Downloaded 10 times

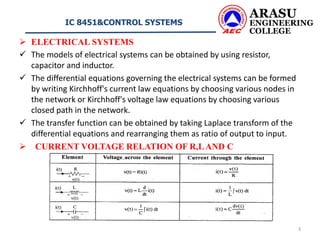
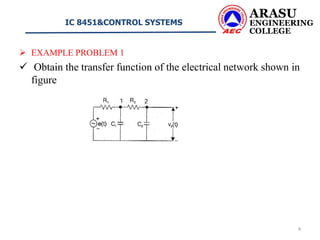
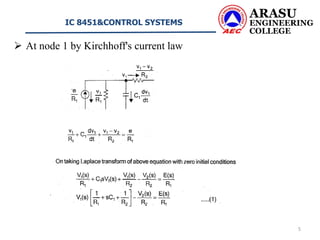


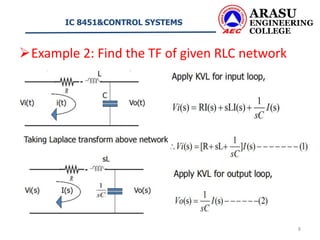
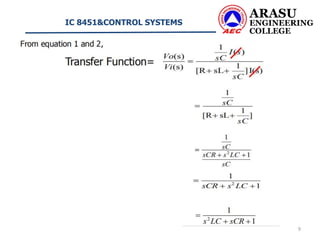
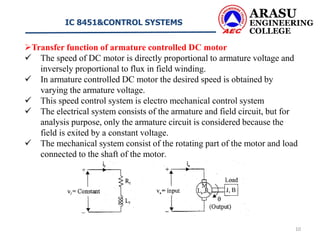
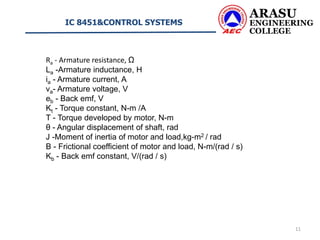
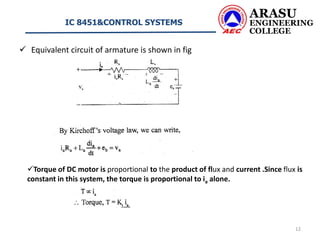
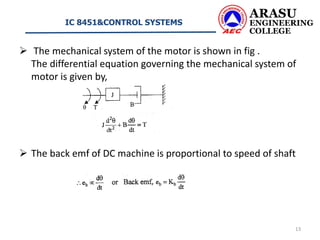




This document is from Arasu Engineering College and discusses control systems and electrical circuits. It provides examples of obtaining transfer functions from RLC circuits using Kirchhoff's laws. It also discusses the transfer function of an armature controlled DC motor. The motor transfer function is derived by writing the differential equations for the electrical and mechanical systems and relating the armature current to torque, back emf to speed, and equating the electrical and mechanical equations. The final transfer function is obtained by substituting the equations and simplifying.