Downloaded 1,967 times




![Control Systems 1
Mathematical Models of Linear Systems
A physical system is a collection of physical objects connected together to serve an objective. An idealized
physical system is called a Physical model. Once a physical model is obtained, the next step is to obtain Mathematical
model. When a mathematical model is solved for various i/p conditions, the result represents the dynamic behavior of the
system.
Analogous System:
The concept of analogous system is very useful in practice. Since one type of system may be easier to
handle experimentally than another. A given electrical system consisting of resistance, inductance &
capacitances may be analogous to the mechanical system consisting of suitable combination of Dash pot,
Mass & Spring. The advantages of electrical systems are,
1.
2.
Many circuit theorems, impedance concepts can be applicable.
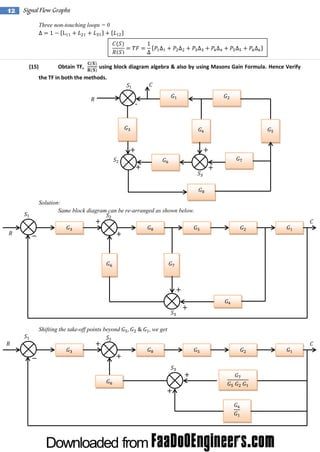
An Electrical engineer familiar with electrical systems can easily analyze the system under
study & can predict the behavior of the system.
3.
The electrical analog system is easy to handle experimentally.
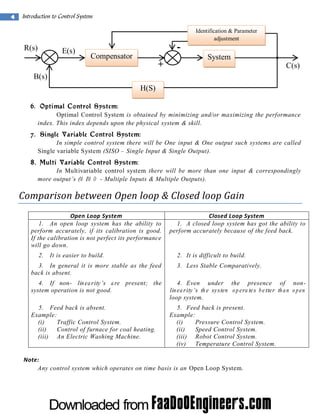
Translational System:
It has 3 types of forces due to elements.
1. Inertial Force: Due to inertial mass,
M
F(t)
Fm t
M . a
2
2
.
Where,
.
.
2. Damping Force [Viscous Damping]: Due to viscous damping, it is proportional to velocity & is given by,
D
.
Damping force is denoted by either D or B or F
3. Spring Force: Spring force is proportional to displacement.
.
.
Fk](https://image.slidesharecdn.com/someimportanttipsforcontrol-systems-131123003551-phpapp01/85/Some-important-tips-for-control-systems-7-320.jpg)








![Control Systems
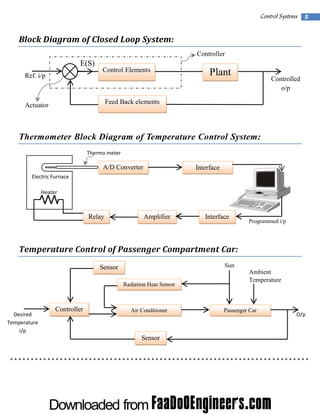
Block Diagrams
It is a representation of the control system giving the inter-relation between the transfer function of
various components. The block diagram is obtained after obtaining the differential equation & Transfer
function of all components of a control system. The arrow head pointing towards the block indicates the i/p
& pointing away from the block indicates the o/p.
If
is the TF,
After obtaining the block diagram for each & every component, all blocks are combined to obtain a
complete representation. It is then reduced to a simple form with the help of block diagram algebra.
The following block diagram reduction algebra is used,
(1) Blocks in Cascade [Series] :
G2(S)
(2) Combining blocks in Parallel:
(3) Eliminating a feed back loop:
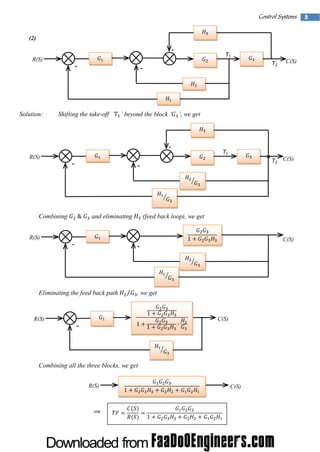
(2)
(4) Moving a take-off point beyond a block:
(3)
(6)
(2)
C(S)
G(S)
(3)
(6)
(2)
(2)
(5) Moving a Take-off point ahead of a block:
(3)
(2)
G(S)
(3)
(6)
(2)
(6)
(6)
(2)
(6)
1](https://image.slidesharecdn.com/someimportanttipsforcontrol-systems-131123003551-phpapp01/85/Some-important-tips-for-control-systems-17-320.jpg)
![Control Systems
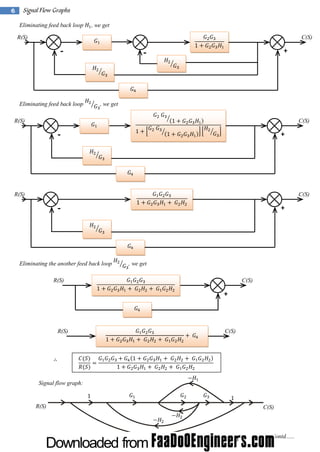
Signal Flow Graphs
By:
Sheshadri.G.S.
