Downloaded 1,422 times
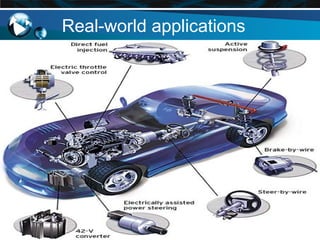

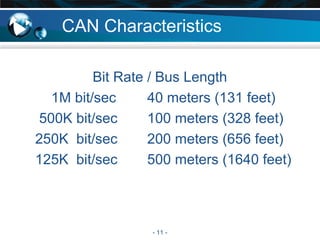
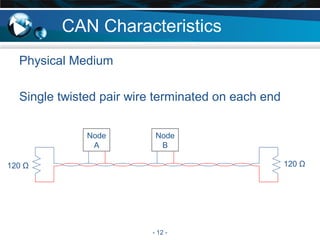


The document discusses the CAN bus protocol. It provides an introduction that describes CAN as a multi-master, broadcasting, serial communication protocol for reliable data exchange between electronic control units. It then discusses CAN applications in automotive, industrial, medical and other fields. The document outlines CAN characteristics such as message prioritization, arbitration, data protection methods, and advantages like reliability and robustness in noisy environments. It concludes that CAN is well-suited for applications requiring many short messages with high reliability.






















































































