128000000 | -.5582166628 | +.7368459949 |
| 63 | .7524000000 | -.5577822765 | +.7771766386 |
| 63 | .7920000000 | -.5524681503 | +.8102866204 |
| 63 | .8316000000 | -.5419344965 | +.8345791246 |
| 63 | .8712000000 | -.5251401980 | +.8472261861 |
| 63 | .9108000000 | -.4995701088 | +.8426082503 |
| 63 | .9504000000 | -.4582764271 | +.8065665118 |
| 63 | .9900000000 | -.3631611966 | +.6657955272 |
******************** CALCULATION COMPLETE *************************
******************* Detection of Resonances ***********************
2 : 1-Resonance in +.1343870049......
2 : 2-Resonance in +.2651460995......
2 : 3-Resonance in +.3888961596......
2 : 4-Resonance in +.5027329013......
******************* DETECTION COMPLETE ***********************
******************* Calculation of G_-k,2(kappa)| ***********************
--> parameter a=.54 rho=0 m=1
--> 2 : 1 Resonance in .134387
--> kappa in [.084387, .184387]
--> kappa-steps = .05
(4*M is the size of arrays used during Discrete Fourier Transformation)
-------------------------------------------------------------------------------------------
| M | kappa | G_-1,2(kappa)/(-a/kappa) | G_0,0(kappa)/(-a/kappa) | passage |
| 63 | .0843870049 | +0.0000000000 | -.3067816000 | certain |
| 63 | .1343870049 | +0.0000000000 | -.1167114676 | certain |
| 63 | .1843870049 | +0.0000000000 | +.2546683406 | certain |
******************** CALCULATION COMPLETE *************************](https://image.slidesharecdn.com/134355b9-c3ce-41ca-8cf9-85f751f98ea6-160201091932/85/Invariant-Manifolds-Passage-through-Resonance-Stability-and-a-Computer-Assisted-Application-to-a-Synchronous-Motor-204-320.jpg)
![4.5. Numerical Evaluations, Discussion Following Chapter 2 191
******************* Calculation of G_-k,2(kappa)| ***********************
--> parameter a=.54 rho=0 m=1
--> 2 : 2 Resonance in .265146
--> kappa in [.215146, .315146]
--> kappa-steps = .05
(4*M is the size of arrays used during Discrete Fourier Transformation)
-------------------------------------------------------------------------------------------
| M | kappa | G_-2,2(kappa)/(-a/kappa) | G_0,0(kappa)/(-a/kappa) | passage |
| 63 | .2151460995 | -.0318656728 | +.4544844035 | certain |
| 63 | .2651460995 | -.0348682456 | -.0000191174 | mostly |
| 63 | .3151460995 | -.0384116075 | -.2106683329 | certain |
******************** CALCULATION COMPLETE *************************
******************* Calculation of G_-k,2(kappa)| ***********************
--> parameter a=.54 rho=0 m=1
--> 2 : 3 Resonance in .388896
--> kappa in [.338896, .438896]
--> kappa-steps = .05
(4*M is the size of arrays used during Discrete Fourier Transformation)
-------------------------------------------------------------------------------------------
| M | kappa | G_-3,2(kappa)/(-a/kappa) | G_0,0(kappa)/(-a/kappa) | passage |
| 63 | .3388961596 | +0.0000000000 | -.2561885854 | certain |
| 63 | .3888961596 | +0.0000000000 | -.3306452525 | certain |
| 63 | .4388961596 | +0.0000000000 | -.3955309217 | certain |
******************** CALCULATION COMPLETE *************************
******************* Calculation of G_-k,2(kappa)| ***********************
--> parameter a=.54 rho=0 m=1
--> 2 : 4 Resonance in .502732
--> kappa in [.452732, .552732]
--> kappa-steps = .05
(4*M is the size of arrays used during Discrete Fourier Transformation)
-------------------------------------------------------------------------------------------
| M | kappa | G_-4,2(kappa)/(-a/kappa) | G_0,0(kappa)/(-a/kappa) | passage |
| 63 | .4527329013 | -.0017777368 | -.4119719930 | certain |
| 63 | .5027329013 | -.0023731029 | -.4642610553 | certain |
| 63 | .5527329013 | -.0031129066 | -.5041134724 | certain |
******************** CALCULATION COMPLETE *************************
The calculations carried out for the upper and central domain yield
P
P=-1
Q
Figure 4.25: a = 0.54, ̺ = 0,
m = 1
the same qualitative interpretation as in section 4.5.2. By ways of
contrast the drift in the lower domain has two zeroes. The first at
P ≈ −3.8 indicates a repulsive set while the second at P ≈ −2 cor-
responds to an attractive area. As this zero and the 2 : 2 resonance
are close and possibly identical, the results of section 2.3 might not
be applicable here. However we note that P < −1 physically corre-
sponds to negative values for d
dτ ϑ. Thus the solutions in the lower
domain are attracted by a region implying backward rotation. As we
consider the case of an external torque m = 1 this is not surprising if
the load is sufficiently large to compete with the force of the motor.](https://image.slidesharecdn.com/134355b9-c3ce-41ca-8cf9-85f751f98ea6-160201091932/85/Invariant-Manifolds-Passage-through-Resonance-Stability-and-a-Computer-Assisted-Application-to-a-Synchronous-Motor-205-320.jpg)

![4.5. Numerical Evaluations, Discussion Following Chapter 2 193
upper domain :
*********************** Calculation of G_0,0(kappa) ***************************
--> parameter a=4.1 rho=0 m=0
--> kappa in [0, .99]
--> kappa-steps = .0396
(4*M is the size of arrays used during Discrete Fourier Transformation)
--------------------------------------------------------------------------------
| M | kappa | G_0,0(kappa)/(a/kappa) | G_0,0(kappa)/(a/kappa)^2 |
| 63 | .0396000000 | -.0095669817 | -.0000924030 |
| 63 | .0792000000 | -.0189572528 | -.0003661986 |
| 63 | .1188000000 | -.0281792944 | -.0008165122 |
| 63 | .1584000000 | -.0372402044 | -.0014387435 |
| 63 | .1980000000 | -.0461457952 | -.0022285042 |
| 63 | .2376000000 | -.0549006459 | -.0031815593 |
| 63 | .2772000000 | -.0635081130 | -.0042937680 |
| 63 | .3168000000 | -.0719702944 | -.0055610217 |
| 63 | .3564000000 | -.0802879409 | -.0069791761 |
| 63 | .3960000000 | -.0884603026 | -.0085439706 |
| 63 | .4356000000 | -.0964848886 | -.0102509310 |
| 63 | .4752000000 | -.1043571107 | -.0120952436 |
| 63 | .5148000000 | -.1120697574 | -.0140715880 |
| 63 | .5544000000 | -.1196122176 | -.0161739057 |
| 63 | .5940000000 | -.1269693146 | -.0183950665 |
| 63 | .6336000000 | -.1341195160 | -.0207263720 |
| 63 | .6732000000 | -.1410320897 | -.0231567811 |
| 63 | .7128000000 | -.1476623949 | -.0256716475 |
| 63 | .7524000000 | -.1539436566 | -.0282505383 |
| 63 | .7920000000 | -.1597715731 | -.0308631916 |
| 63 | .8316000000 | -.1649727806 | -.0334613083 |
| 63 | .8712000000 | -.1692316049 | -.0359596522 |
| 63 | .9108000000 | -.1718847586 | -.0381835702 |
| 63 | .9504000000 | -.1711115173 | -.0396644844 |
| 63 | .9900000000 | -.1552516904 | -.0374876032 |
******************** CALCULATION COMPLETE *************************
******************* Detection of Resonances ***********************
2 : 1-Resonance in +.8038707404......
2 : 2-Resonance in +.9878039867......
******************* DETECTION COMPLETE ***********************
*********************** Calculation of G_-k,2(kappa)| ***************************
--> parameter a=4.1 rho=0 m=0
--> 2 : 1 Resonance in .803870
--> kappa in [.753870, .853870]
--> kappa-steps = .05
(4*M is the size of arrays used during Discrete Fourier Transformation)
-----------------------------------------------------------------------------------------
| M | kappa | G_-1,2(kappa)/(a/kappa) | G_0,0(kappa)/(a/kappa) | passage |
| 63 | .7538707404 | +0.0000000000 | -.1541690185 | certain |
| 63 | .8038707404 | +0.0000000000 | -.1614070977 | certain |
| 63 | .8538707404 | +0.0000000000 | -.1675141054 | certain |
******************************* CALCULATION COMPLETE **********************************](https://image.slidesharecdn.com/134355b9-c3ce-41ca-8cf9-85f751f98ea6-160201091932/85/Invariant-Manifolds-Passage-through-Resonance-Stability-and-a-Computer-Assisted-Application-to-a-Synchronous-Motor-207-320.jpg)
![194 Chapter 4. Application to a Miniature Synchronous Motor
*********************** Calculation of 2*|G_-k,2(kappa)| ***************************
--> parameter abar=4.1 rho=0 m=0
--> 2 : 2 Resonance in .987803
--> kappa in [.937803, .987803]
--> kappa-steps = .025
(4*M is the size of arrays used during Discrete Fourier Transformation)
-----------------------------------------------------------------------------------------
| M | kappa | G_-2,2(kappa)/(a/kappa) | G_0,0(kappa)/(a/kappa) | passage |
| 63 | .9378039867 | +1.1010778373 | -.1719643559 | mostly |
| 63 | .9628039867 | +.5373629107 | -.1692869165 | mostly |
| 63 | .9878039867 | +.3885728462 | -.1576711399 | mostly |
******************************* CALCULATION COMPLETE **********************************
We conclude that up to an O(ε)–set all orbits pass through the 2 : 2 resonance at κkm ≈ 0.988 situated
close to the upper separatrix.
central domain :
******************* Calculation of G_0,0(kappa) ***********************
--> parameter a=4.1 rho=0 m=0
--> kappa in [0, .99]
--> kappa-steps = .0396
(4*M is the size of arrays used during Discrete Fourier Transformation)
--------------------------------------------------------------------------------
| M | kappa | G_0,0(kappa)/(a*kappa) | G_0,0(kappa)/(a*kappa)^2 |
| 63 | .0396000000 | -.0183348688 | -.1129272532 |
| 63 | .0792000000 | -.0364810169 | -.1123460733 |
| 63 | .1188000000 | -.0542535008 | -.1113851950 |
| 63 | .1584000000 | -.0714749993 | -.1100563551 |
| 63 | .1980000000 | -.0879797762 | -.1083761718 |
| 63 | .2376000000 | -.1036177765 | -.1063662812 |
| 63 | .2772000000 | -.1182588207 | -.1040534445 |
| 63 | .3168000000 | -.1317968033 | -.1014695763 |
| 63 | .3564000000 | -.1441537322 | -.0986516467 |
| 63 | .3960000000 | -.1552833893 | -.0956414075 |
| 63 | .4356000000 | -.1651743492 | -.0924849096 |
| 63 | .4752000000 | -.1738521029 | -.0892318012 |
| 63 | .5148000000 | -.1813801006 | -.0859344384 |
| 63 | .5544000000 | -.1878597129 | -.0826469014 |
| 63 | .5940000000 | -.1934294449 | -.0794240966 |
| 63 | .6336000000 | -.1982643239 | -.0763212629 |
| 63 | .6732000000 | -.2025773916 | -.0733944146 |
| 63 | .7128000000 | -.2066270581 | -.0707026423 |
| 63 | .7524000000 | -.2107375600 | -.0683139352 |
| 63 | .7920000000 | -.2153464056 | -.0663175676 |
| 63 | .8316000000 | -.2211019890 | -.0648476604 |
| 63 | .8712000000 | -.2290058009 | -.0641128023 |
| 63 | .9108000000 | -.2399676172 | -.0642607456 |
| 63 | .9504000000 | -.2444025627 | -.0627213606 |
| 63 | .9900000000 | -.1776456195 | -.0437658584 |
******************** CALCULATION COMPLETE *************************
******************* Detection of Resonances ***********************
2 : 1-Resonance in +.3075848728......