CIT, Gubbi.
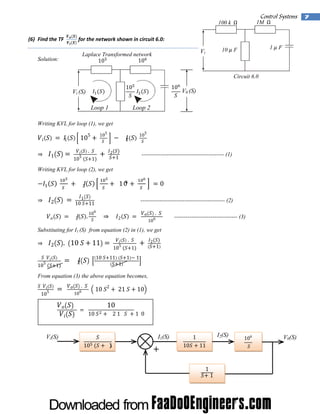
For complicated systems, Block diagram reduction method becomes tedious & time consuming. An
alternate method is that signal flow graphs developed by S.J. Mason. In these graphs, each node represents
a system variable & each branch connected between two nodes acts as Signal Multiplier. The direction of
signal flow is indicated by an arrow.
Definitions:
Node: A node is a point representing a variable.
Transmittance: A transmittance is a gain between two nodes.
Branch: A branch is a line joining two nodes. The signal travels along a branch.
Input node [Source]: It is a node which has only out going signals.
Output node [Sink]: It is a node which is having only incoming signals.
Mixed node: It is a node which has both incoming & outgoing branches (signals).
Path: It is the traversal of connected branches in the direction of branch arrows. Such that no node
is traversed more than once.
8. Loop: It is a closed path.
9. Loop Gain: It is the product of the branch transmittances of a loop.
10. Non-Touching Loops: Loops are Non-Touching, if they do not possess any common node.
11. Forward Path: It is a path from i/p node to the o/p node w hich doesn’t cross any node m ore than
once.
12. Forward Path Gain: It is the product of branch transmittances of a forward path.
1.
2.
3.
4.
5.
6.
7.
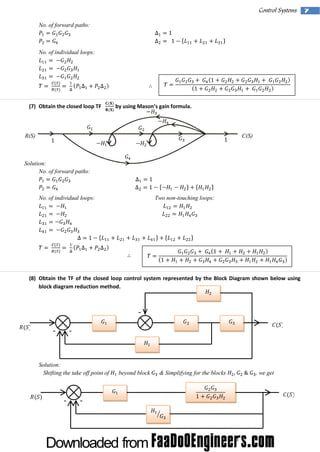
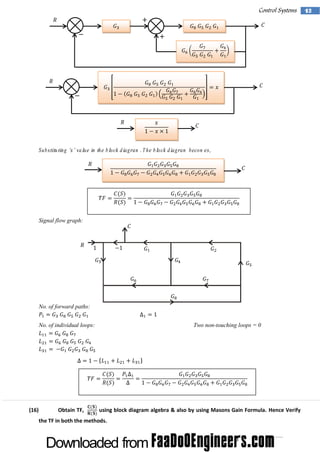
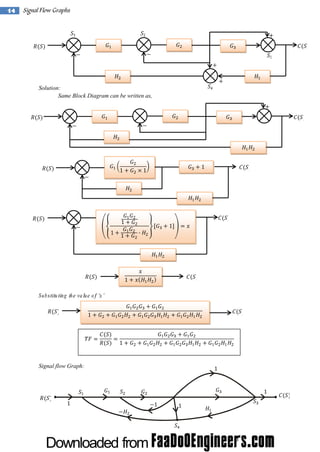
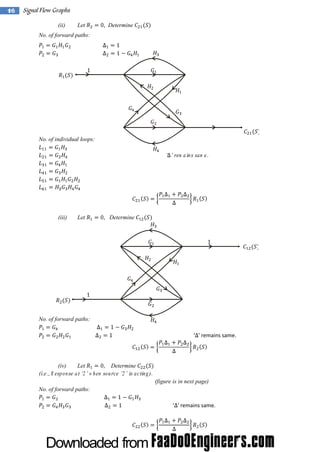
M ASO N ’ GAIN FO RM U LA:
S
The relation between the i/p variable & the o/p variable of a signal flow graphs is given by the net
gain between the i/p & the o/p nodes and is known as Overall gain of the system.
