Downloaded 81 times
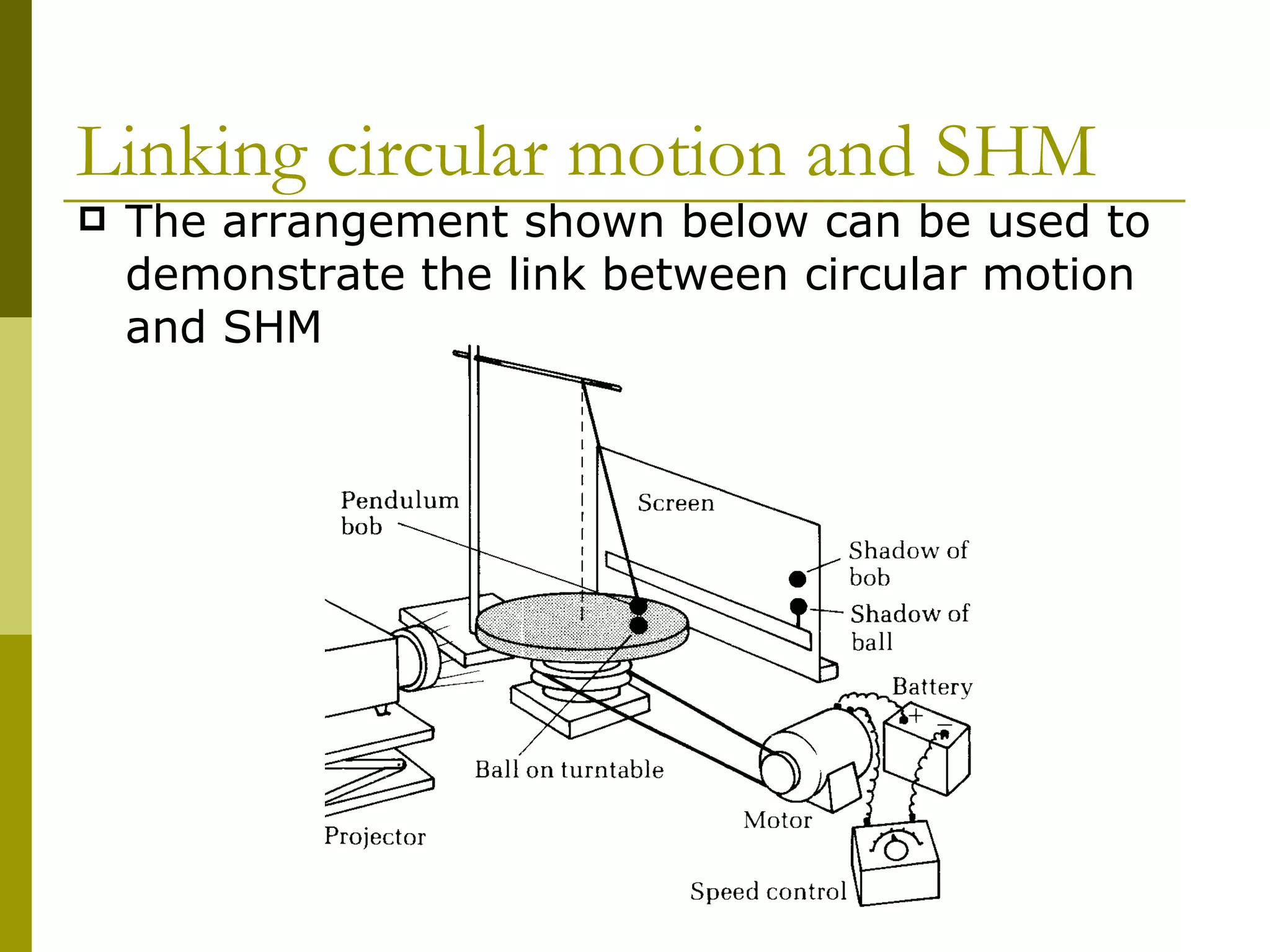
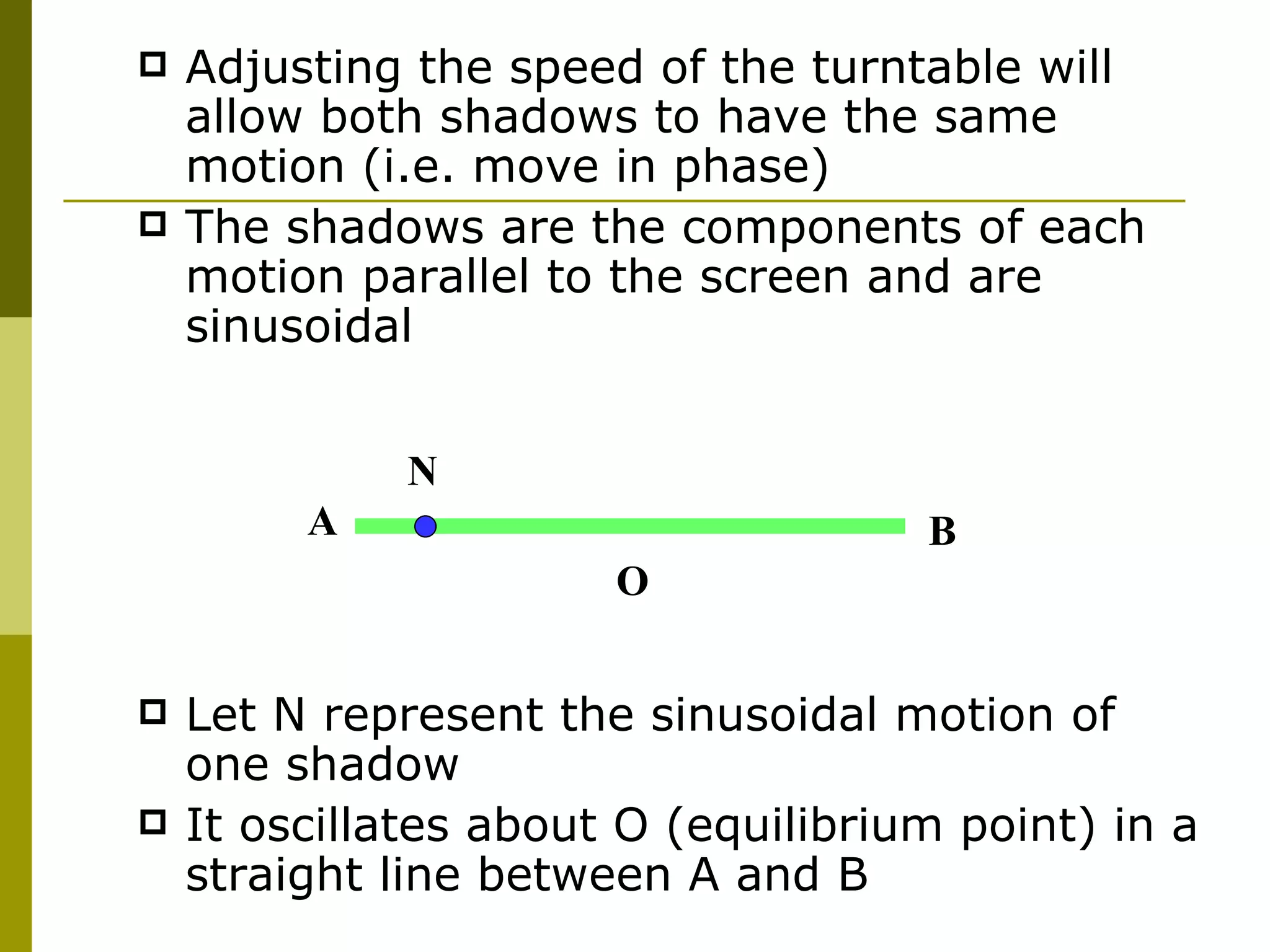
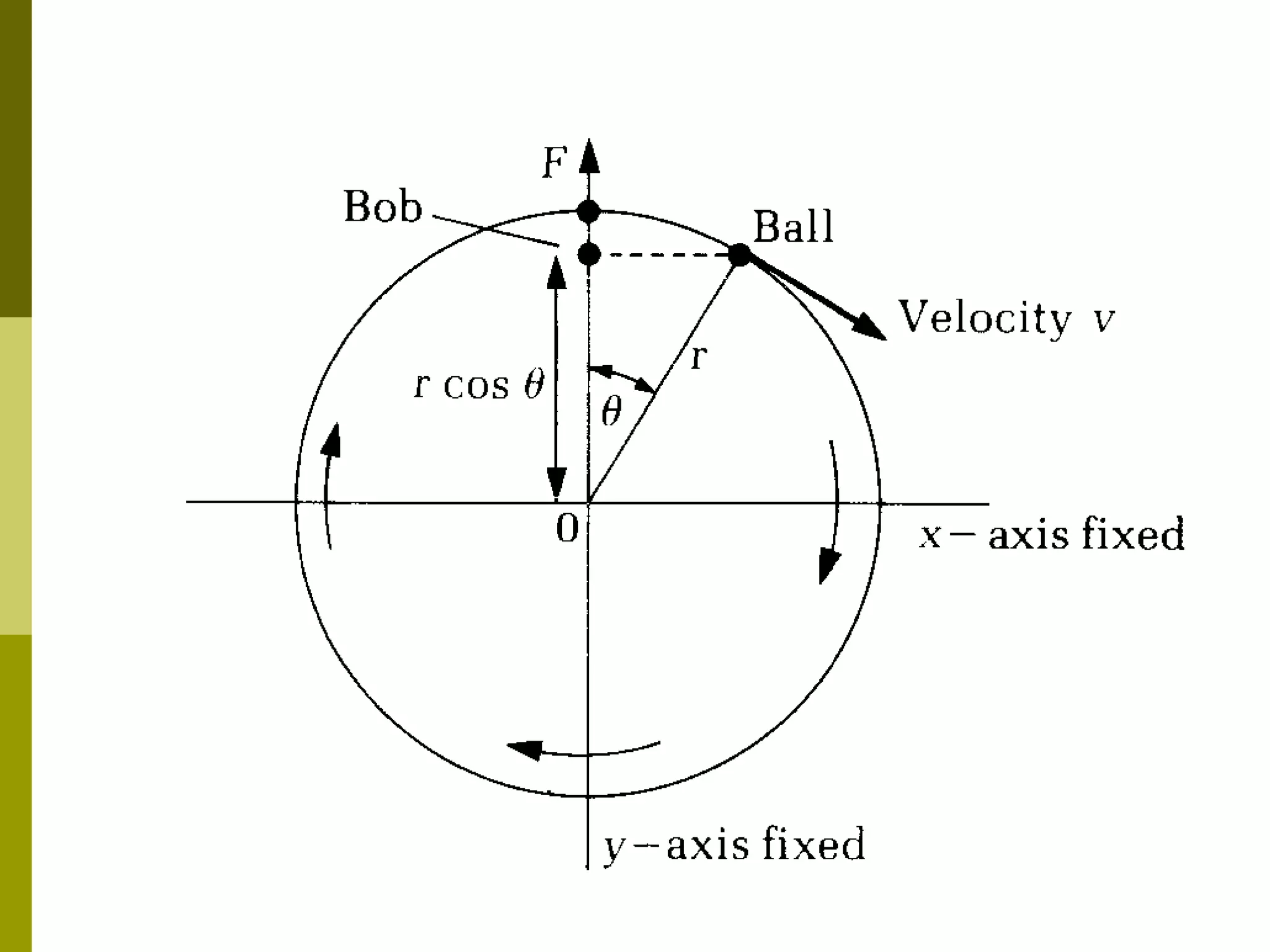
