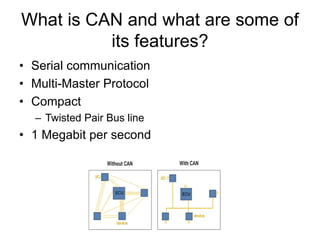
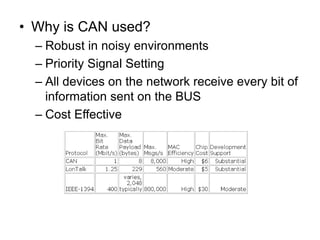
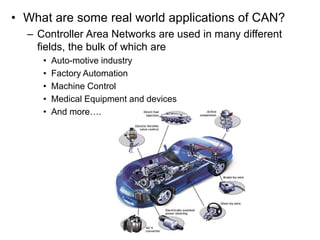
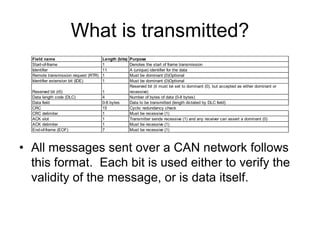
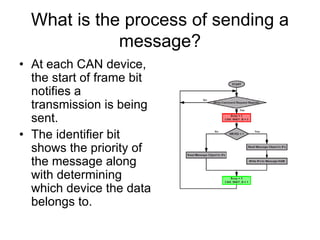
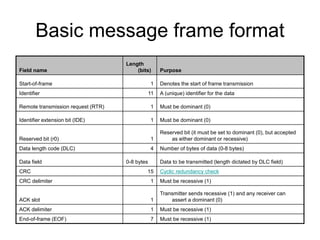
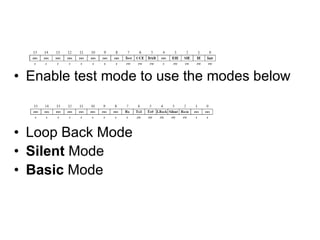
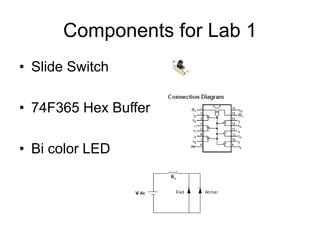
The document provides an introduction to Controller Area Network (CAN), outlining its features such as serial communication, multi-master protocol, and robustness in noisy environments. It details the message transmission format and includes applications in fields like automotive, factory automation, and medical equipment. Additionally, the document explains the process of sending messages, message object configuration, and debugging tools for CAN systems.