2 : 2-Resonance in +.9867635460......
******************* DETECTION COMPLETE ***********************](https://image.slidesharecdn.com/134355b9-c3ce-41ca-8cf9-85f751f98ea6-160201091932/85/Invariant-Manifolds-Passage-through-Resonance-Stability-and-a-Computer-Assisted-Application-to-a-Synchronous-Motor-208-320.jpg)
![4.5. Numerical Evaluations, Discussion Following Chapter 2 195
******************* Calculation of G_-k,2(kappa)| ***********************
--> parameter a=4.1 rho=0 m=0
--> 2 : 1 Resonance in .307584
--> kappa in [.257584, .357584]
--> kappa-steps = .05
(4*M is the size of arrays used during Discrete Fourier Transformation)
-----------------------------------------------------------------------------------------
| M | kappa | G_-1,2(kappa)/(a*kappa) | G_0,0(kappa)/(a*kappa) | passage |
| 63 | .2575848728 | +.1614991274 | -.1111385236 | mostly |
| 63 | .3075848728 | +.2323316952 | -.1287495137 | mostly |
| 63 | .3575848728 | +.3173595687 | -.1445046992 | mostly |
******************** CALCULATION COMPLETE *************************
******************* Calculation of 2*|G_-k,2(kappa)| ***********************
--> parameter abar=4.1 rho=0 m=0
--> 2 : 2 Resonance in .986763
--> kappa in [.936763, .986763]
--> kappa-steps = .025
(4*M is the size of arrays used during Discrete Fourier Transformation)
-----------------------------------------------------------------------------------------
| M | kappa | G_-2,2(kappa)/(a*kappa) | G_0,0(kappa)/(a*kappa) | passage |
| 63 | .9367635460 | +.1340754295 | -.2461359773 | certain |
| 63 | .9617635460 | +.1540029415 | -.2354069917 | certain |
| 63 | .9867635460 | +.1516329740 | -.1838326901 | certain |
******************** CALCULATION COMPLETE *************************
For this choice of parameters all solutions up to a set of size O(ε) pass through the 2 : 1 resonance at
κkm ≈ 0.3 (i.e. P(hm) ≈ 1.23 of the central domain). The remaining solutions may possibly be captured
in this resonance. Recall that in the simulations described in section 4.2.2 we have observed such captures
for a set which becomes smaller as ε → 0 indeed.
lower domain :
************************** Calculation of G_0,0(kappa) ***************************
--> parameter a=4.1 rho=0 m=0
--> kappa in [0, .99]
--> kappa-steps = .0396
(4*M is the size of arrays used during Discrete Fourier Transformation)
----------------------------------------------------------------------------------
| M | kappa | G_0,0(kappa)/(-a/kappa) | G_0,0(kappa)/(-a/kappa)^2 |
| 63 | .0396000000 | +.0097536993 | -.0000942064 |
| 63 | .0792000000 | +.0197058472 | -.0003806592 |
| 63 | .1188000000 | +.0298701616 | -.0008655061 |
| 63 | .1584000000 | +.0402626922 | -.0015555147 |
| 63 | .1980000000 | +.0509022709 | -.0024582072 |
| 63 | .2376000000 | +.0618111018 | -.0035820287 |
| 63 | .2772000000 | +.0730155393 | -.0049365628 |
| 63 | .3168000000 | +.0845471273 | -.0065328121 |
| 63 | .3564000000 | +.0964440038 | -.0083835714 |
| 63 | .3960000000 | +.1087528323 | -.0105039320 |
| 63 | .4356000000 | +.1215315090 | -.0129119817 |
| 63 | .4752000000 | +.1348530409 | -.0156297963 |
| 63 | .5148000000 | +.1488112416 | -.0186848846 |
| 63 | .5544000000 | +.1635293431 | -.0221123580 |
| 63 | .5940000000 | +.1791734509 | -.0259582999 |
| 63 | .6336000000 | +.1959743907 | -.0302852131 |
| 63 | .6732000000 | +.2142648014 | -.0351812352 |
| 63 | .7128000000 | +.2345455049 | -.0407765941 |
| 63 | .7524000000 | +.2576118234 | -.0472749112 |
| 63 | .7920000000 | +.2848117979 | -.0550173034 |
| 63 | .8316000000 | +.3186159197 | -.0646246338 |
| 63 | .8712000000 | +.3639315869 | -.0773310240 |](https://image.slidesharecdn.com/134355b9-c3ce-41ca-8cf9-85f751f98ea6-160201091932/85/Invariant-Manifolds-Passage-through-Resonance-Stability-and-a-Computer-Assisted-Application-to-a-Synchronous-Motor-209-320.jpg)
![196 Chapter 4. Application to a Miniature Synchronous Motor
| 63 | .9108000000 | +.4302297301 | -.0955739605 |
| 63 | .9504000000 | +.5033776069 | -.1166853847 |
| 63 | .9900000000 | +.1969846936 | -.0475645967 |
******************** CALCULATION COMPLETE *************************
******************* Detection of Resonances ***********************
2 : 1-Resonance in +.8038707404......
2 : 2-Resonance in +.9878039867......
******************* DETECTION COMPLETE ***********************
******************* Calculation of G_-k,2(kappa)| ***********************
--> parameter a=4.1 rho=0 m=0
--> 2 : 1 Resonance in .803870
--> kappa in [.753870, .853870]
--> kappa-steps = .05
(4*M is the size of arrays used during Discrete Fourier Transformation)
-------------------------------------------------------------------------------------------
| M | kappa | G_-1,2(kappa)/(-a/kappa) | G_0,0(kappa)/(-a/kappa) | passage |
| 63 | .7538707404 | +0.0000000000 | +.2585372574 | certain |
| 63 | .8038707404 | +0.0000000000 | +.2940933405 | certain |
| 63 | .8538707404 | +0.0000000000 | +.3422027229 | certain |
******************** CALCULATION COMPLETE *************************
******************* Calculation of 2*|G_-k,2(kappa)| ***********************
--> parameter abar=4.1 rho=0 m=0
--> 2 : 2 Resonance in .987803
--> kappa in [.937803, .987803]
--> kappa-steps = .025
(4*M is the size of arrays used during Discrete Fourier Transformation)
-------------------------------------------------------------------------------------------
| M | kappa | G_-2,2(kappa)/(-a/kappa) | G_0,0(kappa)/(-a/kappa) | passage |
| 63 | .9378039867 | -1.3260918711 | +.4876879515 | mostly |
| 63 | .9628039867 | -.7919794060 | +.4798487513 | mostly |
| 63 | .9878039867 | -.1268307864 | +.2199931224 | certain |
******************** CALCULATION COMPLETE *************************
In the lower domain, all orbits pass the resonances arising and approach the
P
P=-1
Q
Figure 4.27: a = 4.1,
̺ = 0, m = 0
lower separatrix region.](https://image.slidesharecdn.com/134355b9-c3ce-41ca-8cf9-85f751f98ea6-160201091932/85/Invariant-Manifolds-Passage-through-Resonance-Stability-and-a-Computer-Assisted-Application-to-a-Synchronous-Motor-210-320.jpg)

![198 Chapter 4. Application to a Miniature Synchronous Motor
upper domain :
*********************** Calculation of G_0,0(kappa) ***************************
--> parameter a=4.1 rho=1 m=0
--> kappa in [0, .99]
--> kappa-steps = .0396
(4*M is the size of arrays used during Discrete Fourier Transformation)
--------------------------------------------------------------------------------
| M | kappa | G_0,0(kappa)/(a/kappa) | G_0,0(kappa)/(a/kappa)^2 |
| 63 | .0396000000 | -103.9635284755 | -1.0041355433 |
| 63 | .0792000000 | -52.1233606941 | -1.0068707724 |
| 63 | .1188000000 | -34.7942190763 | -1.0081837137 |
| 63 | .1584000000 | -26.0921659205 | -1.0080485565 |
| 63 | .1980000000 | -20.8403255244 | -1.0064352326 |
| 63 | .2376000000 | -17.3129898053 | -1.0033088726 |
| 63 | .2772000000 | -14.7704882524 | -.9986291081 |
| 63 | .3168000000 | -12.8429028620 | -.9923491772 |
| 63 | .3564000000 | -11.3246368136 | -.9844147708 |
| 63 | .3960000000 | -10.0922383712 | -.9747625353 |
| 63 | .4356000000 | -9.0670436852 | -.9633181047 |
| 63 | .4752000000 | -8.1964925365 | -.9499934764 |
| 63 | .5148000000 | -7.4440601230 | -.9346834515 |
| 63 | .5544000000 | -6.7834936337 | -.9172607001 |
| 63 | .5940000000 | -6.1953398511 | -.8975687491 |
| 63 | .6336000000 | -5.6647538438 | -.8754117159 |
| 63 | .6732000000 | -5.1800487132 | -.8505387301 |
| 63 | .7128000000 | -4.7316763584 | -.8226192459 |
| 63 | .7524000000 | -4.3114396356 | -.7912017516 |
| 63 | .7920000000 | -3.9117717760 | -.7556398162 |
| 63 | .8316000000 | -3.5248715434 | -.7149471159 |
| 63 | .8712000000 | -3.1412408050 | -.6674753632 |
| 63 | .9108000000 | -2.7461676113 | -.6100510878 |
| 63 | .9504000000 | -2.3069822442 | -.5347697377 |
| 63 | .9900000000 | -1.6581837158 | -.4003907021 |
******************** CALCULATION COMPLETE *************************
******************* Detection of Resonances ***********************
2 : 1-Resonance in +.8038707404......
