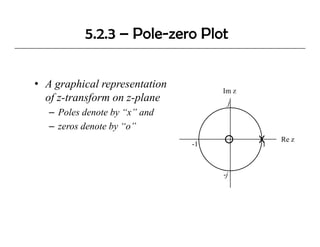
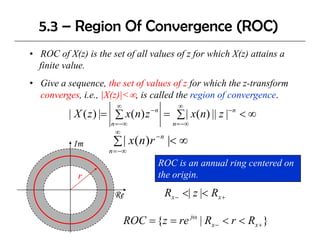
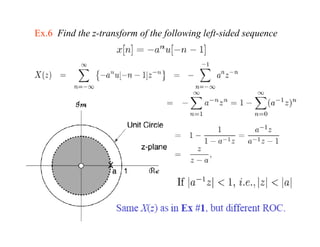
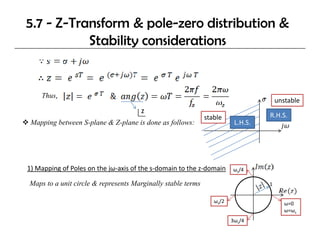
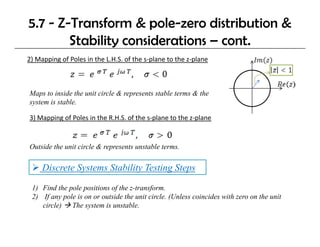
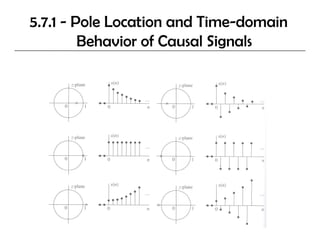
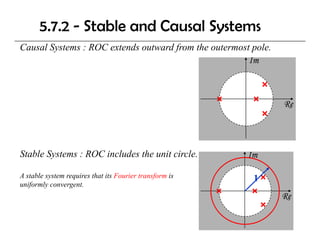
This document discusses the z-transform, which is a tool for analyzing discrete-time signals and systems analogous to the Laplace transform for continuous-time signals. It defines the z-transform, describes its region of convergence and pole-zero plot, lists some common z-transform pairs, and discusses how the location of poles and zeros in the z-plane relates to the stability of a system. Examples are provided to illustrate key concepts like finding the z-transform of sequences and determining the region of convergence.

![Ex. 1 Find the z-transform of the following sequence
x = {2 -3, 7 4 0 0 ……..}
{2, 3 7, 4, 0, 0, }
∞
X ( z) = ∑ x[n]z − n = 2 − 3 z −1 + 7 z − 2 + 4 z −3
n = −∞
2 z 3 − 3z 2 + 7 z + 4
= , |z|>0
z 3
The ROC is the entire complex z - plane except the origin.
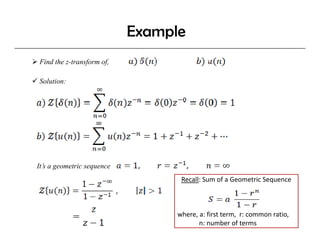
Ex. 2 Find the z-transform of δ [n]
∞
X ( z) = ∑ δ [ n] z − n = 1
n = −∞
with an ROC consisting of the entire z - plane.](https://image.slidesharecdn.com/dsp-u-lec05thez-transform-100105085537-phpapp01/85/Dsp-U-Lec05-The-Z-Transform-9-320.jpg)
![Ex 3 Find the z transform of δ [n -1]
Ex. z-transform 1]
∞
1
X ( z) =
n = −∞
∑ δ [n − 1] z − n = z −1 =
z
with an ROC consisting of the entire z - plane except z = 0 .
Ex. 4 Find the z-transform of δ [n +1]
∞
X ( z) = ∑ δ [n + 1] z − n = z
n = −∞
with an ROC consisting of the entire z - plane except z = ∞,
i.e., there is a pole at infinity.](https://image.slidesharecdn.com/dsp-u-lec05thez-transform-100105085537-phpapp01/85/Dsp-U-Lec05-The-Z-Transform-10-320.jpg)
![Ex.5 Find the z-transform of the following right-sided sequence
(causal)
x [ n] = a u [ n]
n
∞ ∞
−n
X ( z ) = ∑ a u[n]z
n
= ∑ (az −1 ) n
n = −∞ n =0
This f
Thi form to find inverse
fi d i
ZT using PFE](https://image.slidesharecdn.com/dsp-u-lec05thez-transform-100105085537-phpapp01/85/Dsp-U-Lec05-The-Z-Transform-11-320.jpg)
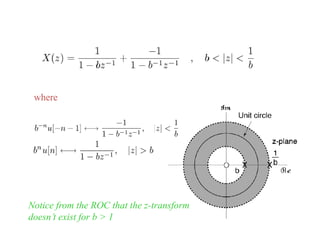
![Ex. 7 Find the z-transform of
Rewriting x[n] as a sum of left-sided and right sided sequences
left sided right-sided
and finding the corresponding z-transforms,](https://image.slidesharecdn.com/dsp-u-lec05thez-transform-100105085537-phpapp01/85/Dsp-U-Lec05-The-Z-Transform-13-320.jpg)
![5.4 - Properties of z-Transform
(1) Linearity : a x[n] + b y[n] ←→ a X ( z ) + b Y ( z )
⎛z⎞
(4) Z - scale Property : a x[n] ←→ X ⎜ ⎟
n
⎝a⎠
1
(5) Time Reversal : x [−n] ←→ X ( )
l
z
(6) Convolution : h [n] ∗ x [n] ←→ H ( z ) X ( z )
Transfer
Function](https://image.slidesharecdn.com/dsp-u-lec05thez-transform-100105085537-phpapp01/85/Dsp-U-Lec05-The-Z-Transform-17-320.jpg)
![5.6 - Commonly used z-Transform pairs
Sequence z‐Transform ROC
δ[n] 1 All values of z
All values of z
u[n] 1 |z| > 1
1 − z −1
1
αnu[n] |z| > |α|
1 − αz −1
αz −1
nαnu[n] (1 − αz −1 ) 2 |z| > |α|
|z| > |α|
1
(n+1) αnu[n] |z| > |α|
(1 − αz −1 ) 2
1 − (r cos ω0 ) z −1
(rn cos ω on) u[n] |z| > |r|
1 − (2r cos ω0 ) z −1 + r 2 z −2
1 − (r sin ω0 ) z −1
(rn sin ωon) [n] |z| > |r|
1 − (2r cos ω0 ) z −1 + r 2 z −2](https://image.slidesharecdn.com/dsp-u-lec05thez-transform-100105085537-phpapp01/85/Dsp-U-Lec05-The-Z-Transform-19-320.jpg)


![Digital Signal Processing[ECEG-3171]-Ch1_L02](https://cdn.slidesharecdn.com/ss_thumbnails/dspl2-180427094423-thumbnail.jpg?width=640&height=640&fit=bounds)




![Digital Signal Processing[ECEG-3171]-Ch1_L03](https://cdn.slidesharecdn.com/ss_thumbnails/dspl3-180427094423-thumbnail.jpg?width=640&height=640&fit=bounds)