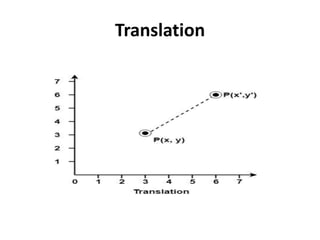
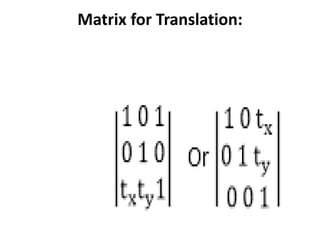
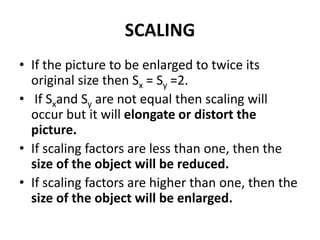
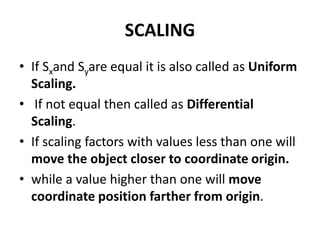
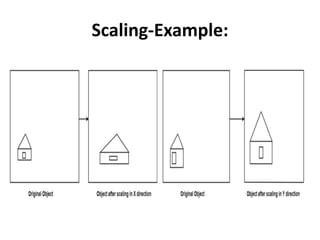
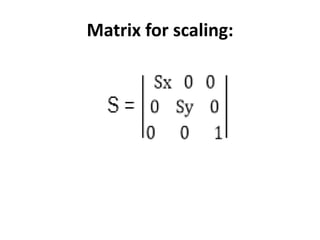
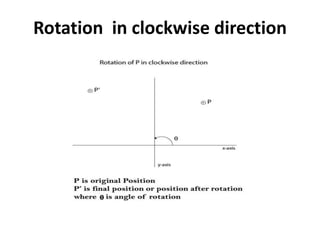
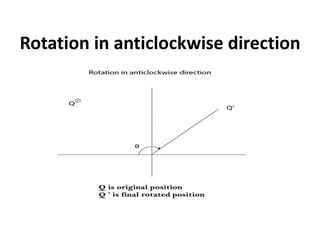
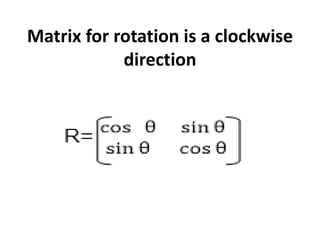
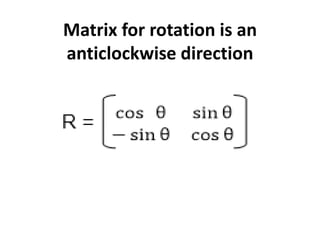
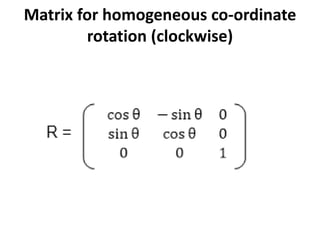
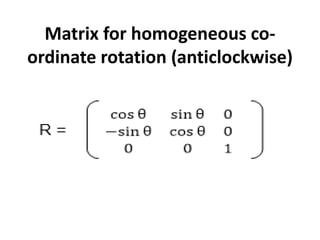
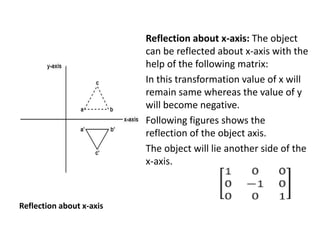
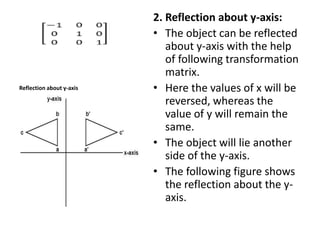
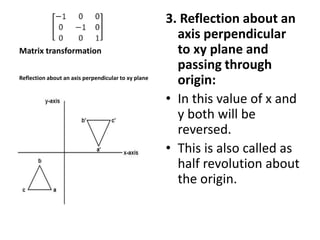
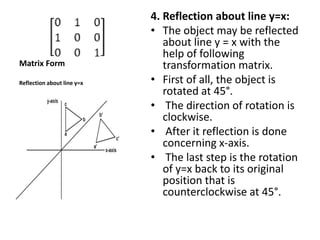
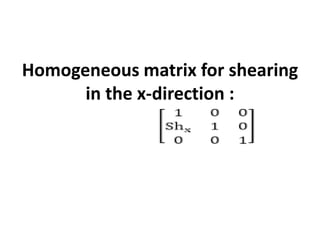
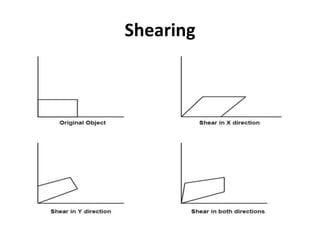
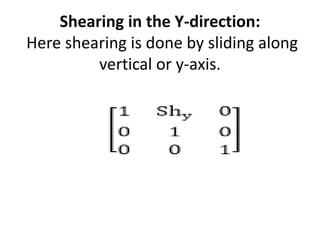
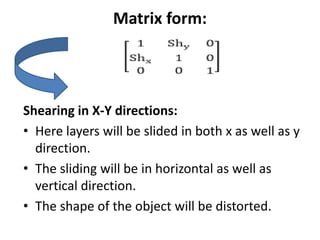
This document discusses different types of geometric transformations including translation, scaling, rotation, reflection, and shearing. Translation moves an object without changing its size or shape. Scaling enlarges or reduces the size of an object. Rotation turns an object around a fixed point. Reflection produces a mirror image of an object across an axis. Shearing skews an object by sliding layers in different directions. Each transformation can be represented using a homogeneous transformation matrix.