biocontrolsystemslecture1SYSTEMS & THEIR REPRESENTATIONS.pptx
Biocontrol System is a mean by which any biological quantity of interest in a machine or mechanism is maintained or altered in accordance with desired manner [1].
A system which controls the output quantity is called a control system.
Content
Introduction
Basicterminologies
Classifications of Control Systems
Basic elements of Control Systems
Examples of Biocontrol Systems
3.
Introduction
• Biocontrol Systemis a mean by which any biological quantity of
interest in a machine or mechanism is maintained or altered in
accordance with desired manner [1].
• A system which controls the output quantity is called a control
system.
• A control system may be operated by electricity, by mechanical
means, by fluid pressure (liquid or gas), or by a combination of
means.
• When a computer is involved in the control circuit, it is usually
more convenient to operate all of the control systems
electrically, although intermixtures are fairly common.
4.
Basic Terminologies
ControlledVariable:It is the quantity or condition that is
measured & controlled
Controller: means measuring the value of the controlled
variable of the system & applying the manipulated variable to
the system to correct or to limit the deviation of the
measured value to the desired value [2].
Plant: A plant is a piece of equipment, which is a set of
machine parts functioning together.The purpose of which is
to perform a particular operation. Example: Oxygen plant,
Furnace, Space craft etc.
5.
Basic Terminologies
System:A system is a combination of components that works
together & performs certain objective.
Disturbance: A disturbance is a signal that tends to affect the value
of the output of a system. If disturbances created inside the system, it
is called internal while an external disturbance is generated outside
the system.
Feedback Control: It is an operation that, in the presence of
disturbance tends to reduce the difference between the output of a
system & some reference input.
Servo Mechanism: servo mechanism is a feedback controlled
system in which the output is some mechanical position, velocity or
acceleration.
6.
Basic Terminologies
Openloop System: In an Open loop System, the control
action is independent of the desired output. ORWhen the
output quantity of the control system is not fed back to the
input quantity, the control system is called an Open loop
System.
Closed loop System: In the Closed loop Control System
the control action is dependent on the desired output, where
the output quantity is considerably controlled by sending a
command signal to input quantity
7.
Classifications of ControlSystems
The Control System can be classified mainly depending upon;
a) Method of analysis & design; Linear & Non- Linear
Systems.
b) The type of the signal;TimeVarying,Time Invariant,
Continuous data, Discrete data systems etc.
c) The type of system components; Electro Mechanical,
Hydraulic,Thermal, Pneumatic Control systems etc.
d) The main purpose; Position control &Velocity control
Systems.
8.
Linear & Non-Linear Systems
• In a linear system, the principle of superposition can be applied. In
non- linear system, principle of homogeneity
TimeVarying &Time Invariant Systems
• While operating a control system, if the parameters are
unaffected by the time, then the system is calledTime Invariant
Control System.
• Most physical systems have parameters changing with time. If
this variation is measurable during the system operation then
the system is calledTimeVarying System.
• If there is no non-linearity in the time varying system, then the
system may be called as LinearTime varying System.
9.
Discrete Data Systems
•If the signal is not continuously varying with time but it is in
the form of pulses.Then the control system is called Discrete
Data Control System.
• If the signal is in the form of pulse data, then the system is
called Sampled Data Control System.
• Here the information supplied intermittently at specific
instants of time.This has the advantage of Time sharing system.
• On the other hand, if the signal is in the form of digital code,
the system is called Digital Coded System.
• Here use of Digital computers, µp, µc is made use of such
systems are analyzed by the Z- transform theory.
10.
Continuous Data Systems
•If the signal obtained at various parts of the system are varying
continuously with time, then the system is called Continuous
Data Control Systems.
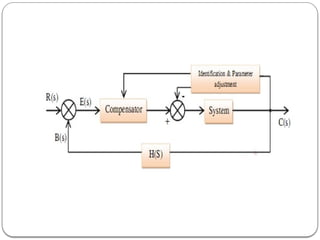
Adaptive Control systems
• In some control systems, certain parameters are either not
constant or vary in an unknown manner.
• If the parameter variations are large or rapid, it may be
desirable to design for the capability of continuously
measuring them & changing the compensation, so that the
system performance criteria can always satisfied.
• This is calledAdaptive Control Systems.
12.
Optimal Control System
•Optimal Control System is obtained by minimizing and/or
maximizing the performance index.This index depends upon
the physical system & skill.
SingleVariable Control System
• In simple control system there will be one input & one output
such systems are called Single variable System (SISO Single
Input & Single Output).
MultiVariable Control System
• In Multivariable control system there will be more than one
input & correspondingly more output - Multiple Inputs &
Multiple Outputs)
13.
Basic Elements ofControl Systems
In recent years, control systems have gained an increasingly
importance in the development and advancement of the
modern civilization and technology.
