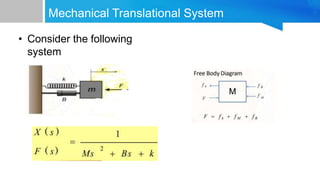
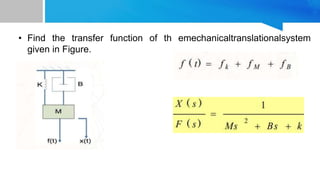
1. Translational mechanical systems consist of three basic elements: mass, spring, and dashpot. The transfer function is obtained by drawing a free-body diagram, writing Newton's law as a differential equation, and taking the Laplace transform.
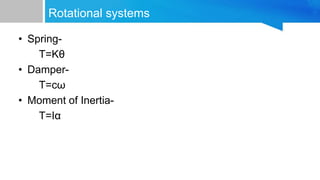
2. Rotational mechanical systems also consist of three basic elements: moment of inertia, torsional spring, and dashpot. The transfer function is obtained similarly using torque and angular relationships.
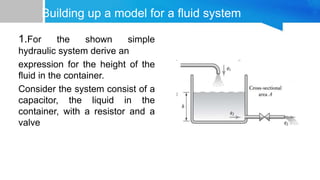
3. Mathematical models of systems include differential equation models, transfer function models, and state-space models. Examples are shown for RLC circuits and fluid systems.




















































































![ceramic-art-and-pottery [Autosaved].pptx](https://cdn.slidesharecdn.com/ss_thumbnails/ceramic-art-and-potteryautosaved-260113113456-35c55ddb-thumbnail.jpg?width=640&height=640&fit=bounds)