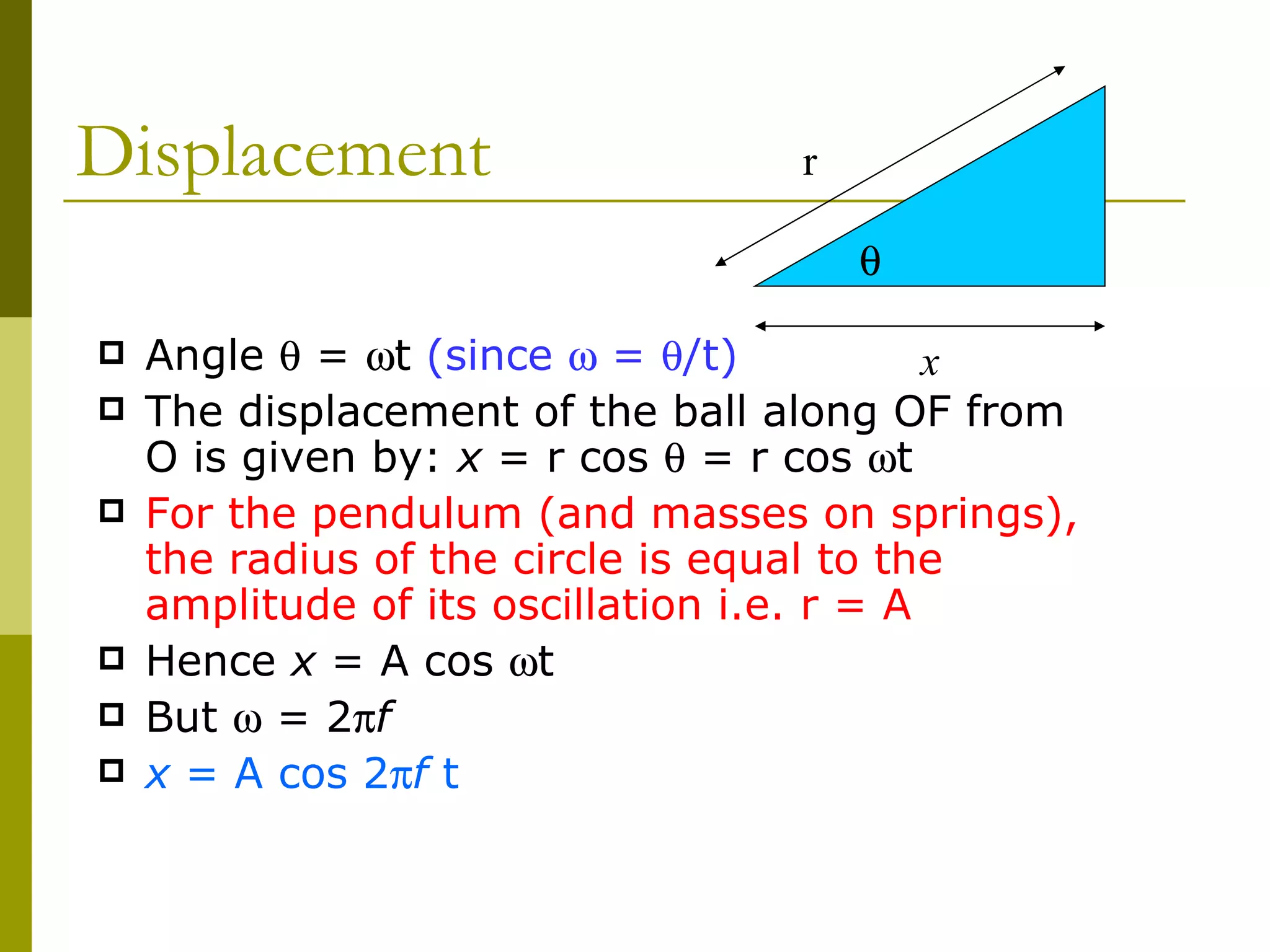
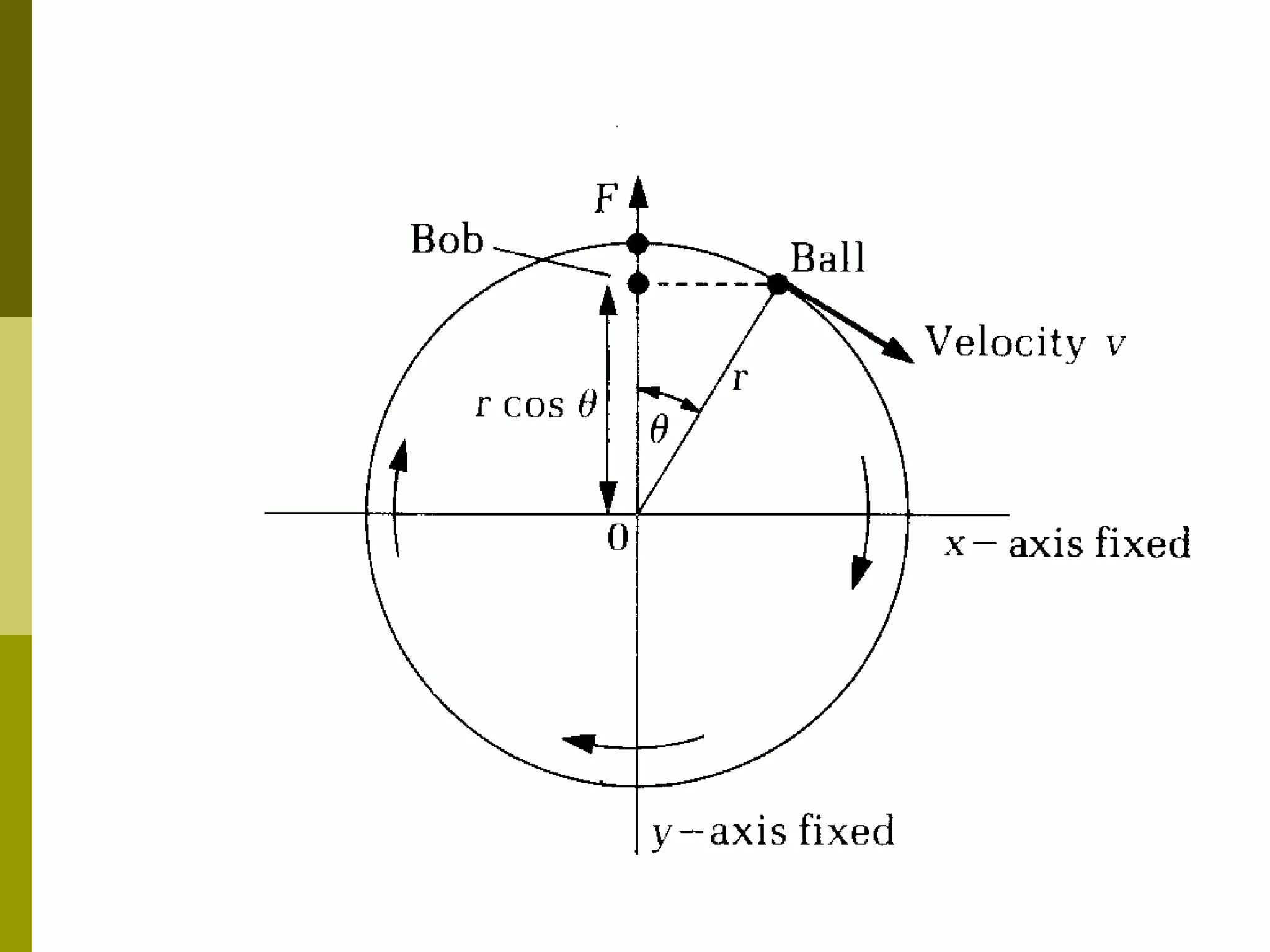
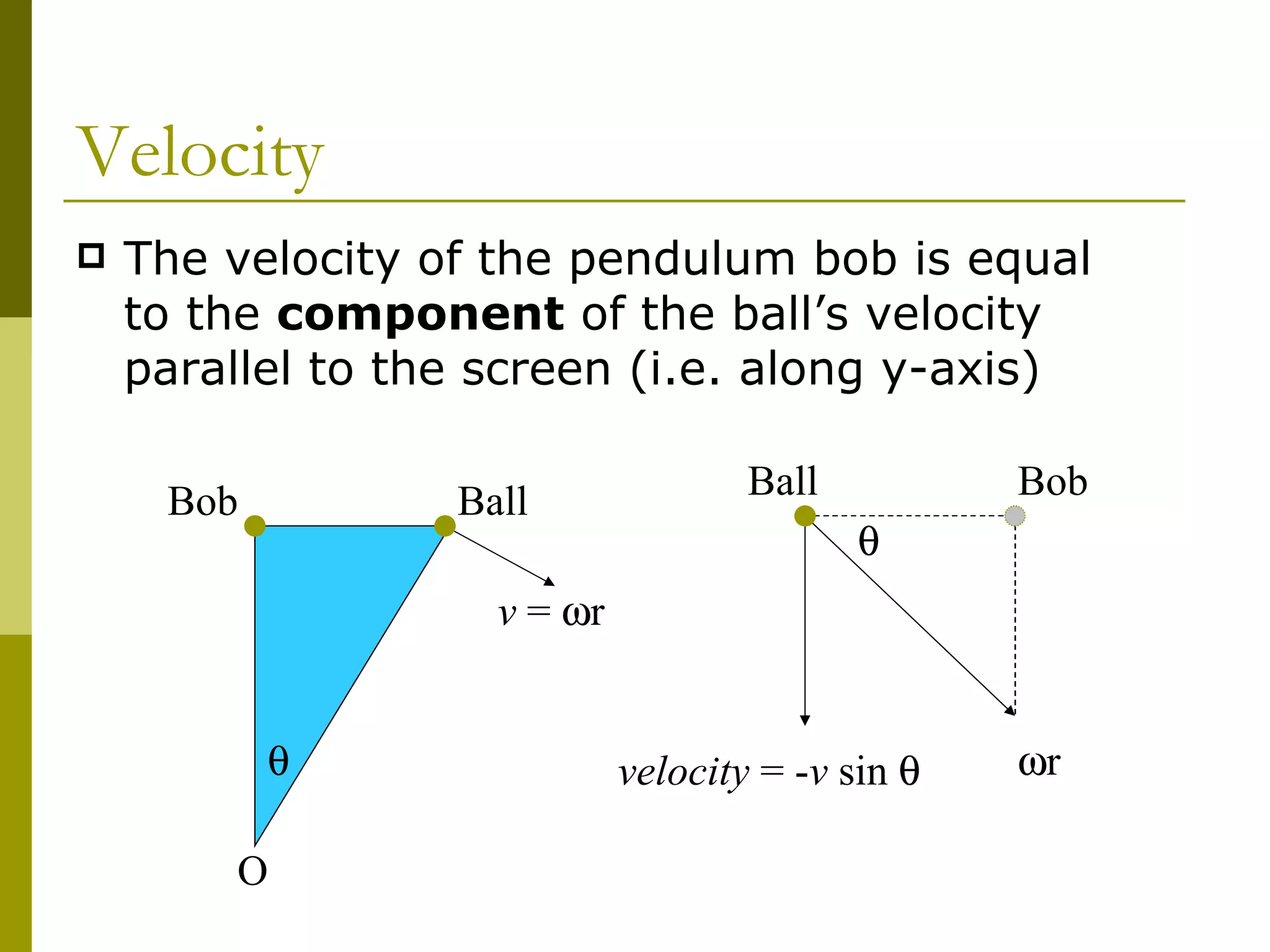
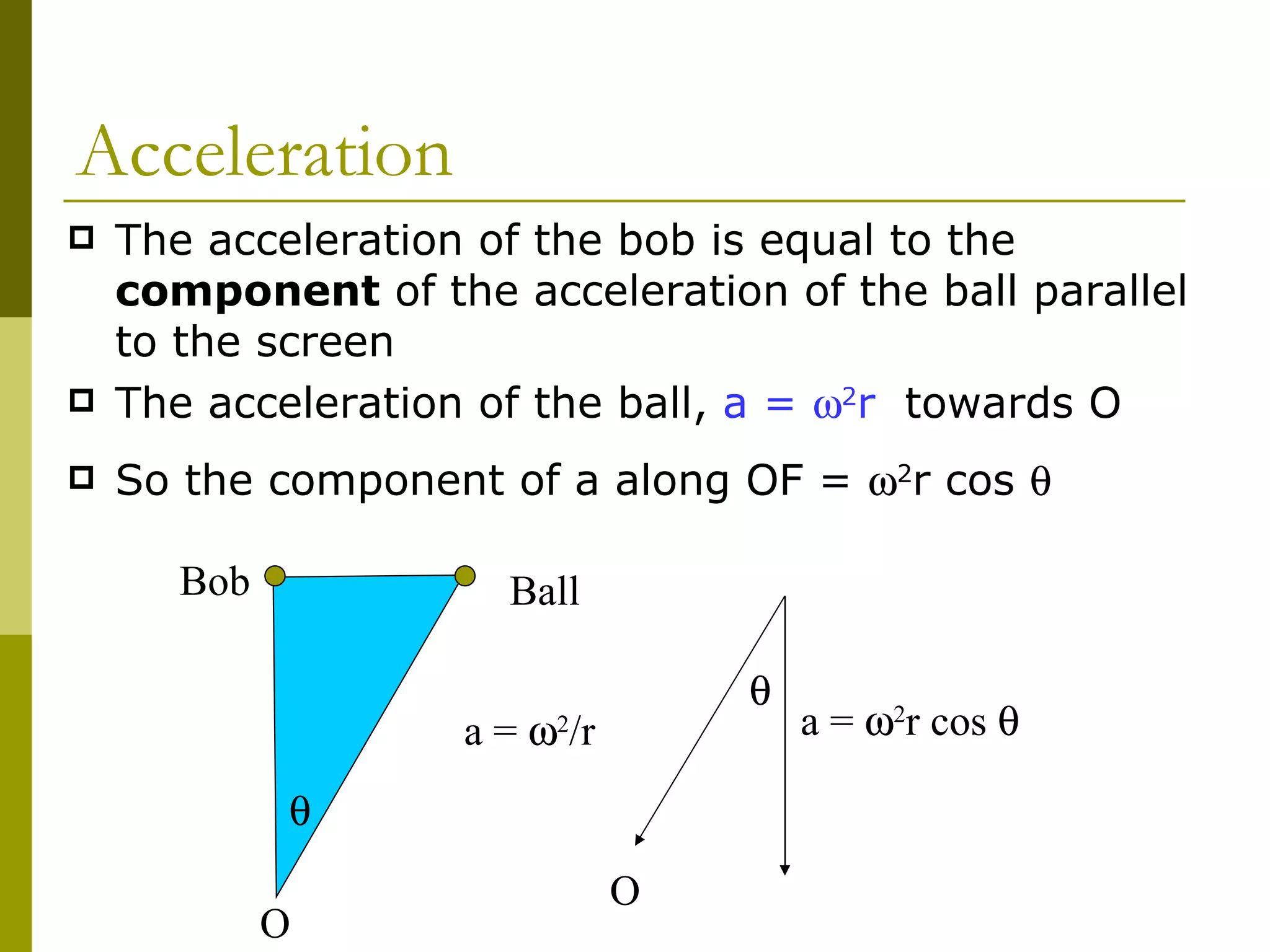
