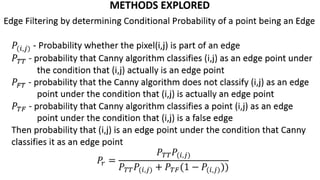
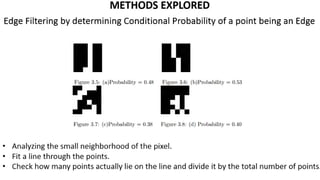
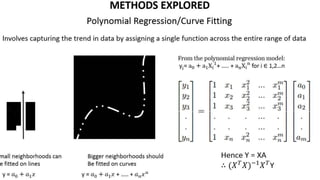
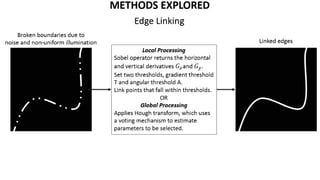
Download as PPSX, PPTX

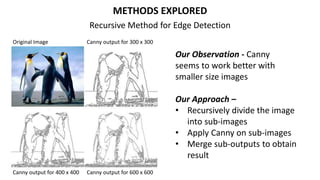
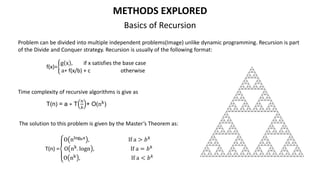
![LITERATURE SURVEY
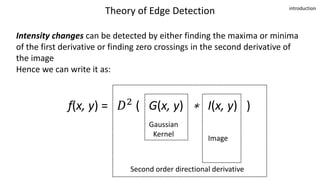
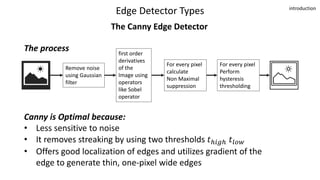
Modern Non-Canny Approaches
Wavelet transform
• Similar to Canny’s Kernel
• Selectivity is high
• Difficult to select Wavelet functions
Mathematical Morphology
• Deng Caixia et al[13]. proposed a technique,
wherein they use 2 structural elements, one of
size 3x3 and the other of size 5x5 and orient them
along different directions
• Gives them two edge sets
that fuse into edge image](https://image.slidesharecdn.com/e2822eef-6993-4540-9321-65ca5f35eb39-161009120200/85/Exploring-Methods-to-Improve-Edge-Detection-with-Canny-Algorithm-17-320.jpg)
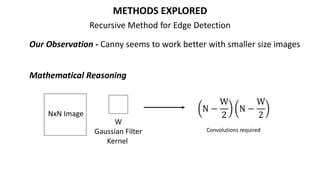
![LITERATURE SURVEY
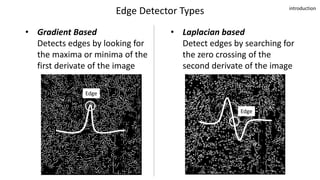
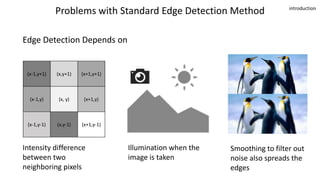
Research on Canny Edge Detector
T Rupalatha et al[15] & Qian Xu et al
Distributed Canny Edge detector on Field
Programmable Gate Array(FPGA) based architecture.
Ogawa K
Canny Edge Detection algorithm on CUDA(Compute
Unified Device Architecture)](https://image.slidesharecdn.com/e2822eef-6993-4540-9321-65ca5f35eb39-161009120200/85/Exploring-Methods-to-Improve-Edge-Detection-with-Canny-Algorithm-18-320.jpg)
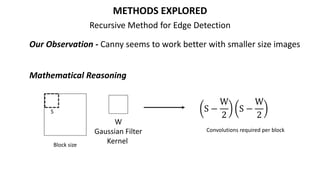
![LITERATURE SURVEY
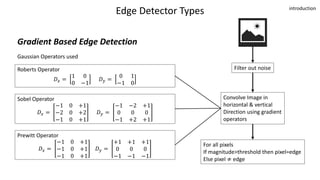
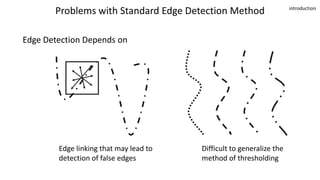
Research on Canny Edge Detector
Philip Worthington
Canny Edge detector using Curvature Consistency
Ping Zhou et al[5]
Canny Edge Detection algorithm on Otsu method for
Adaptive Thresholding](https://image.slidesharecdn.com/e2822eef-6993-4540-9321-65ca5f35eb39-161009120200/85/Exploring-Methods-to-Improve-Edge-Detection-with-Canny-Algorithm-19-320.jpg)