2 : 2-Resonance in +.9878039867......
******************* DETECTION COMPLETE ***********************
*********************** Calculation of G_-k,2(kappa)| ***************************
--> parameter a=4.1 rho=1 m=0
--> 2 : 1 Resonance in .803870
--> kappa in [.753870, .853870]
--> kappa-steps = .05
(4*M is the size of arrays used during Discrete Fourier Transformation)
-----------------------------------------------------------------------------------------
| M | kappa | G_-1,2(kappa)/(a/kappa)| | G_0,0(kappa)/(a/kappa)|| passage |
| 63 | .7538707404 | +0.0000000000 | -4.2962744771 | certain |
| 63 | .8038707404 | +0.0000000000 | -3.7948329322 | certain |
| 63 | .8538707404 | +0.0000000000 | -3.3094704714 | certain |
******************************* CALCULATION COMPLETE **********************************](https://image.slidesharecdn.com/134355b9-c3ce-41ca-8cf9-85f751f98ea6-160201091932/85/Invariant-Manifolds-Passage-through-Resonance-Stability-and-a-Computer-Assisted-Application-to-a-Synchronous-Motor-212-320.jpg)
![4.5. Numerical Evaluations, Discussion Following Chapter 2 199
*********************** Calculation of 2*|G_-k,2(kappa)| ***************************
--> parameter abar=4.1 rho=1 m=0
--> 2 : 2 Resonance in .987803
--> kappa in [.937803, .987803]
--> kappa-steps = .025
(4*M is the size of arrays used during Discrete Fourier Transformation)
-----------------------------------------------------------------------------------------
| M | kappa | G_-2,2(kappa)/(a/kappa) | G_0,0(kappa)/(a/kappa) | passage |
| 63 | .9378039867 | +1.1010778373 | -2.4553353062 | certain |
| 63 | .9628039867 | +.5373629107 | -2.1465898444 | certain |
| 63 | .9878039867 | +.3885728462 | -1.7145290398 | certain |
******************************* CALCULATION COMPLETE **********************************
central domain :
******************* Calculation of G_0,0(kappa) ***********************
--> parameter a=4.1 rho=1 m=0
--> kappa in [0, .99]
--> kappa-steps = .0396
(4*M is the size of arrays used during Discrete Fourier Transformation)
--------------------------------------------------------------------------------
| M | kappa | G_0,0(kappa)/(a*kappa) | G_0,0(kappa)/(a*kappa)^2 |
| 63 | .0396000000 | -0.0994989434 | -.6128291663 |
| 63 | .0792000000 | -0.1987133128 | -.6119527987 |
| 63 | .1188000000 | -0.2973607928 | -.6104968235 |
| 63 | .1584000000 | -0.3951635878 | -.6084682001 |
| 63 | .1980000000 | -0.4918506650 | -.6058766506 |
| 63 | .2376000000 | -0.5871599104 | -.6027345718 |
| 63 | .2772000000 | -0.6808400647 | -.5990568267 |
| 63 | .3168000000 | -0.7726522062 | -.5948603460 |
| 63 | .3564000000 | -0.8623704436 | -.5901634526 |
| 63 | .3960000000 | -0.9497813437 | -.5849848138 |
| 63 | .4356000000 | -1.0346814769 | -.5793419096 |
| 63 | .4752000000 | -1.1168722919 | -.5732488974 |
| 63 | .5148000000 | -1.1961513356 | -.5667137300 |
| 63 | .5544000000 | -1.2722985562 | -.5597343453 |
| 63 | .5940000000 | -1.3450559918 | -.5522936650 |
| 63 | .6336000000 | -1.4140983398 | -.5443529578 |
| 63 | .6732000000 | -1.4789903074 | -.5358427559 |
| 63 | .7128000000 | -1.5391232812 | -.5266497225 |
| 63 | .7524000000 | -1.5936162517 | -.5165960801 |
| 63 | .7920000000 | -1.6411466798 | -.5054036338 |
| 63 | .8316000000 | -1.6796184458 | -.4926202928 |
| 63 | .8712000000 | -1.7053376252 | -.4774288408 |
| 63 | .9108000000 | -1.7099435467 | -.4579044813 |
| 63 | .9504000000 | -1.6601301063 | -.4260414373 |
| 63 | .9900000000 | -1.3641773148 | -.3360870448 |
******************** CALCULATION COMPLETE *************************
******************* Detection of Resonances ***********************
2 : 1-Resonance in +.3075848728......
2 : 2-Resonance in +.9867635460......
******************* DETECTION COMPLETE ***********************](https://image.slidesharecdn.com/134355b9-c3ce-41ca-8cf9-85f751f98ea6-160201091932/85/Invariant-Manifolds-Passage-through-Resonance-Stability-and-a-Computer-Assisted-Application-to-a-Synchronous-Motor-213-320.jpg)
![200 Chapter 4. Application to a Miniature Synchronous Motor
******************* Calculation of G_-k,2(kappa)| ***********************
--> parameter a=4.1 rho=1 m=0
--> 2 : 1 Resonance in .307584
--> kappa in [.257584, .357584]
--> kappa-steps = .05
(4*M is the size of arrays used during Discrete Fourier Transformation)
-----------------------------------------------------------------------------------------
| M | kappa | G_-1,2(kappa)/(a*kappa) | G_0,0(kappa)/(a*kappa) | passage |
| 63 | .2575848728 | +.1614991274 | -.6346562326 | certain |
| 63 | .3075848728 | +.2323316952 | -.7514659023 | certain |
| 63 | .3575848728 | +.3173595687 | -.8650203885 | certain |
******************** CALCULATION COMPLETE *************************
******************* Calculation of 2*|G_-k,2(kappa)| ***********************
--> parameter abar=4.1 rho=1 m=0
--> 2 : 2 Resonance in .986763
--> kappa in [.936763, .986763]
--> kappa-steps = .025
(4*M is the size of arrays used during Discrete Fourier Transformation)
-----------------------------------------------------------------------------------------
| M | kappa | G_-2,2(kappa)/(a*kappa) | G_0,0(kappa)/(a*kappa) | passage |
| 63 | .9367635460 | +.1340754295 | -1.6889205617 | certain |
| 63 | .9617635460 | +.1540029415 | -1.6175647928 | certain |
| 63 | .9867635460 | +.1516329740 | -1.4111461809 | certain |
******************** CALCULATION COMPLETE *************************
lower domain :
************************** Calculation of G_0,0(kappa) ***************************
--> parameter a=4.1 rho=1 m=0
--> kappa in [0, .99]
--> kappa-steps = .0396
(4*M is the size of arrays used during Discrete Fourier Transformation)
----------------------------------------------------------------------------------
| M | kappa | G_0,0(kappa)/(-a/kappa) | G_0,0(kappa)/(-a/kappa)^2 |
| 63 | .0396000000 | +102.9641074254 | -.9944825985 |
| 63 | .0792000000 | +51.1256805330 | -.9875985117 |
| 63 | .1188000000 | +33.7994539872 | -.9793597887 |
| 63 | .1584000000 | +25.1015109210 | -.9697754463 |
| 63 | .1980000000 | +19.8550057333 | -.9588514963 |
| 63 | .2376000000 | +16.3342707219 | -.9465909081 |
| 63 | .2772000000 | +13.7996874693 | -.9329935040 |
| 63 | .3168000000 | +11.8814037494 | -.9180557823 |
| 63 | .3564000000 | +10.3739048950 | -.9017706596 |
| 63 | .3960000000 | +9.1538413796 | -.8841271186 |
| 63 | .4356000000 | +8.1426767014 | -.8651097490 |
| 63 | .4752000000 | +7.2880102489 | -.8446981634 |
| 63 | .5148000000 | +6.5535192746 | -.8228662738 |
| 63 | .5544000000 | +5.9132104045 | -.7995814264 |
| 63 | .5940000000 | +5.3479698130 | -.7748034314 |
| 63 | .6336000000 | +4.8434072866 | -.7484836236 |
| 63 | .6732000000 | +4.3884638371 | -.7205643549 |
| 63 | .7128000000 | +3.9744921582 | -.6909800025 |
| 63 | .7524000000 | +3.5946514947 | -.6596623864 |
| 63 | .7920000000 | +3.2435474970 | -.6265584433 |
| 63 | .8316000000 | +2.9171399311 | -.5916813577 |
| 63 | .8712000000 | +2.6130509022 | -.5552414502 |
| 63 | .9108000000 | +2.3304129569 | -.5176927124 |
| 63 | .9504000000 | +2.0336280953 | -.4714049126 |
| 63 | .9900000000 | +1.2319443416 | -.2974694873 |
******************** CALCULATION COMPLETE *************************](https://image.slidesharecdn.com/134355b9-c3ce-41ca-8cf9-85f751f98ea6-160201091932/85/Invariant-Manifolds-Passage-through-Resonance-Stability-and-a-Computer-Assisted-Application-to-a-Synchronous-Motor-214-320.jpg)
![4.5. Numerical Evaluations, Discussion Following Chapter 2 201
******************* Detection of Resonances ***********************
2 : 1-Resonance in +.8038707404......
2 : 2-Resonance in +.9878039867......