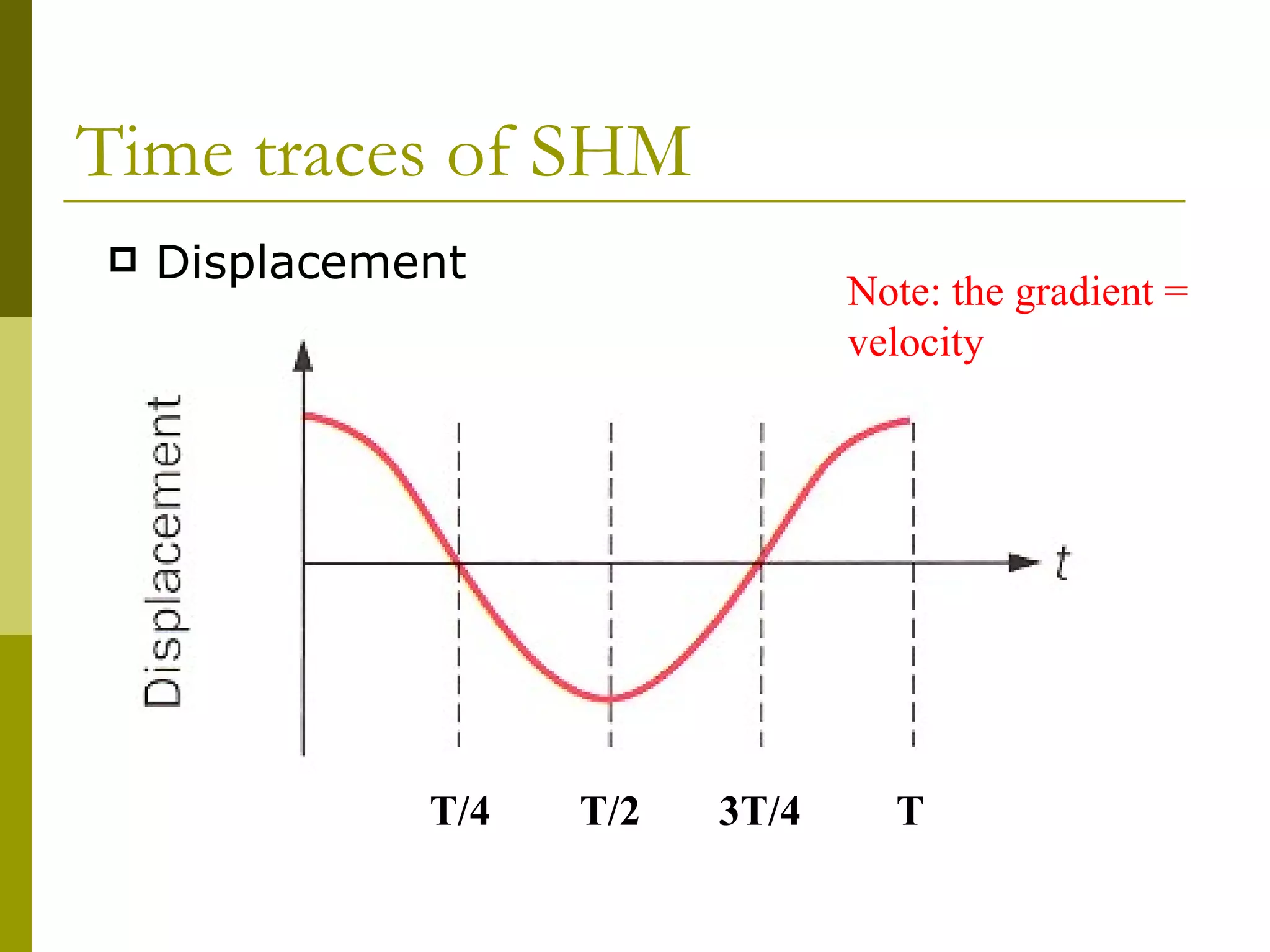
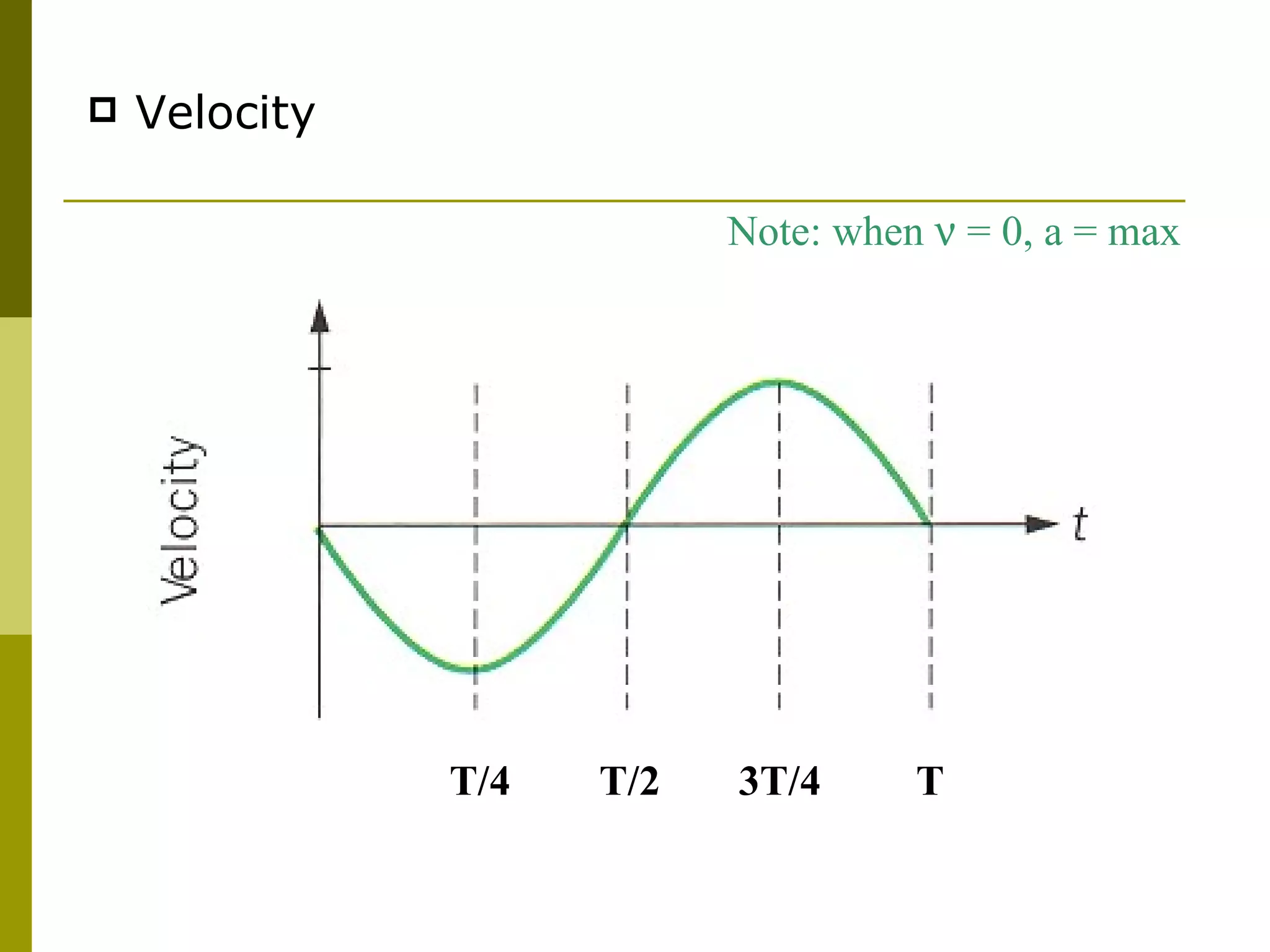
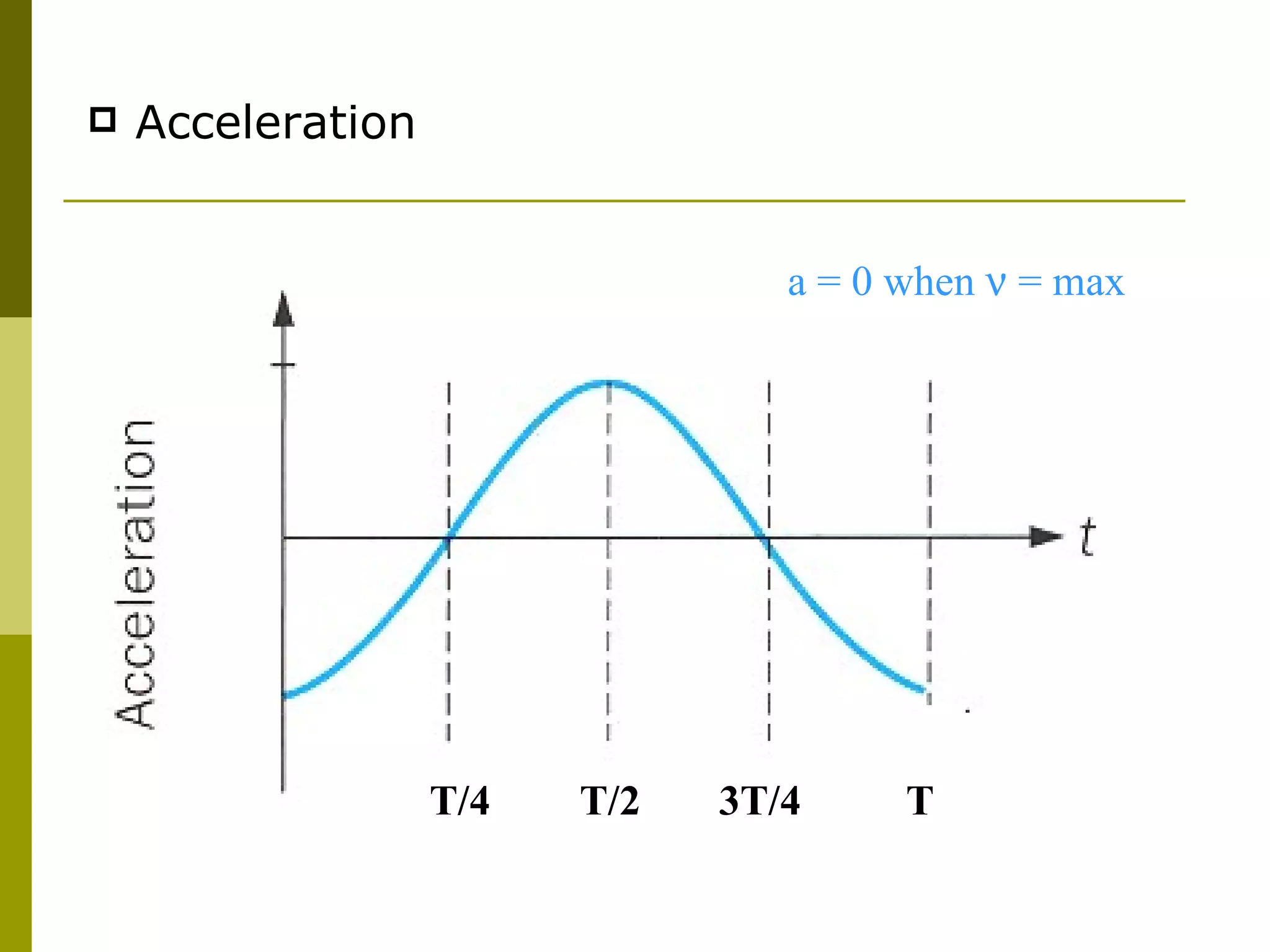
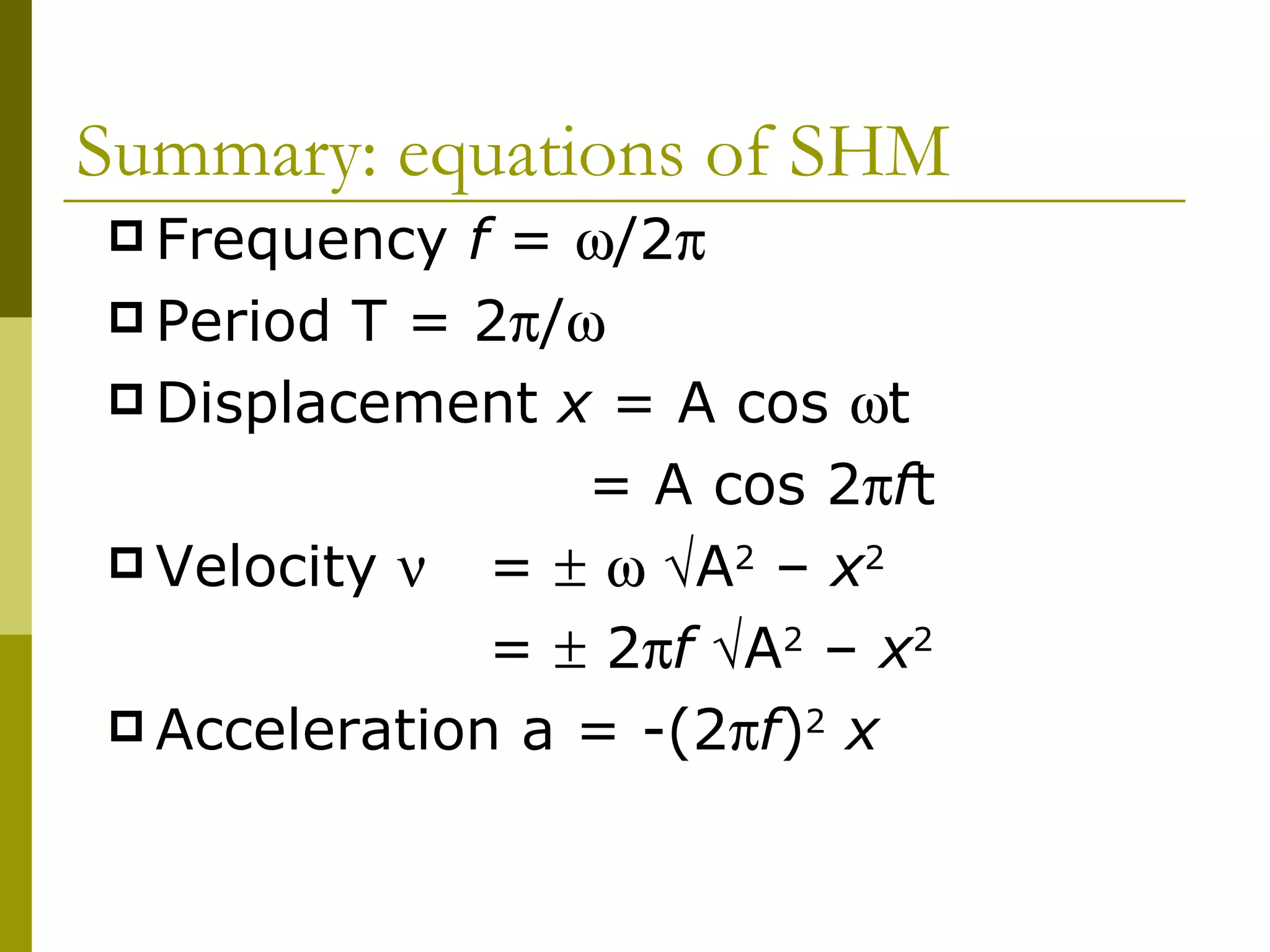

The document links circular motion to simple harmonic motion (SHM) by using the motion of a ball rotating on a turntable to represent circular motion, and the shadow of a pendulum attached to the ball to represent SHM. It derives the equations for displacement, velocity, and acceleration of the pendulum's SHM from the ball's uniform circular motion. The displacement is described by a cosine function, the velocity is described by the square root of a quantity minus the displacement squared, and the acceleration is directly proportional to and opposite in direction from the displacement. All properties vary sinusoidally with time for SHM.























































































