Downloaded 97 times

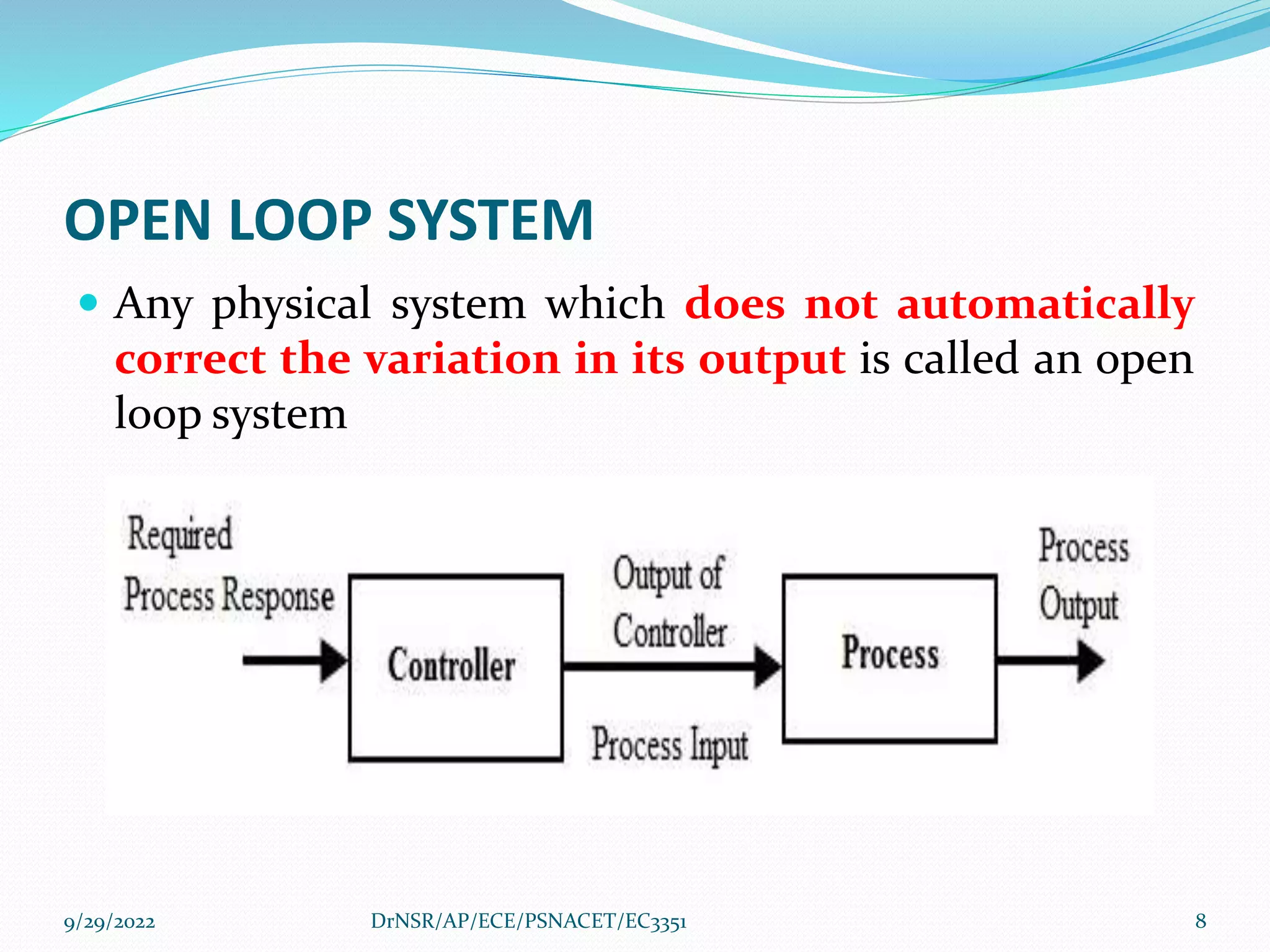

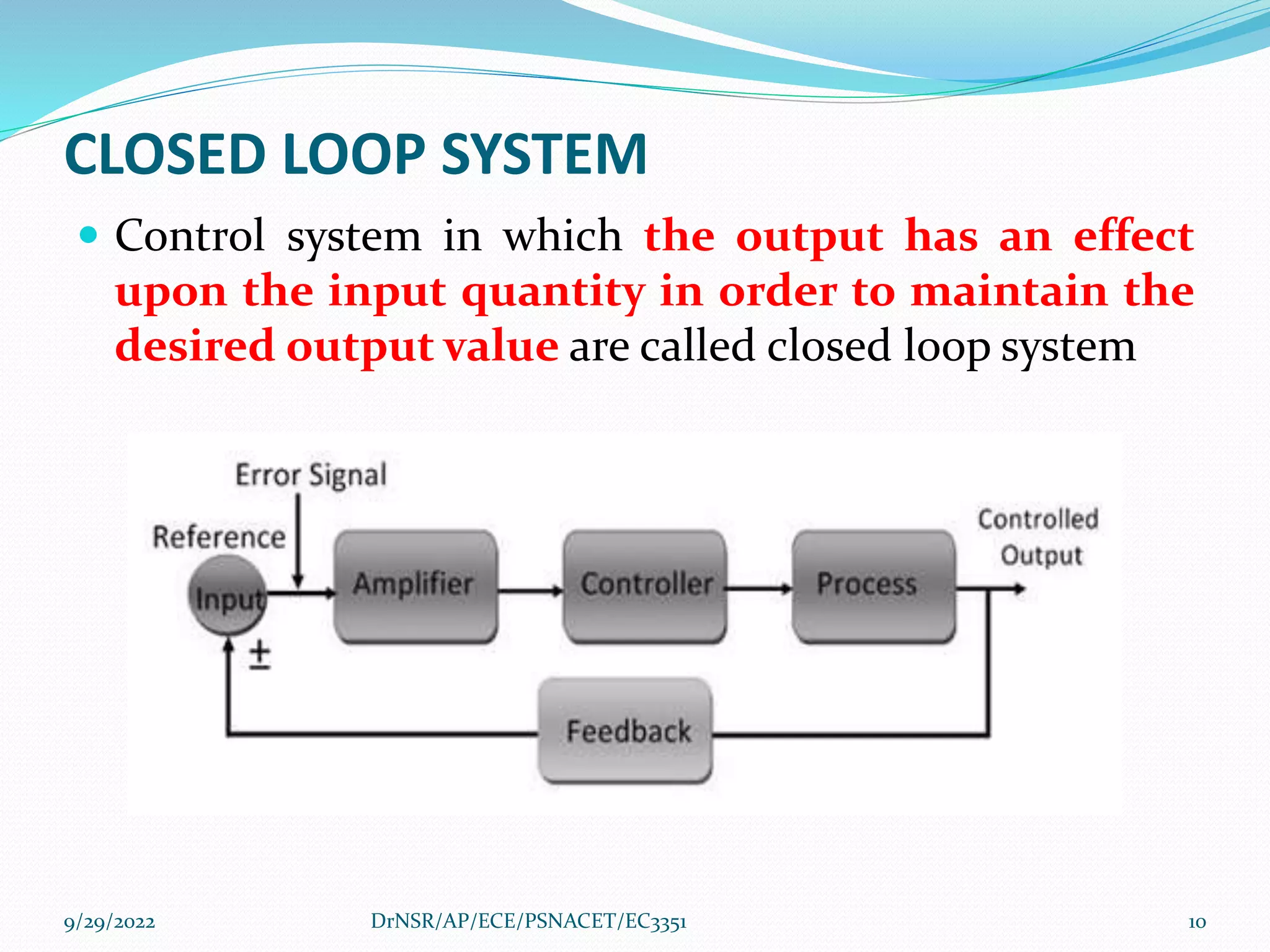