******************* DETECTION COMPLETE ***********************
******************* Calculation of G_-k,2(kappa)| ***********************
--> parameter a=4.1 rho=1 m=0
--> 2 : 1 Resonance in .803870
--> kappa in [.753870, .853870]
--> kappa-steps = .05
(4*M is the size of arrays used during Discrete Fourier Transformation)
-------------------------------------------------------------------------------------------
| M | kappa | G_-1,2(kappa)/(-a/kappa) | G_0,0(kappa)/(-a/kappa) | passage |
| 63 | .7538707404 | +0.0000000000 | +3.5811268746 | certain |
| 63 | .8038707404 | +0.0000000000 | +3.1432550380 | certain |
| 63 | .8538707404 | +0.0000000000 | +2.7434415410 | certain |
******************** CALCULATION COMPLETE *************************
******************* Calculation of 2*|G_-k,2(kappa)| ***********************
--> parameter abar=4.1 rho=1 m=0
--> 2 : 2 Resonance in .987803
--> kappa in [.937803, .987803]
--> kappa-steps = .025
(4*M is the size of arrays used during Discrete Fourier Transformation)
-------------------------------------------------------------------------------------------
| M | kappa | G_-2,2(kappa)/(-a/kappa) | G_0,0(kappa)/(-a/kappa) | passage |
| 63 | .9378039867 | -1.3260918711 | +2.1403696584 | certain |
| 63 | .9628039867 | -.7919794060 | +1.8811404240 | certain |
| 63 | .9878039867 | -.1268307864 | +1.2949954190 | certain |
******************** CALCULATION COMPLETE *************************
Since ̺ is sufficiently large all solutions pass through the resonances appear-
P
P=-1
Q
Figure 4.29: a = 4.1,
̺ = 1, m = 0
ing in each of the three domains. The solutions of the upper and lower
domains tend towards the separatrices while the periodic solution near the
origin is globally attractive on the central domain.](https://image.slidesharecdn.com/134355b9-c3ce-41ca-8cf9-85f751f98ea6-160201091932/85/Invariant-Manifolds-Passage-through-Resonance-Stability-and-a-Computer-Assisted-Application-to-a-Synchronous-Motor-215-320.jpg)

![4.5. Numerical Evaluations, Discussion Following Chapter 2 203
upper domain :
*********************** Calculation of G_0,0(kappa) ***************************
--> parameter a=4.1 rho=0 m=1
--> kappa in [0, .99]
--> kappa-steps = .0396
(4*M is the size of arrays used during Discrete Fourier Transformation)
--------------------------------------------------------------------------------
| M | kappa | G_0,0(kappa)/(a/kappa) | G_0,0(kappa)/(a/kappa)^2 |
| 63 | .0396000000 | -.5093708655 | -.0049197771 |
| 63 | .0792000000 | -.5181716306 | -.0100095593 |
| 63 | .1188000000 | -.5264072726 | -.0152529717 |
| 63 | .1584000000 | -.5340789481 | -.0206336842 |
| 63 | .1980000000 | -.5411839286 | -.0261352238 |
| 63 | .2376000000 | -.5477154156 | -.0317407762 |
| 63 | .2772000000 | -.5536622177 | -.0374329675 |
| 63 | .3168000000 | -.5590082671 | -.0431936144 |
| 63 | .3564000000 | -.5637319317 | -.0490034293 |
| 63 | .3960000000 | -.5678050632 | -.0548416597 |
| 63 | .4356000000 | -.5711916907 | -.0606856342 |
| 63 | .4752000000 | -.5738462196 | -.0665101764 |
| 63 | .5148000000 | -.5757109237 | -.0722868252 |
| 63 | .5544000000 | -.5767123950 | -.0779827687 |
| 63 | .5940000000 | -.5767564018 | -.0835593421 |
| 63 | .6336000000 | -.5757202320 | -.0889698387 |
| 63 | .6732000000 | -.5734408836 | -.0941561958 |
| 63 | .7128000000 | -.5696960500 | -.0990437425 |
| 63 | .7524000000 | -.5641718105 | -.1035324073 |
| 63 | .7920000000 | -.5564038250 | -.1074809340 |
| 63 | .8316000000 | -.5456601563 | -.1106758502 |
| 63 | .8712000000 | -.5306765473 | -.1127622946 |
| 63 | .9108000000 | -.5089345715 | -.1130579531 |
| 63 | .9504000000 | -.4739216366 | -.1098573471 |
| 63 | .9900000000 | -.3892378791 | -.0939867073 |
******************** CALCULATION COMPLETE *************************
******************* Detection of Resonances ***********************
2 : 1-Resonance in +.8038707404......
2 : 2-Resonance in +.9878039867......
******************* DETECTION COMPLETE ***********************
*********************** Calculation of G_-k,2(kappa)| ***************************
--> parameter a=4.1 rho=0 m=1
--> 2 : 1 Resonance in .803870
--> kappa in [.753870, .853870]
--> kappa-steps = .05
(4*M is the size of arrays used during Discrete Fourier Transformation)
-----------------------------------------------------------------------------------------
| M | kappa | G_-1,2(kappa)/(a/kappa) | G_0,0(kappa)/(a/kappa) | passage |
| 63 | .7538707404 | +0.0000000000 | -.5639269391 | certain |
| 63 | .8038707404 | +0.0000000000 | -.5535391662 | certain |
| 63 | .8538707404 | +0.0000000000 | -.5378728793 | certain |
******************************* CALCULATION COMPLETE **********************************](https://image.slidesharecdn.com/134355b9-c3ce-41ca-8cf9-85f751f98ea6-160201091932/85/Invariant-Manifolds-Passage-through-Resonance-Stability-and-a-Computer-Assisted-Application-to-a-Synchronous-Motor-217-320.jpg)
![204 Chapter 4. Application to a Miniature Synchronous Motor
*********************** Calculation of 2*|G_-k,2(kappa)| ***************************
--> parameter abar=4.1 rho=0 m=1
--> 2 : 2 Resonance in .987803
--> kappa in [.937803, .987803]
--> kappa-steps = .025
(4*M is the size of arrays used during Discrete Fourier Transformation)
-----------------------------------------------------------------------------------------
| M | kappa | G_-2,2(kappa)/(a/kappa) | G_0,0(kappa)/(a/kappa) | passage |
| 63 | .9378039867 | +1.1010778373 | -.4873089776 | mostly |
| 63 | .9628039867 | +.5373629107 | -.4572925441 | mostly |
| 63 | .9878039867 | +.3885728462 | -.3985989415 | certain |
******************************* CALCULATION COMPLETE **********************************
central domain :
******************* Calculation of G_0,0(kappa) ***********************
--> parameter a=4.1 rho=0 m=1
--> kappa in [0, .99]
--> kappa-steps = .0396
(4*M is the size of arrays used during Discrete Fourier Transformation)
--------------------------------------------------------------------------------
| M | kappa | G_0,0(kappa)/(a*kappa) | G_0,0(kappa)/(a*kappa)^2 |
| 63 | .0396000000 | -.0183348688 | -.1129272532 |
| 63 | .0792000000 | -.0364810169 | -.1123460733 |
| 63 | .1188000000 | -.0542535008 | -.1113851950 |
| 63 | .1584000000 | -.0714749993 | -.1100563551 |
| 63 | .1980000000 | -.0879797762 | -.1083761718 |
| 63 | .2376000000 | -.1036177765 | -.1063662812 |
| 63 | .2772000000 | -.1182588207 | -.1040534445 |
| 63 | .3168000000 | -.1317968033 | -.1014695763 |
| 63 | .3564000000 | -.1441537322 | -.0986516467 |
| 63 | .3960000000 | -.1552833893 | -.0956414075 |
| 63 | .4356000000 | -.1651743492 | -.0924849096 |
| 63 | .4752000000 | -.1738521029 | -.0892318012 |
| 63 | .5148000000 | -.1813801006 | -.0859344384 |
| 63 | .5544000000 | -.1878597129 | -.0826469014 |
| 63 | .5940000000 | -.1934294449 | -.0794240966 |
| 63 | .6336000000 | -.1982643239 | -.0763212629 |
| 63 | .6732000000 | -.2025773916 | -.0733944146 |
| 63 | .7128000000 | -.2066270581 | -.0707026423 |
| 63 | .7524000000 | -.2107375600 | -.0683139352 |
| 63 | .7920000000 | -.2153464056 | -.0663175676 |
| 63 | .8316000000 | -.2211019890 | -.0648476604 |
| 63 | .8712000000 | -.2290058009 | -.0641128023 |
| 63 | .9108000000 | -.2399676172 | -.0642607456 |
| 63 | .9504000000 | -.2444025627 | -.0627213606 |
| 63 | .9900000000 | -.1776456195 | -.0437658584 |
******************** CALCULATION COMPLETE *************************
******************* Detection of Resonances ***********************
2 : 1-Resonance in +.3075848728......
2 : 2-Resonance in +.9867635460......
******************* DETECTION COMPLETE ***********************](https://image.slidesharecdn.com/134355b9-c3ce-41ca-8cf9-85f751f98ea6-160201091932/85/Invariant-Manifolds-Passage-through-Resonance-Stability-and-a-Computer-Assisted-Application-to-a-Synchronous-Motor-218-320.jpg)
![4.5. Numerical Evaluations, Discussion Following Chapter 2 205
******************* Calculation of G_-k,2(kappa)| ***********************
--> parameter a=4.1 rho=0 m=1
--> 2 : 1 Resonance in .307584
--> kappa in [.257584, .357584]
--> kappa-steps = .05
(4*M is the size of arrays used during Discrete Fourier Transformation)
-----------------------------------------------------------------------------------------
| M | kappa | G_-1,2(kappa)/(a*kappa) | G_0,0(kappa)/(a*kappa) | passage |
| 63 | .2575848728 | +.1614991274 | -.1111385236 | mostly |
| 63 | .3075848728 | +.2323316952 | -.1287495137 | mostly |
| 63 | .3575848728 | +.3173595687 | -.1445046992 | mostly |
******************** CALCULATION COMPLETE *************************
******************* Calculation of 2*|G_-k,2(kappa)| ***********************
--> parameter abar=4.1 rho=0 m=1
--> 2 : 2 Resonance in .986763
--> kappa in [.936763, .986763]
--> kappa-steps = .025
(4*M is the size of arrays used during Discrete Fourier Transformation)
-----------------------------------------------------------------------------------------
| M | kappa | G_-2,2(kappa)/(a*kappa) | G_0,0(kappa)/(a*kappa) | passage |
| 63 | .9367635460 | +.1340754295 | -.2461359773 | certain |
| 63 | .9617635460 | +.1540029415 | -.2354069917 | certain |
| 63 | .9867635460 | +.1516329740 | -.1838326901 | certain |
******************** CALCULATION COMPLETE *************************
lower domain :
************************** Calculation of G_0,0(kappa) ***************************
--> parameter a=4.1 rho=0 m=1
--> kappa in [0, .99]
--> kappa-steps = .0396
(4*M is the size of arrays used during Discrete Fourier Transformation)
----------------------------------------------------------------------------------
| M | kappa | G_0,0(kappa)/(-a/kappa) | G_0,0(kappa)/(-a/kappa)^2 |
| 63 | .0396000000 | -.4900501845 | +.0047331676 |
| 63 | .0792000000 | -.4795085305 | +.0092627013 |
| 63 | .1188000000 | -.4683578165 | +.0135709533 |
| 63 | .1584000000 | -.4565760513 | +.0176394259 |
| 63 | .1980000000 | -.4441358623 | +.0214485123 |
| 63 | .2376000000 | -.4310036677 | +.0249771881 |
| 63 | .2772000000 | -.4171385653 | +.0282026366 |
| 63 | .3168000000 | -.4024908454 | +.0310997804 |
| 63 | .3564000000 | -.3869999868 | +.0336406817 |
| 63 | .3960000000 | -.3705919282 | +.0357937569 |
| 63 | .4356000000 | -.3531752930 | +.0375227213 |
| 63 | .4752000000 | -.3346360680 | +.0387851364 |
| 63 | .5148000000 | -.3148299246 | +.0395303524 |
| 63 | .5544000000 | -.2935708342 | +.0396965049 |
| 63 | .5940000000 | -.2706136362 | +.0392059755 |
| 63 | .6336000000 | -.2456263252 | +.0379582535 |
| 63 | .6732000000 | -.2181439924 | +.0358181794 |
| 63 | .7128000000 | -.1874881501 | +.0325955008 |
| 63 | .7524000000 | -.1526163304 | +.0280069578 |
| 63 | .7920000000 | -.1118204539 | +.0216004389 |
| 63 | .8316000000 | -.0620714559 | +.0125899079 |
| 63 | .8712000000 | +.0024866445 | -.0005283816 |
| 63 | .9108000000 | +.0931799172 | -.0206995777 |
| 63 | .9504000000 | +.2005674876 | -.0464925220 |
| 63 | .9900000000 | -.0370014950 | +.0089345073 |
******************** CALCULATION COMPLETE *************************](https://image.slidesharecdn.com/134355b9-c3ce-41ca-8cf9-85f751f98ea6-160201091932/85/Invariant-Manifolds-Passage-through-Resonance-Stability-and-a-Computer-Assisted-Application-to-a-Synchronous-Motor-219-320.jpg)
![206 Chapter 4. Application to a Miniature Synchronous Motor
******************* Detection of Resonances ***********************
2 : 1-Resonance in +.8038707404......