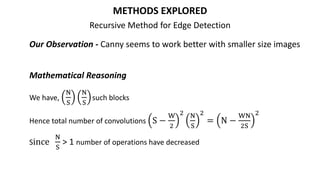
![LITERATURE SURVEY
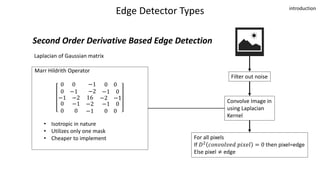
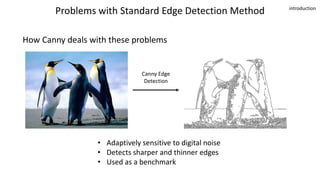
Other Approaches
Aleksandar Jevtic and Bo Li[7
Ant Based Approach for adaptive edge detection
Piotr Dollar and C.Lawrence Zitnick[10]
Edge detection algorithm using Structured Forests](https://image.slidesharecdn.com/e2822eef-6993-4540-9321-65ca5f35eb39-161009120200/85/Exploring-Methods-to-Improve-Edge-Detection-with-Canny-Algorithm-20-320.jpg)
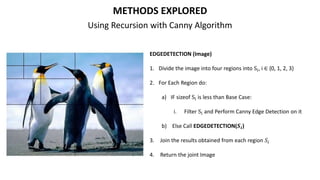
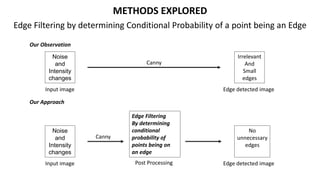
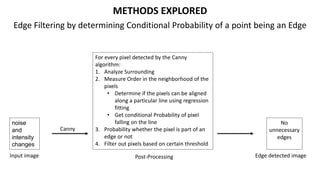
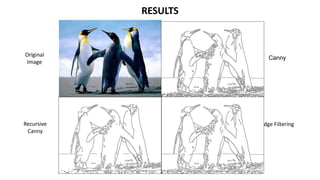
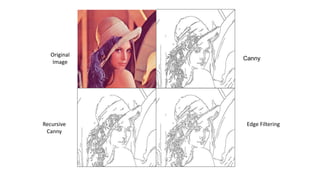
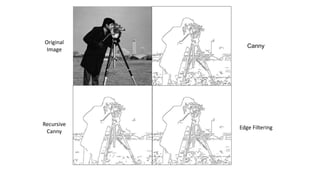
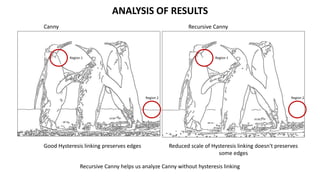
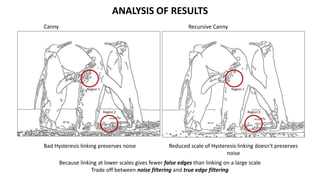
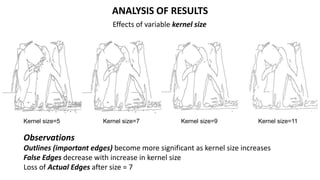
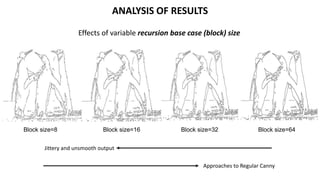
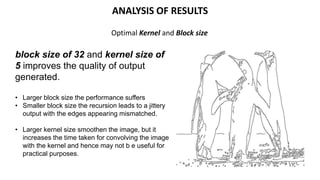
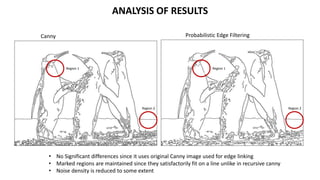
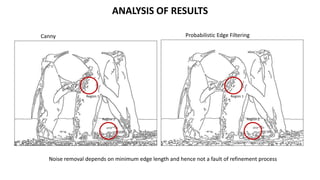
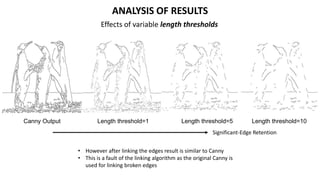
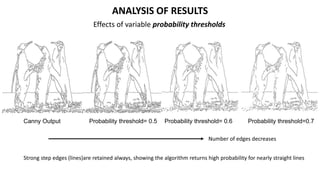
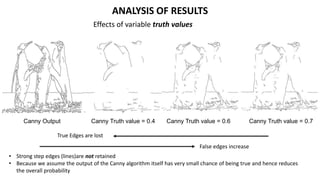
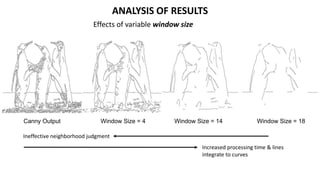
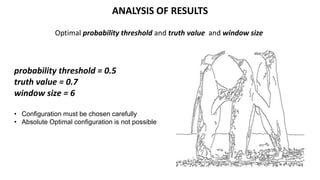


This document explores methods to improve edge detection using the Canny algorithm. It first discusses edge detection and problems with standard methods. It then surveys literature on modern non-Canny and Canny-based approaches. Three methods are explored: a recursive method that applies Canny to sub-images, edge filtering using conditional probability, and edge linking. Results show the recursive method preserves edges better at smaller scales while edge filtering and linking refine edges but depend on Canny output. Analysis finds optimal parameters are a block size of 32, kernel size of 5, and probability threshold of 0.6.