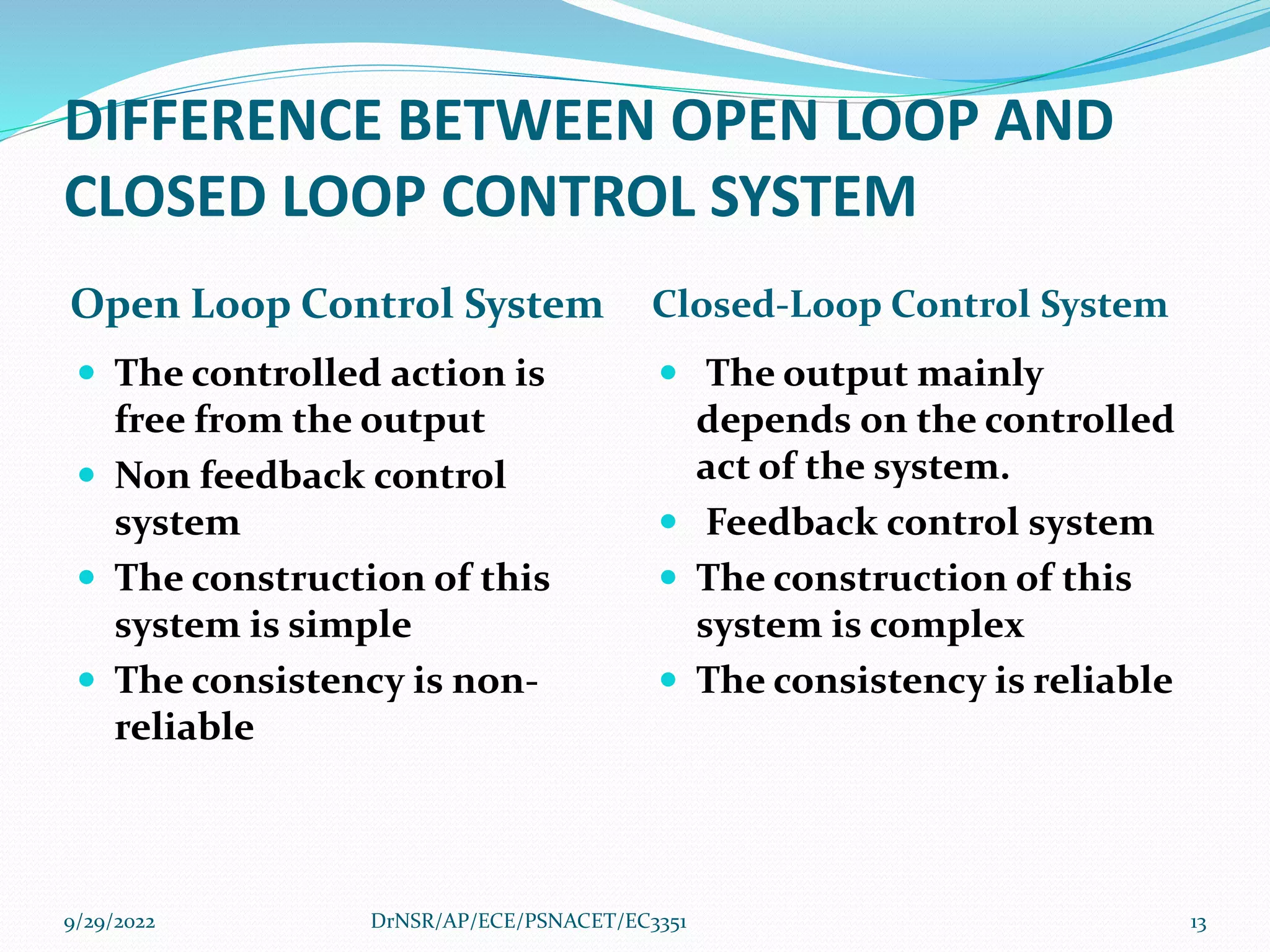
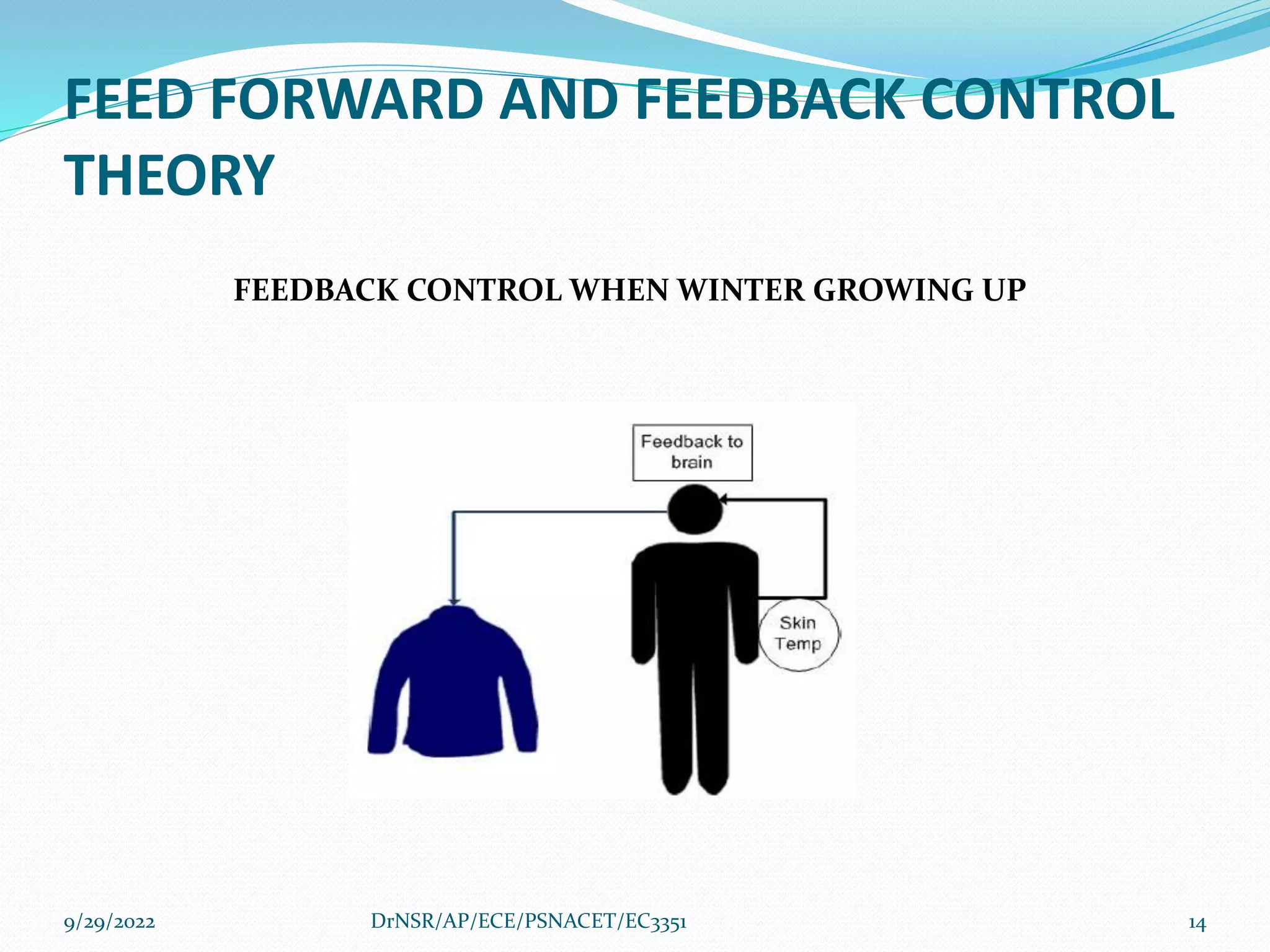

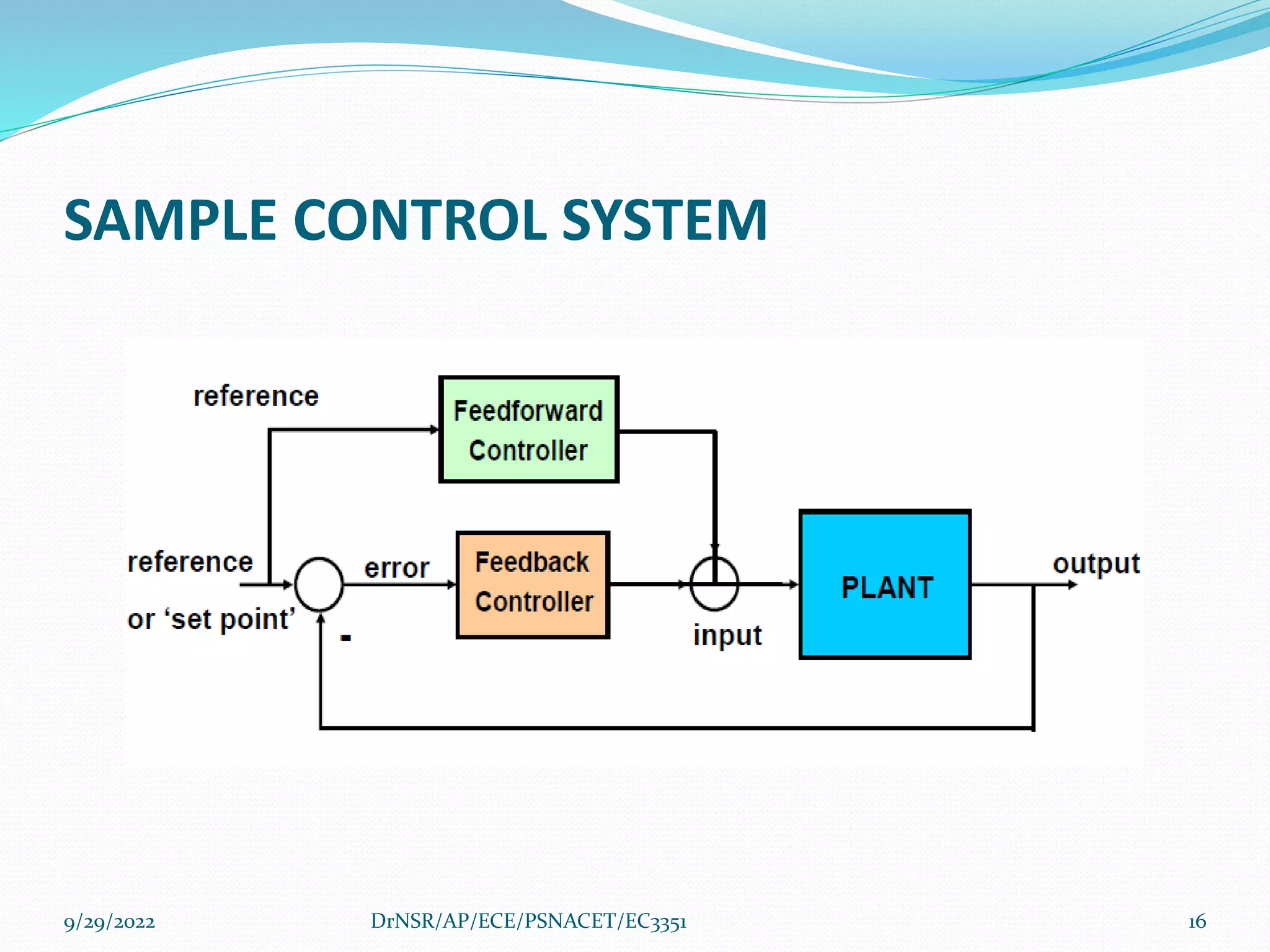