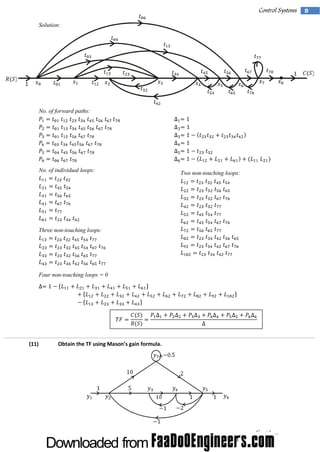
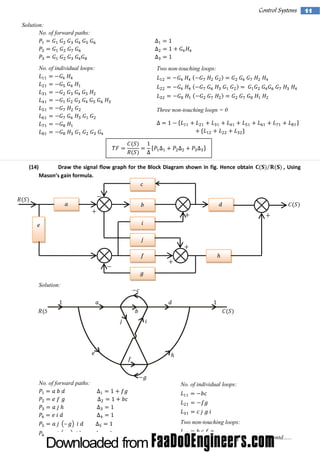
Mason’s gain form ula for the determ ination of overall system gain is given by,
Where,
–
Path gain of
forward path.
Determinant of the graph.
The value of the
T
for that part of the graph not touching the
Overall gain of the system.
forward path.
1](https://image.slidesharecdn.com/someimportanttipsforcontrol-systems-131123003551-phpapp01/85/Some-important-tips-for-control-systems-21-320.jpg)
















![Control Systems 1
Root Locus Plots
By: Sheshadri.G.S.
CIT, Gubbi.
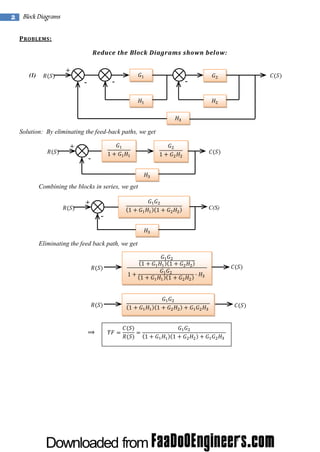
It gives complete dynamic response of the system. It provides a measure of sensitivity of roots to the
variation in the parameter being considered. It is applied for single as well as multiple loop system. It can be defined as
follows,
It is the plot of the loci of the root of the complementary equation when one or more parameters of the open-loop
Transfer function are varied, mostly the only one variable available is the gain ‘K’ The negative gain has no physical
significance hence varying ‘K’ from ‘0’ to ‘∞’ , the plot is obtained called the “Root Locus Point”.
Rules for the Construction of Root Locus
(1) The root locus is symmetrical about the real axis.
(2) The no. of branches terminating on ‘∞’ equals the no. of open-loop pole-zeroes.
(3) Each branch of the root locus originates from an open-loop pole at ‘K = 0’ & terminates at open-loop zero
corresponding to ‘K = ∞’.
(4) A point on the real axis lies on the locus, if the no. of open-loop poles & zeroes on the real axis to the right of this
point is odd.
(5) The root locus branches that tend to ‘∞’, do so along the straight line.
180
Asymptotes making angle with the real axis is given by
P = No. of poles
&
0
,
Where, n=1,3,5,…………………
Z =No. of zeroes.
i.e.,
(6) The asymptotes cross the real axis at a point known as Centroid.
∑
∑
(7) The break away or the break in points [Saddle points] of the root locus or determined from the roots of the
equation
0.
(8) The intersection of the root locus branches with the imaginary axis can be determined by the use of RouthHurwitz criteria or by putting ‘ ’ in the characteristic equation & equating the real part and imaginary to
zero. To solve for ‘ ’ & ‘K’ i.e., the value of ‘ ’ is intersection point on the imaginary axis & ‘K’ is the value of
gain at the intersection point.
180
(9) The angle of departure from a complex open-loop pole( ) is given by,](https://image.slidesharecdn.com/someimportanttipsforcontrol-systems-131123003551-phpapp01/85/Some-important-tips-for-control-systems-49-320.jpg)







This document provides notes on control systems for a Bachelor of Engineering degree. It includes: 1. An introduction to control systems, defining key terms like controlled variable, controller, plant, disturbance, feedback control, and open-loop and closed-loop systems. 2. A classification of control systems based on their method of analysis and design, type of signal, system components, and main purpose. 3. An overview of mathematical models of linear systems, including analogous electrical systems, translational and rotational mechanical systems, and D'Alembert's principle. 4. An introduction to transfer functions, including their features and how to obtain them from system equations by taking the Laplace transform.