Downloaded 56 times
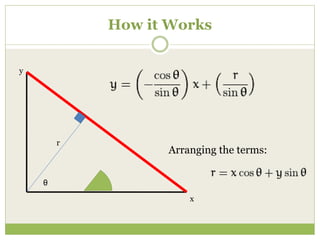
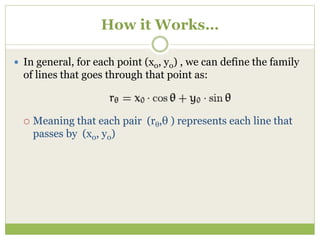
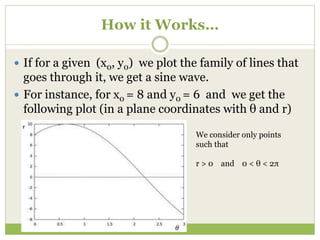
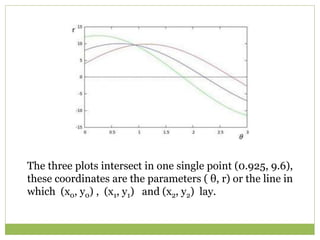


The document describes how to detect lines in an image using the Hough transform. It explains that the Hough transform represents lines in a polar coordinate system and works by plotting the curves for each edge point and finding the intersections, which indicate collinear points that make up a line. It then outlines the steps to apply this technique: 1) load an image, 2) optionally convert to grayscale and blur, 3) perform edge detection using Canny, and 4) detect lines using Hough transform by finding intersections above a threshold.























































































