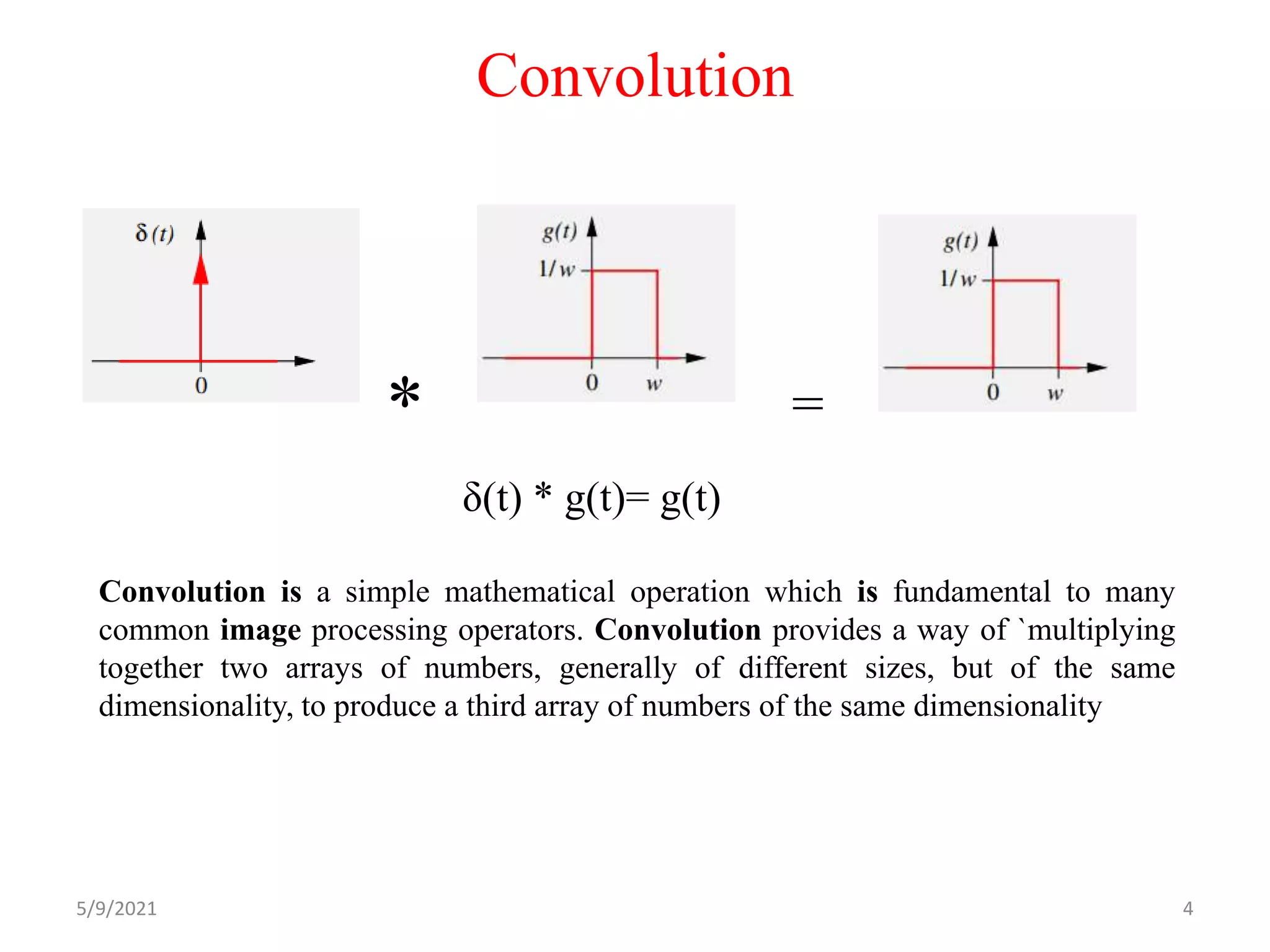
The document discusses convolution, which is a mathematical operation used in signal and image processing. Convolution provides a way to multiply two arrays of numbers to produce a third array. It defines convolution as an integral that calculates the output of a linear time-invariant system by integrating the product of the input and impulse response functions. The key properties of convolution are that it is commutative, distributive, and associative. Examples are provided to demonstrate calculating the convolution of different signals.