The basic components of a control system disregarding the
complexity of the system; consists of an input (objective), the
control system and its output (result).
14.
Practically ourday-to-day activities are affected by some
type of control systems.
There are two main branches of control systems:
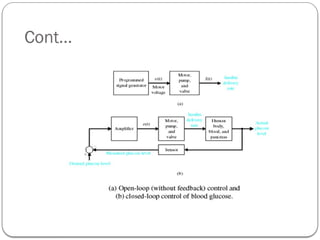
1) Open-loop systems and
2) Closed-loop systems.
15.
Open Loop ControlSystem
The open-loop system is also called the non-feedback system.
This is the simpler of the two systems.A simple example is
illustrated by the speed control of an automobile as shown in
Figure below [3].
In this open-loop system, there is no way to ensure the actual
speed is close to the desired speed automatically.The actual
speed might be way off the desired speed because of the wind
speed and/or road conditions, such as uphill or downhill etc.
16.
Closed Loop ControlSystem
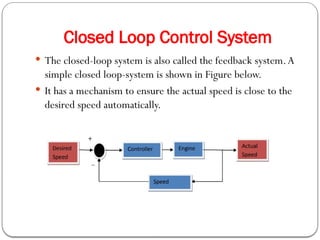
The closed-loop system is also called the feedback system.A
simple closed loop-system is shown in Figure below.
It has a mechanism to ensure the actual speed is close to the
desired speed automatically.
17.
Comparisons of OL& CL Control Systems
Open Loop Control System Closed Loop Control System
• An open loop system has the ability to
perform accurately, if its calibration is
good. If the calibration is not perfect its
performance will go down
• A closed loop system has got the ability
to perform accurately because of the
feed back
• It is easier to build • It is difficult to build
• In general it is more stable as the
feedback is absent
• Less Stable Comparatively
• If non- present; the system operation is
not good
• Even under the presence of non, the
system operation is good.
• Feed back is absent. Example :Traffic
Control System, Control of furnace for
coal heating, an ElectricWashing
Machine
• Feed back is present. Example : Pressure
Control System, Speed Control System,
Robot Control System,Temperature
Control System
18.
Examples of BiocontrolSystems
• Fluid level control system
• Infant incubator temperature control system
• Sterilizer heating systems
• Heat control in the body
Stenberg, JohanA., etal. "When is it biological control?A framework of definitions,
mechanisms, and classifications." Journal of Pest Science 94.3 (2021): 665-676.
Moore, Charles F. "Selection of controlled and manipulated variables." Practical
distillation control (1992): 140-177.
Antsaklis, Panos J. "Fundamental Characteristics of Feedback
Mechanisms." ISIS (2011): 005.

![Introduction
• Biocontrol System is a mean by which any biological quantity of
interest in a machine or mechanism is maintained or altered in
accordance with desired manner [1].
• A system which controls the output quantity is called a control
system.
• A control system may be operated by electricity, by mechanical
means, by fluid pressure (liquid or gas), or by a combination of
means.
• When a computer is involved in the control circuit, it is usually
more convenient to operate all of the control systems
electrically, although intermixtures are fairly common.](https://image.slidesharecdn.com/biocontrolsystemslecture1systemstheirrepresentations-250515080409-b6bde0f2/85/biocontrolsystemslecture1SYSTEMS-THEIR-REPRESENTATIONS-pptx-3-320.jpg)
![Basic Terminologies
ControlledVariable: It is the quantity or condition that is
measured & controlled
Controller: means measuring the value of the controlled
variable of the system & applying the manipulated variable to
the system to correct or to limit the deviation of the
measured value to the desired value [2].
Plant: A plant is a piece of equipment, which is a set of
machine parts functioning together.The purpose of which is
to perform a particular operation. Example: Oxygen plant,
Furnace, Space craft etc.](https://image.slidesharecdn.com/biocontrolsystemslecture1systemstheirrepresentations-250515080409-b6bde0f2/85/biocontrolsystemslecture1SYSTEMS-THEIR-REPRESENTATIONS-pptx-4-320.jpg)
![Open Loop Control System
The open-loop system is also called the non-feedback system.
This is the simpler of the two systems.A simple example is
illustrated by the speed control of an automobile as shown in
Figure below [3].
In this open-loop system, there is no way to ensure the actual
speed is close to the desired speed automatically.The actual
speed might be way off the desired speed because of the wind
speed and/or road conditions, such as uphill or downhill etc.](https://image.slidesharecdn.com/biocontrolsystemslecture1systemstheirrepresentations-250515080409-b6bde0f2/85/biocontrolsystemslecture1SYSTEMS-THEIR-REPRESENTATIONS-pptx-15-320.jpg)