2 : 2-Resonance in +.9878039867......
******************* DETECTION COMPLETE ***********************
******************* Calculation of G_-k,2(kappa)| ***********************
--> parameter a=4.1 rho=0 m=1
--> 2 : 1 Resonance in .803870
--> kappa in [.753870, .853870]
--> kappa-steps = .05
(4*M is the size of arrays used during Discrete Fourier Transformation)
-------------------------------------------------------------------------------------------
| M | kappa | G_-1,2(kappa)/(-a/kappa) | G_0,0(kappa)/(-a/kappa) | passage |
| 63 | .7538707404 | +0.0000000000 | -.1512206632 | certain |
| 63 | .8038707404 | +0.0000000000 | -.0980387279 | certain |
| 63 | .8538707404 | +0.0000000000 | -.0281560509 | certain |
******************** CALCULATION COMPLETE *************************
******************* Calculation of 2*|G_-k,2(kappa)| ***********************
--> parameter abar=4.1 rho=0 m=1
--> 2 : 2 Resonance in .987803
--> kappa in [.937803, .987803]
--> kappa-steps = .025
(4*M is the size of arrays used during Discrete Fourier Transformation)
-------------------------------------------------------------------------------------------
| M | kappa | G_-2,2(kappa)/(-a/kappa) | G_0,0(kappa)/(-a/kappa) | passage |
| 63 | .9378039867 | -1.3260918711 | +.1723433298 | mostly |
| 63 | .9628039867 | -.7919794060 | +.1918431237 | mostly |
| 63 | .9878039867 | -.1268307864 | -.0209346791 | mostly |
******************** CALCULATION COMPLETE *************************
The situation is qualitatively equivalent to the one observed in section 4.5.4
P
P=-1
Q
Figure 4.31: a = 4.1,
̺ = 0, m = 1
for ̺ = 0, m = 0. A passage up to a O(ε) set, however, arises in the 2 : 2
resonance at κkm ≈ 0.98 situated close to the lower separatrix here.](https://image.slidesharecdn.com/134355b9-c3ce-41ca-8cf9-85f751f98ea6-160201091932/85/Invariant-Manifolds-Passage-through-Resonance-Stability-and-a-Computer-Assisted-Application-to-a-Synchronous-Motor-220-320.jpg)

![208 Chapter 4. Application to a Miniature Synchronous Motor
upper domain :
*********************** Calculation of G_0,0(kappa) ***************************
--> parameter a=20.38 rho=0 m=0
--> kappa in [0, .99]
--> kappa-steps = .0396
(4*M is the size of arrays used during Discrete Fourier Transformation)
--------------------------------------------------------------------------------
| M | kappa | G_0,0(kappa)/(a/kappa) | G_0,0(kappa)/(a/kappa)^2 |
| 63 | .0396000000 | -.0019393189 | -.0000037682 |
| 63 | .0792000000 | -.0038711513 | -.0000150439 |
| 63 | .1188000000 | -.0057955195 | -.0000337834 |
| 63 | .1584000000 | -.0077123913 | -.0000599432 |
| 63 | .1980000000 | -.0096216679 | -.0000934784 |
| 63 | .2376000000 | -.0115231695 | -.0001343427 |
| 63 | .2772000000 | -.0134166167 | -.0001824870 |
| 63 | .3168000000 | -.0153016055 | -.0002378581 |
| 63 | .3564000000 | -.0171775757 | -.0003003968 |
| 63 | .3960000000 | -.0190437667 | -.0003700358 |
| 63 | .4356000000 | -.0208991584 | -.0004466964 |
| 63 | .4752000000 | -.0227423881 | -.0005302837 |
| 63 | .5148000000 | -.0245716332 | -.0006206809 |
| 63 | .5544000000 | -.0263844401 | -.0007177396 |
| 63 | .5940000000 | -.0281774695 | -.0008212667 |
| 63 | .6336000000 | -.0299461040 | -.0009310035 |
| 63 | .6732000000 | -.0316838219 | -.0010465921 |
| 63 | .7128000000 | -.0333811511 | -.0011675213 |
| 63 | .7524000000 | -.0350238227 | -.0012930286 |
| 63 | .7920000000 | -.0365892724 | -.0014219187 |
| 63 | .8316000000 | -.0380393704 | -.0015521854 |
| 63 | .8712000000 | -.0393032314 | -.0016801263 |
| 63 | .9108000000 | -.0402279060 | -.0017978202 |
| 63 | .9504000000 | -.0403803780 | -.0018830967 |
| 63 | .9900000000 | -.0370744636 | -.0018009675 |
******************** CALCULATION COMPLETE *************************
******************* Detection of Resonances ***********************
******************* DETECTION COMPLETE ***********************
central domain :
******************* Calculation of G_0,0(kappa) ***********************
--> parameter a=20.38 rho=0 m=0
--> kappa in [0, .99]
--> kappa-steps = .0396
(4*M is the size of arrays used during Discrete Fourier Transformation)
--------------------------------------------------------------------------------
| M | kappa | G_0,0(kappa)/(a*kappa) | G_0,0(kappa)/(kappa*a)^2 |
| 63 | .0396000000 | -.0039625525 | -.0049099341 |
| 63 | .0792000000 | -.0079113463 | -.0049014100 |
| 63 | .1188000000 | -.0118325499 | -.0048871731 |
| 63 | .1584000000 | -.0157121835 | -.0048671775 |
| 63 | .1980000000 | -.0195360393 | -.0048413574 |
| 63 | .2376000000 | -.0232895935 | -.0048096258 |
| 63 | .2772000000 | -.0269579065 | -.0047718717 |
| 63 | .3168000000 | -.0305255085 | -.0047279573 |
| 63 | .3564000000 | -.0339762616 | -.0046777145 |
| 63 | .3960000000 | -.0372931942 | -.0046209388 |
| 63 | .4356000000 | -.0404582925 | -.0045573827 |
| 63 | .4752000000 | -.0434522354 | -.0044867462 |
| 63 | .5148000000 | -.0462540484 | -.0044086643 |
| 63 | .5544000000 | -.0488406378 | -.0043226883 |
| 63 | .5940000000 | -.0511861489 | -.0042282614 |](https://image.slidesharecdn.com/134355b9-c3ce-41ca-8cf9-85f751f98ea6-160201091932/85/Invariant-Manifolds-Passage-through-Resonance-Stability-and-a-Computer-Assisted-Application-to-a-Synchronous-Motor-222-320.jpg)
![4.5. Numerical Evaluations, Discussion Following Chapter 2 209
| 63 | .6336000000 | -.0532610487 | -.0041246809 |
| 63 | .6732000000 | -.0550307682 | -.0040110427 |
| 63 | .7128000000 | -.0564535952 | -.0038861515 |
| 63 | .7524000000 | -.0574772234 | -.0037483731 |
| 63 | .7920000000 | -.0580326839 | -.0035953675 |
| 63 | .8316000000 | -.0580226497 | -.0034235675 |
| 63 | .8712000000 | -.0572958240 | -.0032270145 |
| 63 | .9108000000 | -.0555790142 | -.0029942195 |
| 63 | .9504000000 | -.0522260064 | -.0026963496 |
| 63 | .9900000000 | -.0439543128 | -.0021785228 |
******************** CALCULATION COMPLETE *************************
******************* Detection of Resonances ***********************
******************* DETECTION COMPLETE ***********************
lower domain :
************************** Calculation of G_0,0(kappa) ***************************
--> parameter a=20.38 rho=0 m=0
--> kappa in [0, .99]
--> kappa-steps = .0396
(4*M is the size of arrays used during Discrete Fourier Transformation)
----------------------------------------------------------------------------------
| M | kappa | G_0,0(kappa)/(-a/kappa) | G_0,0(kappa)/(-a/kappa)^2 |
| 63 | .0396000000 | +.0019468731 | -.0000037829 |
| 63 | .0792000000 | +.0039014051 | -.0000151614 |
| 63 | .1188000000 | +.0058637304 | -.0000341811 |
| 63 | .1584000000 | +.0078340060 | -.0000608884 |
| 63 | .1980000000 | +.0098124046 | -.0000953315 |
| 63 | .2376000000 | +.0117991063 | -.0001375597 |
| 63 | .2772000000 | +.0137942889 | -.0001876239 |
| 63 | .3168000000 | +.0157981158 | -.0002455762 |
| 63 | .3564000000 | +.0178107192 | -.0003114691 |
| 63 | .3960000000 | +.0198321780 | -.0003853553 |
| 63 | .4356000000 | +.0218624855 | -.0004672864 |
| 63 | .4752000000 | +.0239015033 | -.0005573108 |
| 63 | .5148000000 | +.0259488925 | -.0006554705 |
| 63 | .5544000000 | +.0280040098 | -.0007617970 |
| 63 | .5940000000 | +.0300657458 | -.0008763028 |
| 63 | .6336000000 | +.0321322654 | -.0009989697 |
| 63 | .6732000000 | +.0342005769 | -.0011297266 |
| 63 | .7128000000 | +.0362657837 | -.0012684126 |
| 63 | .7524000000 | +.0383197137 | -.0014147081 |
| 63 | .7920000000 | +.0403482266 | -.0015679978 |
| 63 | .8316000000 | +.0423254104 | -.0017270761 |
| 63 | .8712000000 | +.0441993543 | -.0018894248 |
| 63 | .9108000000 | +.0458497570 | -.0020490656 |
| 63 | .9504000000 | +.0469103056 | -.0021876130 |
| 63 | .9900000000 | +.0448817581 | -.0021802227 |
******************** CALCULATION COMPLETE *************************
******************* Detection of Resonances ***********************
******************* DETECTION COMPLETE ***********************](https://image.slidesharecdn.com/134355b9-c3ce-41ca-8cf9-85f751f98ea6-160201091932/85/Invariant-Manifolds-Passage-through-Resonance-Stability-and-a-Computer-Assisted-Application-to-a-Synchronous-Motor-223-320.jpg)

![4.5. Numerical Evaluations, Discussion Following Chapter 2 211