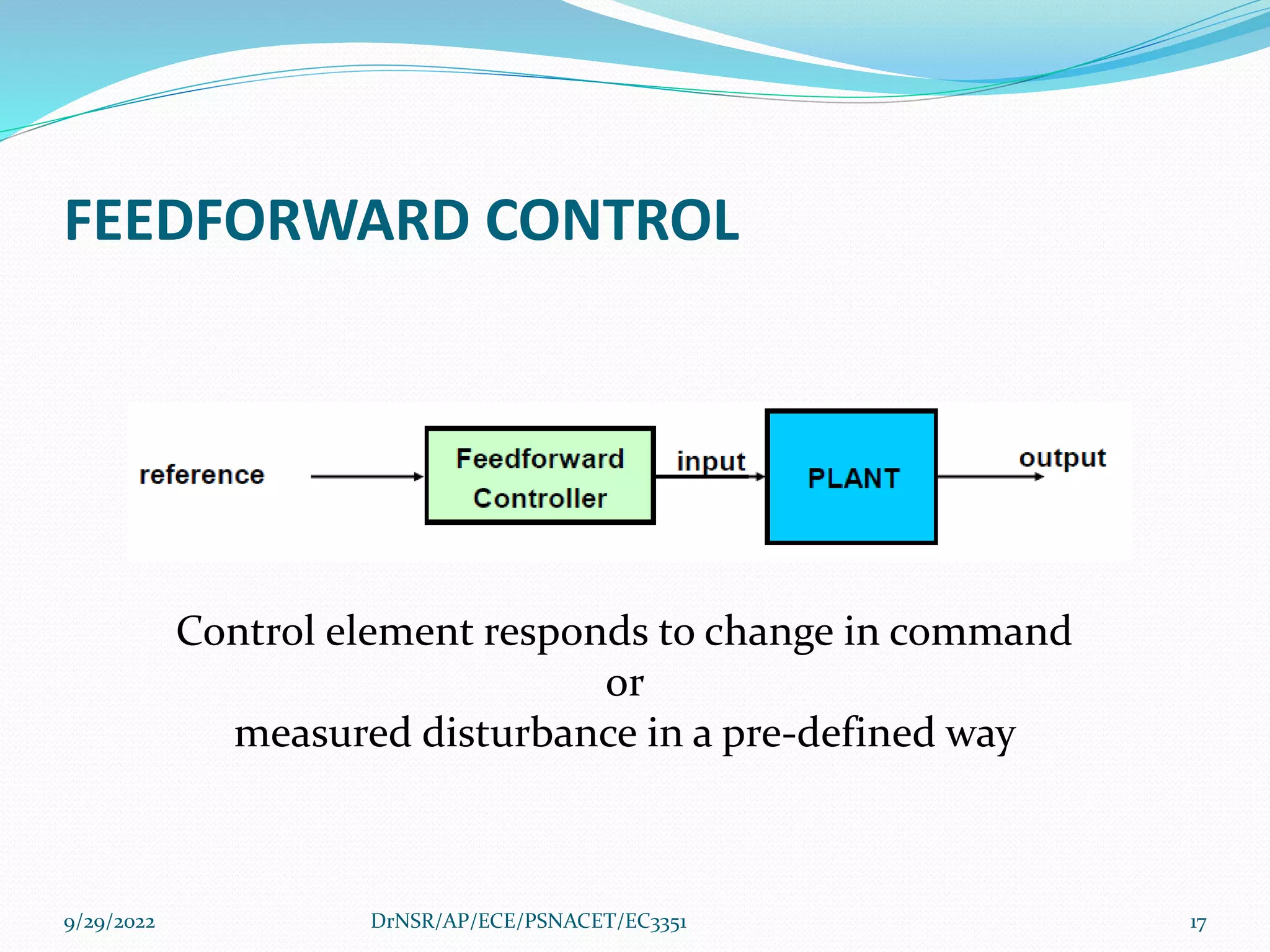


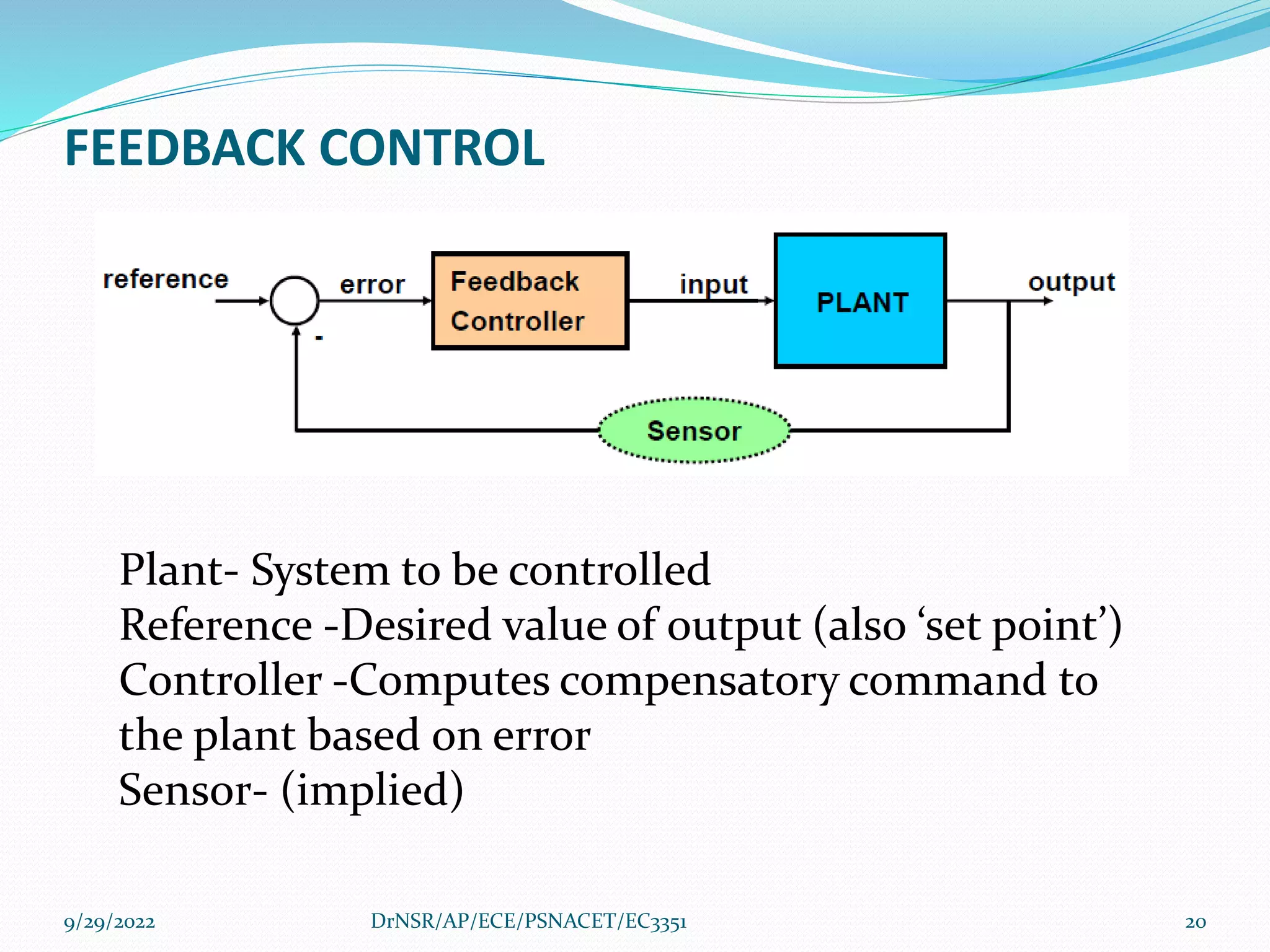
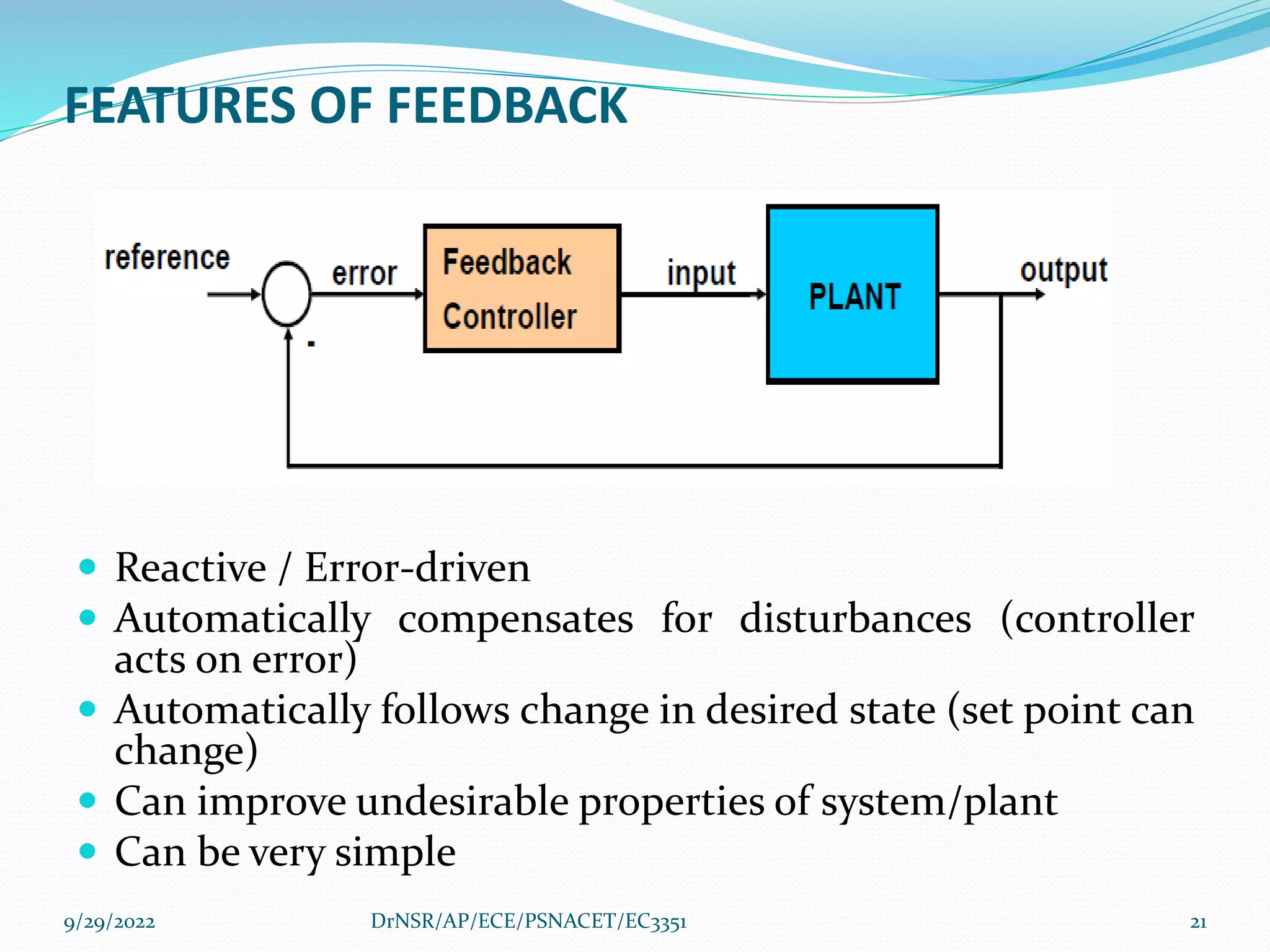






















































































































The document outlines the course objectives and units for a control systems course. The course aims to introduce control system components and their representations, and analyze systems using time response, frequency response, stability, and state variables. Unit 1 covers system components and models, including electrical and mechanical transfer functions, block diagrams, signal flow graphs, and multivariable systems. It also defines open and closed loop systems and describes feedforward and feedback control theory.