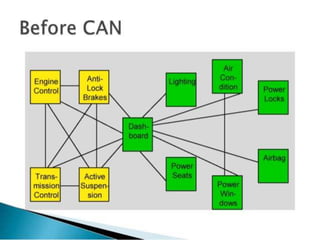
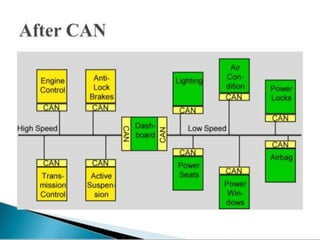
The CAN protocol was developed by Bosch to address automotive network requirements and reduce vehicle wiring costs. It is a message-based serial communication protocol that supports real-time systems with high reliability. CAN messages have a variable length identifier field and data field. The protocol provides fault-tolerant transmission through error detection and message prioritization through arbitration of conflicting messages based on the identifier. CAN is well-suited for applications requiring consistent data sharing between distributed systems like automotive and industrial equipment networks.