upper domain :
*********************** Calculation of G_0,0(kappa) ***************************
--> parameter a=20.38 rho=1 m=0
--> kappa in [0, .99]
--> kappa-steps = .0396
(4*M is the size of arrays used during Discrete Fourier Transformation)
--------------------------------------------------------------------------------
| M | kappa | G_0,0(kappa)/(a/kappa) | G_0,0(kappa)/(a/kappa)^2 |
| 63 | .0396000000 | -514.7446046884 | -1.0001906940 |
| 63 | .0792000000 | -257.0186350694 | -.9988162854 |
| 63 | .1188000000 | -170.8401221711 | -.9958688181 |
| 63 | .1584000000 | -127.5469444271 | -.9913364081 |
| 63 | .1980000000 | -101.4062465628 | -.9852029842 |
| 63 | .2376000000 | -83.8400189303 | -.9774479145 |
| 63 | .2772000000 | -71.1715986696 | -.9680454931 |
| 63 | .3168000000 | -61.5622839303 | -.9569642565 |
| 63 | .3564000000 | -53.9901926624 | -.9441660777 |
| 63 | .3960000000 | -47.8417911655 | -.9296049706 |
| 63 | .4356000000 | -42.7262068503 | -.9132255006 |
| 63 | .4752000000 | -38.3823612383 | -.8949606506 |
| 63 | .5148000000 | -34.6289339413 | -.8747289103 |
| 63 | .5544000000 | -31.3357289214 | -.8524302313 |
| 63 | .5940000000 | -28.4064354584 | -.8279402680 |
| 63 | .6336000000 | -25.7677675539 | -.8011019392 |
| 63 | .6732000000 | -23.3623042177 | -.7717126201 |
| 63 | .7128000000 | -21.1435022902 | -.7395038485 |
| 63 | .7524000000 | -19.0719149710 | -.7041074005 |
| 63 | .7920000000 | -17.1118553878 | -.6649945764 |
| 63 | .8316000000 | -15.2275872507 | -.6213572893 |
| 63 | .8712000000 | -13.3771627036 | -.5718441681 |
| 63 | .9108000000 | -11.4979629262 | -.5138540055 |
| 63 | .9504000000 | -9.4548429811 | -.4409167207 |
| 63 | .9900000000 | -6.5786499577 | -.3195713178 |
******************** CALCULATION COMPLETE *************************
******************* Detection of Resonances ***********************
******************* DETECTION COMPLETE ***********************
central domain :
******************* Calculation of G_0,0(kappa) ***********************
--> parameter a=20.38 rho=1 m=0
--> kappa in [0, .99]
--> kappa-steps = .0396
(4*M is the size of arrays used during Discrete Fourier Transformation)
--------------------------------------------------------------------------------
| M | kappa | G_0,0(kappa)/(a*kappa) | G_0,0(kappa)/(kappa*a)^2 |
| 63 | .0396000000 | -0.4074073917 | -.5048118472 |
| 63 | .0792000000 | -0.8143245635 | -.5045081355 |
| 63 | .1188000000 | -1.2202536745 | -.5039988016 |
| 63 | .1584000000 | -1.6246813141 | -.5032790224 |
| 63 | .1980000000 | -2.0270698716 | -.5023418363 |
| 63 | .2376000000 | -2.4268478103 | -.5011779163 |
| 63 | .2772000000 | -2.8233983338 | -.4997752539 |
| 63 | .3168000000 | -3.2160457796 | -.4981187270 |
| 63 | .3564000000 | -3.6040388413 | -.4961895205 |
| 63 | .3960000000 | -3.9865293677 | -.4939643450 |
| 63 | .4356000000 | -4.3625449417 | -.4914143826 |
| 63 | .4752000000 | -4.7309525895 | -.4885038425 |
| 63 | .5148000000 | -5.0904096020 | -.4851879558 |
| 63 | .5544000000 | -5.4392951812 | -.4814101322 |
| 63 | .5940000000 | -5.7756127408 | -.4770978298 |](https://image.slidesharecdn.com/134355b9-c3ce-41ca-8cf9-85f751f98ea6-160201091932/85/Invariant-Manifolds-Passage-through-Resonance-Stability-and-a-Computer-Assisted-Application-to-a-Synchronous-Motor-225-320.jpg)
![212 Chapter 4. Application to a Miniature Synchronous Motor
| 63 | .6336000000 | -6.0968457423 | -.4721563759 |
| 63 | .6732000000 | -6.3997369203 | -.4664593840 |
| 63 | .7128000000 | -6.6799348211 | -.4598332318 |
| 63 | .7524000000 | -6.9313961838 | -.4520305179 |
| 63 | .7920000000 | -7.1453033150 | -.4426814337 |
| 63 | .8316000000 | -7.3079166473 | -.4311962000 |
| 63 | .8712000000 | -7.3957452335 | -.4165430530 |
| 63 | .9108000000 | -7.3624349761 | -.3966379552 |
| 63 | .9504000000 | -7.0894277966 | -.3660164263 |
| 63 | .9900000000 | -5.9418850324 | -.2944997091 |
******************** CALCULATION COMPLETE *************************
******************* Detection of Resonances ***********************
******************* DETECTION COMPLETE ***********************
lower domain :
************************** Calculation of G_0,0(kappa) ***************************
--> parameter a=20.38 rho=1 m=0
--> kappa in [0, .99]
--> kappa-steps = .0396
(4*M is the size of arrays used during Discrete Fourier Transformation)
----------------------------------------------------------------------------------
| M | kappa | G_0,0(kappa)/(-a/kappa) | G_0,0(kappa)/(-a/kappa)^2 |
| 63 | .0396000000 | +513.7450044749 | -.9982483894 |
| 63 | .0792000000 | +256.0202365678 | -.9949363462 |
| 63 | .1188000000 | +169.8437344256 | -.9900606305 |
| 63 | .1584000000 | +126.5533885546 | -.9836141681 |
| 63 | .1980000000 +100.4163610328 | -.9755858432 |
| 63 | .2376000000 | +82.8546653279 | -.9659601806 |
| 63 | .2772000000 | +70.1916681324 | -.9547168992 |
| 63 | .3168000000 | +60.5887044950 | -.9418303034 |
| 63 | .3564000000 | +53.0239378244 | -.9272684710 |
| 63 | .3960000000 | +46.8838900555 | -.9109921718 |
| 63 | .4356000000 | +41.7777565731 | -.8929534231 |
| 63 | .4752000000 | +37.4445421356 | -.8730935438 |
| 63 | .5148000000 | +33.7030288680 | -.8513404936 |
| 63 | .5544000000 | +30.4231481363 | -.8276051681 |
| 63 | .5940000000 | +27.5087495603 | -.8017761157 |
| 63 | .6336000000 | +24.8867522833 | -.7737117883 |
| 63 | .6732000000 | +22.5000033848 | -.7432287673 |
| 63 | .7128000000 | +20.3023196126 | -.7100830922 |
| 63 | .7524000000 | +18.2547545543 | -.6739390248 |
| 63 | .7920000000 | +16.3223498381 | -.6343131046 |
| 63 | .8316000000 | +14.4704985392 | -.5904645036 |
| 63 | .8712000000 | +12.6591689417 | -.5411515202 |
| 63 | .9108000000 | +10.8294851515 | -.4839791499 |
| 63 | .9504000000 | +8.8557526701 | -.4129787702 |
| 63 | .9900000000 | +6.1184848749 | -.2972178619 |
******************** CALCULATION COMPLETE *************************
******************* Detection of Resonances ***********************
******************* DETECTION COMPLETE ***********************](https://image.slidesharecdn.com/134355b9-c3ce-41ca-8cf9-85f751f98ea6-160201091932/85/Invariant-Manifolds-Passage-through-Resonance-Stability-and-a-Computer-Assisted-Application-to-a-Synchronous-Motor-226-320.jpg)

![214 Chapter 4. Application to a Miniature Synchronous Motor
upper domain :
*********************** Calculation of G_0,0(kappa) ***************************
--> parameter a=20.38 rho=0 m=1
--> kappa in [0, .99]
--> kappa-steps = .0396
(4*M is the size of arrays used during Discrete Fourier Transformation)
--------------------------------------------------------------------------------
| M | kappa | G_0,0(kappa)/(a/kappa) | G_0,0(kappa)/(a/kappa)^2 |
| 63 | .0396000000 | -.5017432028 | -.0009749279 |
| 63 | .0792000000 | -.5030855290 | -.0019550723 |
| 63 | .1188000000 | -.5040234977 | -.0029380761 |
| 63 | .1584000000 | -.5045511349 | -.0039215358 |
| 63 | .1980000000 | -.5046598013 | -.0049029754 |
| 63 | .2376000000 | -.5043379391 | -.0058798181 |
| 63 | .2772000000 | -.5035707214 | -.0068493525 |
| 63 | .3168000000 | -.5023395783 | -.0078086937 |
| 63 | .3564000000 | -.5006215664 | -.0087547363 |
| 63 | .3960000000 | -.4983885273 | -.0096840950 |
| 63 | .4356000000 | -.4956059605 | -.0105930302 |
| 63 | .4752000000 | -.4922314970 | -.0114773507 |
| 63 | .5148000000 | -.4882127995 | -.0123322840 |
| 63 | .5544000000 | -.4834846175 | -.0131522999 |
| 63 | .5940000000 | -.4779645567 | -.0139308609 |
| 63 | .6336000000 | -.4715468200 | -.0146600620 |
| 63 | .6732000000 | -.4640926158 | -.0153300858 |
| 63 | .7128000000 | -.4554148062 | -.0159283451 |
| 63 | .7524000000 | -.4452519765 | -.0164380562 |
| 63 | .7920000000 | -.4332215243 | -.0168356941 |
| 63 | .8316000000 | -.4187267462 | -.0170860236 |
| 63 | .8712000000 | -.4007481738 | -.0171310995 |
| 63 | .9108000000 | -.3772777189 | -.0168608707 |
| 63 | .9504000000 | -.3431904973 | -.0160043301 |
| 63 | .9900000000 | -.2710606523 | -.0131673231 |