![• The impulse response is denoted as:
h(t)=T[δ(t)]
We know that any arbitrary signal x(t) can be represented as:
The system output is given by : y(t)=T[x(t)]
• y(t)= T[ ]
For linear system
• y(t) = −∞
∞
𝑥(τ)𝑇[δ(𝑡 − τ)]dτ------(1)
5/9/2021 8](https://image.slidesharecdn.com/vbm-slideshare-210509121846/75/Convolution-8-2048.jpg)
![• If the response of the system due to impulse δ(t) is h(t), then the
response of the system due to delayed impulse is
h(t,τ)=T[δ(t-τ)]
put this value in equation 1
y(t) = −∞
∞
𝑥(τ)ℎ(𝑡, τ)dτ----------(2)
For a time invariant system, the output due to delayed by τ sec
is equal to the output delayed by τ sec. i.e.
h(t,τ)=h(t-τ)
Time invariant----shifting
Put this value in equation (2)
y(t) = −∞
∞
𝑥(τ)ℎ(𝑡 − τ)dτ
This is called convolution integral or simply convolution.
The convolution of two signals x(t) and h(t) can be represented as
y(t)= x(t) * h(t)
5/9/2021 9](https://image.slidesharecdn.com/vbm-slideshare-210509121846/75/Convolution-9-2048.jpg)
![Response of linear system
• In General , the lower limit and upper limit of integration in the
convolution integral depend on whether the signal x(t) and the impulse
response h(t) are causal or not.
1] If a noncausal signal is applied to a noncausal system
y(t) = −∞
∞
𝑥(τ)ℎ(𝑡 − τ)dτ if both x(t) and h(t) are noncausal
2] If a noncausal signal is applied to a causal system
