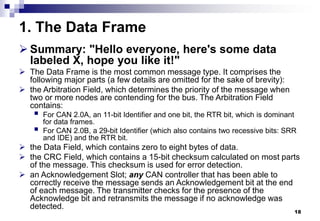
Control Area Network (CAN) Bus
The CAN bus was developed to allow electronic devices in vehicles to communicate over a serial bus, replacing point-to-point wiring. CAN specifies physical, protocol, and message filtering layers. It uses differential signaling over a twisted pair wire to broadcast messages prioritized by identifier. Higher layer protocols provide functions like addressing, error handling, and message layout. The CAN standard defines four message types: data frames, remote frames, error frames, and overload frames.