******************** CALCULATION COMPLETE *************************
******************* Detection of Resonances ***********************
******************* DETECTION COMPLETE ***********************
central domain :
******************* Calculation of G_0,0(kappa) ***********************
--> parameter a=20.38 rho=0 m=1
--> kappa in [0, .99]
--> kappa-steps = .0396
(4*M is the size of arrays used during Discrete Fourier Transformation)
--------------------------------------------------------------------------------
| M | kappa | G_0,0(kappa)/(a*kappa) | G_0,0(kappa)/(kappa*a)^2 |
| 63 | .0396000000 | -.0039625525 | -.0049099341 |
| 63 | .0792000000 | -.0079113463 | -.0049014100 |
| 63 | .1188000000 | -.0118325499 | -.0048871731 |
| 63 | .1584000000 | -.0157121835 | -.0048671775 |
| 63 | .1980000000 | -.0195360393 | -.0048413574 |
| 63 | .2376000000 | -.0232895935 | -.0048096258 |
| 63 | .2772000000 | -.0269579065 | -.0047718717 |
| 63 | .3168000000 | -.0305255085 | -.0047279573 |
| 63 | .3564000000 | -.0339762616 | -.0046777145 |
| 63 | .3960000000 | -.0372931942 | -.0046209388 |
| 63 | .4356000000 | -.0404582925 | -.0045573827 |
| 63 | .4752000000 | -.0434522354 | -.0044867462 |
| 63 | .5148000000 | -.0462540484 | -.0044086643 |
| 63 | .5544000000 | -.0488406378 | -.0043226883 |
| 63 | .5940000000 | -.0511861489 | -.0042282614 |](https://image.slidesharecdn.com/134355b9-c3ce-41ca-8cf9-85f751f98ea6-160201091932/85/Invariant-Manifolds-Passage-through-Resonance-Stability-and-a-Computer-Assisted-Application-to-a-Synchronous-Motor-228-320.jpg)
![4.5. Numerical Evaluations, Discussion Following Chapter 2 215
| 63 | .6336000000 | -.0532610487 | -.0041246809 |
| 63 | .6732000000 | -.0550307682 | -.0040110427 |
| 63 | .7128000000 | -.0564535952 | -.0038861515 |
| 63 | .7524000000 | -.0574772234 | -.0037483731 |
| 63 | .7920000000 | -.0580326839 | -.0035953675 |
| 63 | .8316000000 | -.0580226497 | -.0034235675 |
| 63 | .8712000000 | -.0572958240 | -.0032270145 |
| 63 | .9108000000 | -.0555790142 | -.0029942195 |
| 63 | .9504000000 | -.0522260064 | -.0026963496 |
| 63 | .9900000000 | -.0439543128 | -.0021785228 |
******************** CALCULATION COMPLETE *************************
******************* Detection of Resonances ***********************
******************* DETECTION COMPLETE ***********************
lower domain :
************************** Calculation of G_0,0(kappa) ***************************
--> parameter a=20.38 rho=0 m=1
--> kappa in [0, .99]
--> kappa-steps = .0396
(4*M is the size of arrays used during Discrete Fourier Transformation)
----------------------------------------------------------------------------------
| M | kappa | G_0,0(kappa)/(-a/kappa) | G_0,0(kappa)/(-a/kappa)^2 |
| 63 | .0396000000 | -.4978570106 | +.0009673767 |
| 63 | .0792000000 | -.4953129725 | +.0019248669 |
| 63 | .1188000000 | -.4923642477 | +.0028701115 |
| 63 | .1584000000 | -.4890047375 | +.0038007041 |
| 63 | .1980000000 | -.4852257287 | +.0047141655 |
| 63 | .2376000000 | -.4810156632 | +.0056079156 |
| 63 | .2772000000 | -.4763598157 | +.0064792414 |
| 63 | .3168000000 | -.4712398569 | +.0073252594 |
| 63 | .3564000000 | -.4656332715 | +.0081428703 |
| 63 | .3960000000 | -.4595125825 | +.0089287037 |
| 63 | .4356000000 | -.4528443165 | +.0096790473 |
| 63 | .4752000000 | -.4455876055 | +.0103897561 |
| 63 | .5148000000 | -.4376922737 | +.0110561326 |
| 63 | .5544000000 | -.4290961675 | +.0116727632 |
| 63 | .5940000000 | -.4197213413 | +.0122332913 |
| 63 | .6336000000 | -.4094684505 | +.0127300888 |
| 63 | .6732000000 | -.3982082170 | +.0131537670 |
| 63 | .7128000000 | -.3857678713 | +.0134924111 |
| 63 | .7524000000 | -.3719084400 | +.0137303194 |
| 63 | .7920000000 | -.3562840252 | +.0138457776 |
| 63 | .8316000000 | -.3383619652 | +.0138067620 |
| 63 | .8712000000 | -.3172455880 | +.0135615483 |
| 63 | .9108000000 | -.2912000558 | +.0130139848 |
| 63 | .9504000000 | -.2558998136 | +.0119336203 |
| 63 | .9900000000 | -.1891044304 | +.0091861327 |
******************** CALCULATION COMPLETE *************************
******************* Detection of Resonances ***********************
******************* DETECTION COMPLETE ***********************](https://image.slidesharecdn.com/134355b9-c3ce-41ca-8cf9-85f751f98ea6-160201091932/85/Invariant-Manifolds-Passage-through-Resonance-Stability-and-a-Computer-Assisted-Application-to-a-Synchronous-Motor-229-320.jpg)
![216 Chapter 4. Application to a Miniature Synchronous Motor
The qualitative behaviour for a = 20.38 is simple : The solutions contained in the
P
P=-1
Q
Figure 4.35:
a = 20.38
upper and lower domain tend towards the bound of these domains, close to the sep-
aratrices. The periodic solution near the origin is globally attractive in the central
domain. There exist no resonances for κ ∈ [0, 0.99] as the resonances are extremly
close to the separatrices (hence with values where κ is almost 1, cf. (4.58 c)).
As the set {P = −1} is contained in the central domain in the main, almost all
solutions with initial values equivalent to a startup of the synchronous motor (and
therefore P = −1) tend towards the origin (Q, P) = (0, 0) or equivalently to the pe-
riodic solution (ˇq(t, ε), ˇp(t, ε)). This, however, corresponds to a rotation of the motor
with constant frequency and small periodic perturbations in the angular speed d
dt ϑ
(cf. lemma 4.1.2). Even the addition of a linear damping (̺ = 0) or an external torque
(m = 0) has no significant influence and does not change the qualitative behaviour.](https://image.slidesharecdn.com/134355b9-c3ce-41ca-8cf9-85f751f98ea6-160201091932/85/Invariant-Manifolds-Passage-through-Resonance-Stability-and-a-Computer-Assisted-Application-to-a-Synchronous-Motor-230-320.jpg)
![4.6. The Stability of {h = 0}, Following Chapter 3 217
4.6 The Stability of {h = 0}, Following Chapter 3
In order to apply the results derived in corollary 3.2.3 let us determine the leading ε–terms of the quantity
g,1
0,0(ε) :
Recalling (4.34) and (4.35) we see
ˆF(Q, P, 0, t, ε) = ε ˆF1
(Q, P, 0, t) + ε2 ˆF2
(Q, P, 0, t) + O(ε3
)
= ε2
− ̺
0
P
− (m + ̺)
0
1 − cos(Q)
+ z0
0 + z+
0 eiQ
+ z−
0 e−iQ
+ z0
2 + z+
2 eiQ
+ z−
2 e−iQ
ei2t
+ z0
−2 + z+
−2 eiQ
+ z−
−2 e−iQ
e−i2t
+ O(ε3
)
such that
∂Q
ˆF(0, 0, 0, t, ε) = ε2
i z+
0 − z−
0 + i z+
2 − z−
2 ei2t
+ i z+
−2 − z−
−2 e−i2t
+ O(ε3
)
∂P
ˆF(0, 0, 0, t, ε) = −ε2
̺
0
1
+ O(ε3
).
The definition (3.6) of g2,1
0,0 together with (1.162) then yields
g,1
0,0(ε) =
1
(2π)2
2π
0
2π
0
g,1
(t, ϕ, ε) dt dϕ =
1
2π
2π
0
g,1
0 (t, ε) dt
=
1
2π
2π
0
1
2 ∂Q
ˆFq(0, 0, 0, t, ε) + ∂P
ˆFp(0, 0, 0, t, ε) dt
= ε2 1
2π
2π
0
1
2
1
0
i z+
0 − z−
0 + i z+
2 − z−
2 ei2t
+ i z+
−2 − z−
−2 e−i2t
− ̺/2 dt + O(ε3
)
= ε2 i
2
1
0
z+
0 − z−
0 − ̺/2 + O(ε3
).
Writing g,1
0,0(ε) = ε2
g2,1
0,0 + O(ε3
) the corresponding evaluation with Maple [15] yields
g2,1
0,0 =
−2 a10
+ 64 a8
− 736 a6
− 32768 − 14336 a2
+ 512 a4
32768 a2 − 40 a10 + 528 a8 + 65536 + 30720 a4 + a12 − 2048 a6
− ̺/2.
As the value g2,1
0,0 is negative for all parameters a ∈ [0, 20.38] (cf. figure 4.36) and ̺ ≥ 0, the set h = 0
(corresponding to the periodic solution of (4.14)) is linearly stable provided that |ε| is sufficiently small
to fulfill the theoretical considerations carried out in chapter 3.](https://image.slidesharecdn.com/134355b9-c3ce-41ca-8cf9-85f751f98ea6-160201091932/85/Invariant-Manifolds-Passage-through-Resonance-Stability-and-a-Computer-Assisted-Application-to-a-Synchronous-Motor-231-320.jpg)
![218 Chapter 4. Application to a Miniature Synchronous Motor
-0.5
-0.4
-0.3
-0.2
-0.1
0
5 10 15 20
Figure 4.36: Graph of g2,1
0,0 for a ∈ [0, 20.38] and ̺ = 0](https://image.slidesharecdn.com/134355b9-c3ce-41ca-8cf9-85f751f98ea6-160201091932/85/Invariant-Manifolds-Passage-through-Resonance-Stability-and-a-Computer-Assisted-Application-to-a-Synchronous-Motor-232-320.jpg)

![220 Chapter 4. Application to a Miniature Synchronous Motor
4.7.2 Partial Calculation of the Invariant Manifold
In this section we discuss the case where (4.14) admits a global, attractive invariant manifold. In much
the same way as in section 1.6.4 we consider the reduced system, i.e. (4.14) restricted to the manifold.