y(t) = −∞
𝑡
𝑥(τ)ℎ(𝑡 − τ)dτ if x(t) is non causal and h(t)is causal
3]If a causal signal is applied to a noncausal system
y(t) = 0
∞
𝑥(τ)ℎ(𝑡 − τ)dτ if x(t) is causal and h(t)is non causal
4]If a causal signal is applied to a causal system
y(t) = 0
𝑡
𝑥(τ)ℎ(𝑡 − τ)dτ if both x(t) is causal and h(t) are causal
5/9/2021 10
signals and systems by A. Ananad Kumar](https://image.slidesharecdn.com/vbm-slideshare-210509121846/75/Convolution-10-2048.jpg)
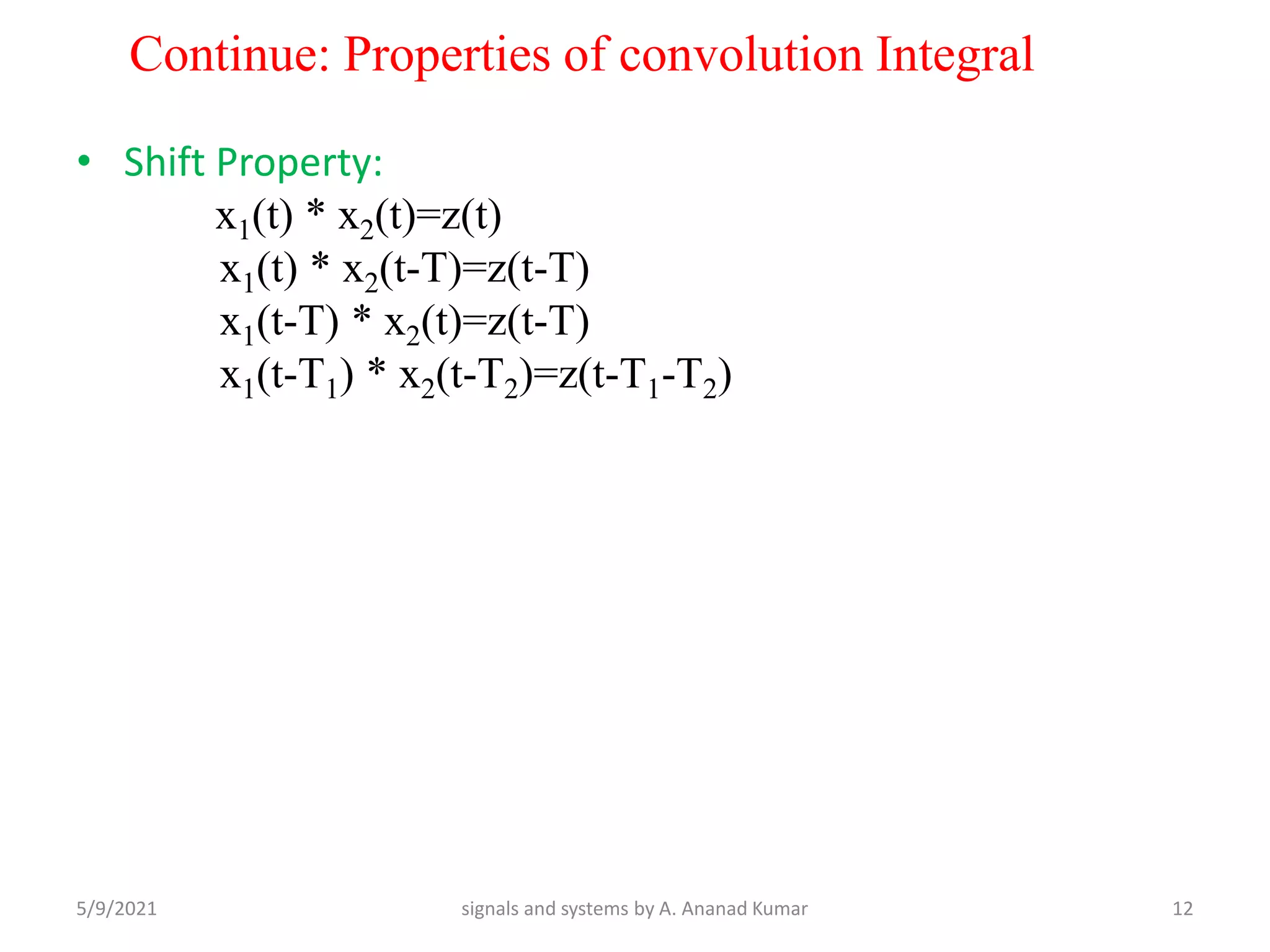
![Properties of convolution Integral
• Let us consider two signals x1(t) and x2(t). The convolution of two
signals x1(t) and x2(t) is given by
x1(t) * x2(t)= −∞
∞
𝑥1(τ)𝑥2(𝑡 − τ)dτ
= −∞
∞
𝑥2(τ)𝑥1(𝑡 − τ)dτ
The properties of convolution are as follows:
Commutative property:
x1(t) * x2(t)= x2(t) * x1(t)
Distributive property:
x1(t) * [x2(t)+x3(t)]= [x1(t) * x2(t)]+[x2(t) * x3(t)]
Associative property:
x1(t) * [x2(t)*x3(t)]= [x1(t) * x2(t)]*x3(t)
5/9/2021 11
signals and systems by A. Ananad Kumar](https://image.slidesharecdn.com/vbm-slideshare-210509121846/75/Convolution-11-2048.jpg)
![Find the convolution of the following signals
1] x1(t)=e-2tu(t) ; x2(t)=e-4tu(t)
2] x1(t)=tu(t) ; x2(t)=tu(t)
5/9/2021 13](https://image.slidesharecdn.com/vbm-slideshare-210509121846/75/Convolution-13-2048.jpg)
![1] x1(t)=e-2tu(t) ; x2(t)=e-4tu(t)
We know that
x1(t) * x2(t)= −∞