This reduced system is of perturbed pendulum type: if we denote the parametrization of the manifold
by S again then the reduced system reads
( ˙q, ˙p) = J∇H(q, p) + F(q, p, S(q, p, t, ε), t, ε). (4.59)
Using the differentiability of the map S with respect to ε we consider the representation
S(q, p, t, ε) = ε S1
(q, p, t) + ε2
S2
(q, p, t, ε) (4.60)
where S1
is BC1
. Thus the equation of invariance (derived in a similar way as (1.147)) of S implies
∂tS1
(q, p, t) + ∂(q,p)S1
(q, p, t) J ∇H(q, p) = A S1
(q, p, t) + G1
(q, p, t). (4.61)
Aiming at the discussion of the region close to the separatrices of the unperturbed system of (4.59) we
introduce the Melnikov function M : denoting the (upper or lower) separatrix solution by (qs, ps) the
corresponding Melnikov function is given by
M(t, ε) =
R
J ∇H(qs(s), ps(s)) ∧ F(qs(s), ps(s), S(qs(s), ps(s), s + t, ε), s + t, ε) ds (4.62)
(cf. e.g. formula 4.5.16 in [5]). We emphasize that in order to derive explicit formulae for this Melnikov
function it suffices to calculate S(qs(s), ps(s), s + t, ε) i.e. not the values of S for any (q, p) but evaluated
on the separatrix solutions (qs, ps) solely.
Hence we focus on the calculation of the quantity σ(τ, t, ε) := S(qs(τ), ps(τ), t, ε), in particular
σ1
(τ, t) := S1
(qs(τ), ps(τ), t).
In a first step we note that the identity ∂τ (qs(τ), ps(τ)) = J ∇H(qs(τ), ps(τ)) together with (4.61) implies
∂tσ1
(τ, t) + ∂τ σ1
(τ, t) = ∂tS1
(qs(τ), ps(τ), t) + ∂(q,p)S1
(qs(τ), ps(τ), t) J ∇H(qs(τ), ps(τ))
= A σ1
(τ, t) + G1
(qs(τ), ps(τ), t). (4.63)
Since G1
(q, p, t) =
|n|≤N
G1
n(q, p) eint
we may solve (4.63) by plugging the ansatz
σ1
(τ, t) =
|n|≤N
σ1
n(τ) eint
into (4.63):
|n|≤N
i n σ1
n(τ) eint
+
|n|≤N
∂τ σ1
n(τ) eint
= A
|n|≤N
σ1
n(τ) eint
+
|n|≤N
G1
n(qs(τ), ps(τ)) eint
.
Comparing the Fourier coefficients then yields
∂τ σ1
n(τ) = [A − i n IR3 ] σ1
n(τ) + G1
n(qs(τ), ps(τ)) (4.64)](https://image.slidesharecdn.com/134355b9-c3ce-41ca-8cf9-85f751f98ea6-160201091932/85/Invariant-Manifolds-Passage-through-Resonance-Stability-and-a-Computer-Assisted-Application-to-a-Synchronous-Motor-234-320.jpg)



![224 Chapter 4. Application to a Miniature Synchronous Motor
4.7.5 Numerical Results
In this last subsection we present the results found for the Melnikov function as in (4.68). The values
m0 and m2 were calculated via numerical integration of the formulae (4.69). We have carried out these
computations for a = 0.1 and a = 0.54. As the parameters ̺ and m do not appear inside the integrals,
these values were kept indeterminate for computations.
a = 0.1
upper separatrix lower separatrix
mupp
0 ≈ −3.0 − 6.6 ̺ − 6.2 m mlow
0 ≈ 2.2 + 5.8 ̺ + 6.2 m
mupp
2 ≈ 0.9 · 10−10
− 0.79 · 10−10
i mlow
2 ≈ 0.5 · 10−10
+ 0.4 · 10−10
i
-3
-2
-1
0
1
2
1 2 3 4 5 6
t
Melnikov functions for a=0.1, rho=0, m=0
Figure 4.37: Graph of the leading ε2
–term of the Melnikov functions for a = 0.1, ̺ = 0 and m = 0.
The function for the upper separatrix is plotted black whereas the lower one is plotted in grey.
For this choice of a the upper Melnikov function is strictly negative while the lower Melnikov function is
strictly positive. In view of the definition (4.62) we see that this result implies that the manifolds U2,+
and U2,−
are situated ”outside” the manifolds U1,−
and U1,+
as sketched in figure 4.38.
Consider two points Aupp
, Alow
on the separatrices of the unperturbed pendulum which are symmetric
with respect to the q–axis and near the hyperbolic fixed point on the right (cf. figure 4.38). Then let
B denote a parallelogram defined via the orthogonal lines through Aupp
and Alow
. Taking into account
that the real parts of the eigenvalues of the unperturbed linearized system at the fixed point are of the
same absolute value, similar arguments as used in the third step of the proof of proposition 2.3.11 imply
that the leading ε–terms of d U1,+
, U2,+
and d U1,+
, U2,−
are identical, provided that Aupp
and Alow
have been chosen sufficiently close to the hyperbolic fixed point. From formula (4.5.11) in [5] we then
deduce that for any fixed t ∈ R the ratio of the distances d U1,+
, U2,+
and d U1,−
, U2,+
at time t may
be approximated as follows:](https://image.slidesharecdn.com/134355b9-c3ce-41ca-8cf9-85f751f98ea6-160201091932/85/Invariant-Manifolds-Passage-through-Resonance-Stability-and-a-Computer-Assisted-Application-to-a-Synchronous-Motor-238-320.jpg)




![Chapter 5
Application to Van der Pol’s
Equation
5.1 Introduction
In this chapter we discuss the application of the results found in chapters 1 to 3 on the Van der Pol’s–like
equation1
x′′
(τ) − α γ + x(τ)2
x′
(τ) + x(τ) = β cos(τ/a). (5.1)
We will discuss the situation where ε :=
√
a α may be chosen sufficiently small (i.e. for |ε| < ε1) and
there exists a parameter ¯β such that β = ε2 ¯β/a2
for all |ε| < ε1.
5.2 Transformations following Chapter 1
Setting
t := τ/a q(t) := x(t a) p(t) := x′
(t a).
we rewrite (5.1) as follows:
˙q = a p
˙p = −a q + ε2
γ + q2
p + ¯β cos(t) .
(5.2)
This system is of the form (1.1) although the η–subsystem does not appear and therefore may be set to
˙η = −η. By consequence the discussion carried out in the previous chapters is much simpler and does
not require any computational assistance as for the application presented in chapter 4.
The following steps may be established at once:
1for γ = 1 (5.1) corresponds to the Van der Pol system as considered in [5], Eq.2.1.1
229](https://image.slidesharecdn.com/134355b9-c3ce-41ca-8cf9-85f751f98ea6-160201091932/85/Invariant-Manifolds-Passage-through-Resonance-Stability-and-a-Computer-Assisted-Application-to-a-Synchronous-Motor-243-320.jpg)



![Bibliography
[1] H. Amann, Ordinary Differential Equations, De Gruyter studies in mathematics 13 (1990)
[2] P.F. Byrd & M.D. Friedman, Handbook of Elliptic Integrals for Engineers and Scientists, Second
Edition, Springer (1971)
[3] DSTOOL Dynamical System Analysis Tool, Version 1.1
(available at ftp://cam.cornell.edu/pub/dsool/)
[4] N. Fenichel, Persistence and Smoothness of Invariant Manifolds for Flows, Ind. Univ. Math. J.,
Vol. 21, No. 3 (1971), 193–225
[5] J. Guckenheimer & P. Holmes, Nonlinear Oscillations, Dynamical Systems, and Bifurcations of
Vector Fields, Third Printing, Springer (1990)
[6] M.W. Hirsch, C.C. Pugh and M. Shub, Invariant Manifolds, Springer Lect. Notes in Math., Vol. 583,
Springer (1977)
[7] E. Kamke, Differentialgleichungen Bd.1, Teubner (1977)
[8] Al Kelley, The Stable, Center–Stable, Center, Center–Unstable, Unstable Manifolds, Journ. of
Diff. Eq. 3 (1967), 546–570
[9] U. Kirchgraber, F. Lasagni, K. Nipp, D. Stoffer, On the application of invariant manifold theory, in
particular to numerical analysis, Intern. Ser. of Num. Math., Vol. 97 (1991), 189–197
[10] U. Kirchgraber, K. Palmer, Geometry in the neighborhood of invariant manifolds of maps and flows
and linearization, Pitman Research Notes in Mathematics Series 233 (1990)
[11] U. Kirchgraber, E. Stiefel, Methoden der analytischen St˝orungsrechnung und ihre Anwendungen,
Teubner (1978)
[12] Laborberichte zum polarisierten Kondensatormotor (AMY12), Landis & Gyr, 1982
[13] K. Nipp & D. Stoffer, ETH Zurich, Switzerland, An Invariant Manifold Result, unpublished
manuscript
[14] D. Stoffer, On the approach of Holmes and Sanders to the Melnikov procedure in the method of
averaging, Journal of Applied Mathematics and Physics (ZAMP), Vol. 34, November 1983
[15] Maple V, Release 4, http://www.maplesoft.on.ca/
[16] Alan V. Oppenheim & Ronald W. Schafer, Digital Signal Processing, Prentice–Hall (1975)
[17] J.A. Sanders & F. Verhulst, Averaging Methods in Nonlinear Dynamical Systems, Springer (1985),
section 5.5
[18] T. Str˝om, On logarithmic norms, SIAM Num. Anal., Vol. 12, No. 5, October 1975
233](https://image.slidesharecdn.com/134355b9-c3ce-41ca-8cf9-85f751f98ea6-160201091932/85/Invariant-Manifolds-Passage-through-Resonance-Stability-and-a-Computer-Assisted-Application-to-a-Synchronous-Motor-247-320.jpg)



1) The document is a dissertation submitted to ETH Zurich that studies invariant manifolds, passage through resonance, stability, and applies these concepts to a synchronous motor model. 2) It first develops theory for a general Hamiltonian system coupled to a linear system by weak periodic perturbations, showing the persistence of invariant manifolds. It then uses averaging techniques to analyze global dynamics, assuming a finite number of resonances. 3) It represents the reduced system in a way suitable for stability analysis, covering both non-degenerate and degenerate cases. 4) The second part applies these methods to explicitly model a miniature synchronous motor, analytically deriving approximations and numerically simulating and confirming the dynamics, showing approach






















