∞
𝑥1(τ)𝑥2(𝑡 − τ)dτ
Put t=τ
Put the value of x1(τ) and x2(t-τ) in above
equation
= −∞
∞
e−2τu(τ) e-4(t-τ)u(t-τ) dτ
5/9/2021 14](https://image.slidesharecdn.com/vbm-slideshare-210509121846/75/Convolution-14-2048.jpg)
![Continue
Unit step u(τ)=1 for τ>0
u(t-τ)=1 for t-τ≥0 or τ<0
Hence u(τ) u(t-τ)=1 for 0 < τ <t
For all other values of u(τ ) u(t-τ)=0
x1(t) * x2(t) = 0
𝑡
e−2τ e-4(t-τ) dτ
= 0
𝑡
e−2τ e-4t e4τ dτ
= e-4t
0
𝑡
e2τ dτ
= e-4t [ e2τ /2]
= e-4t /2 [ e2t -1] fort≥0
= [ e-2t - e-4t ] /2
5/9/2021 15](https://image.slidesharecdn.com/vbm-slideshare-210509121846/75/Convolution-15-2048.jpg)
![3] x1(t)=cost u(t) ; x2(t)=u(t)
We know that
x1(t) * x2(t)= −∞
∞
𝑥1(τ)𝑥2(𝑡 − τ)dτ
Put t=τ
Put the value of x1(τ) and x2(t-τ) in above
equation
x1(t) * x2(t)= −∞
∞
𝑐𝑜𝑠τ , 𝑢 τ 𝑢(𝑡 − τ)dτ
5/9/2021 16](https://image.slidesharecdn.com/vbm-slideshare-210509121846/75/Convolution-16-2048.jpg)
![Continue
• Hence u(τ) u(t-τ)=1 for 0 < τ <t
=0 Otherwise
x1(t) * x2(t)= 0
𝑡
𝑐𝑜𝑠τdτ
= [ sinτ]0
t
= sint-sin0
= sint for t≥0
5/9/2021 17](https://image.slidesharecdn.com/vbm-slideshare-210509121846/75/Convolution-17-2048.jpg)
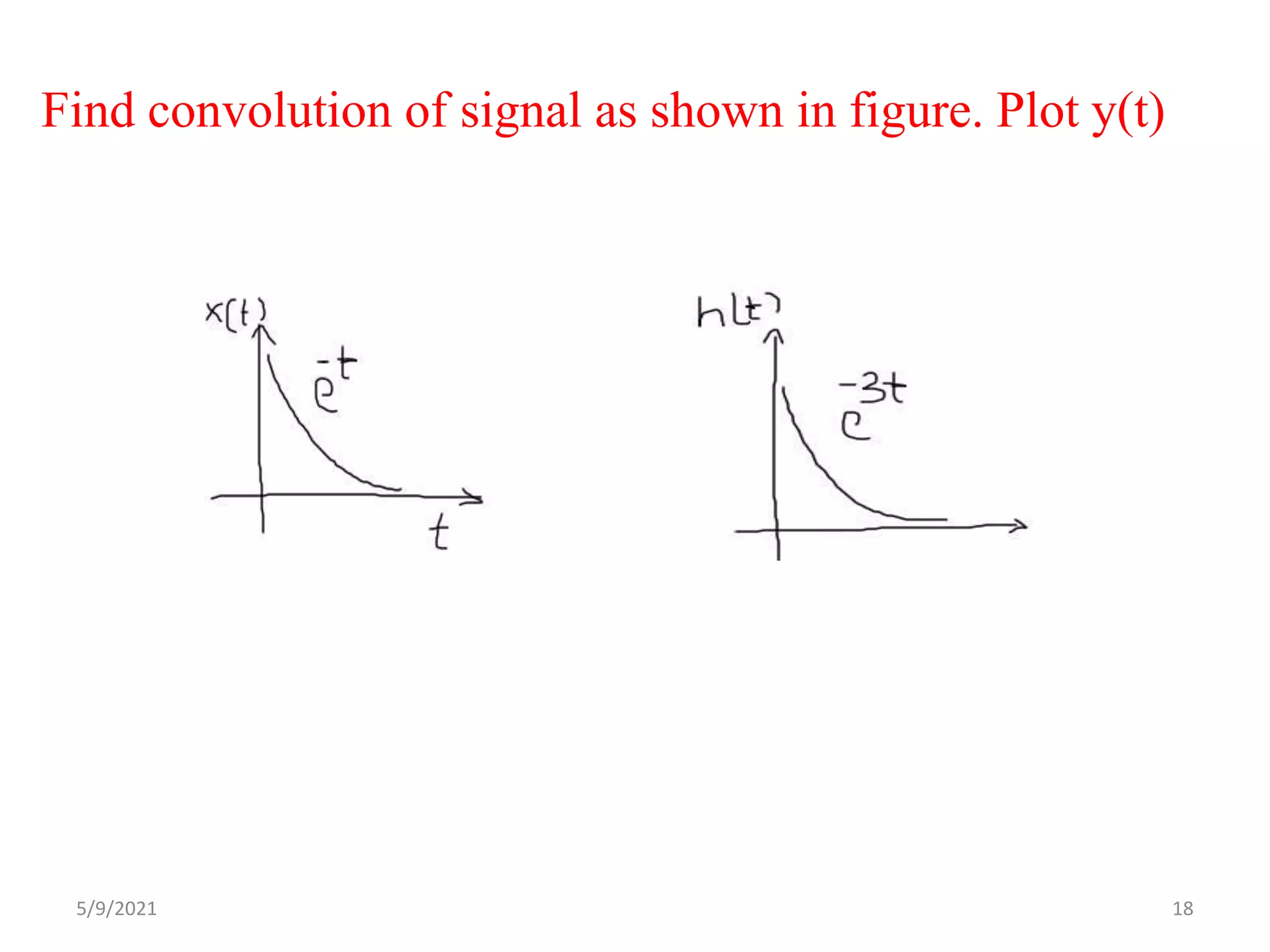
![• Case2: When t>0
• This condition shown in figure
• Y(t)= 0
𝑡
e−τ e-3(-τ+t) dτ = e-3t/2 [ e-2t -1 ]
5/9/2021 20](https://image.slidesharecdn.com/vbm-slideshare-210509121846/75/Convolution-20-2048.jpg)