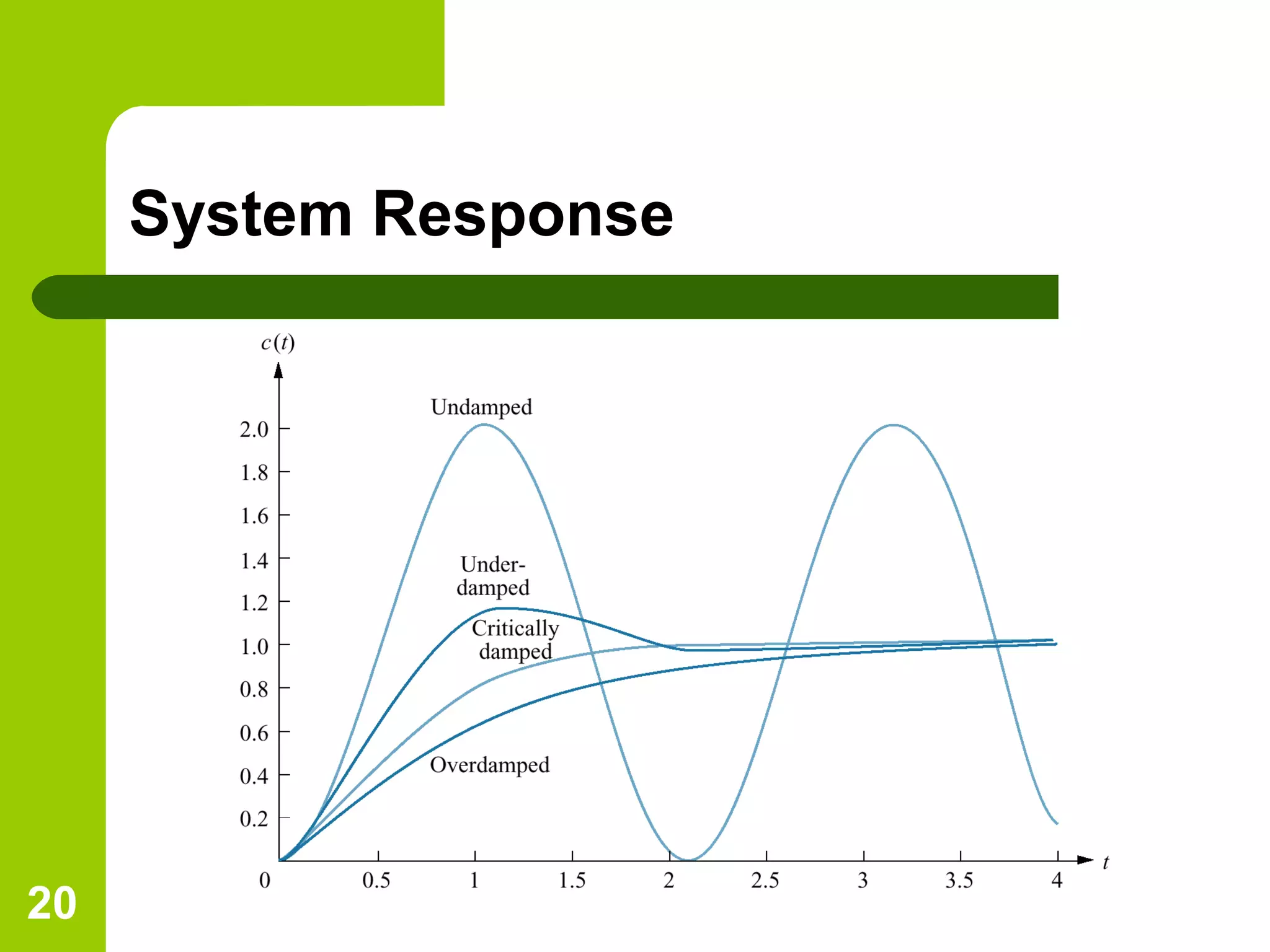
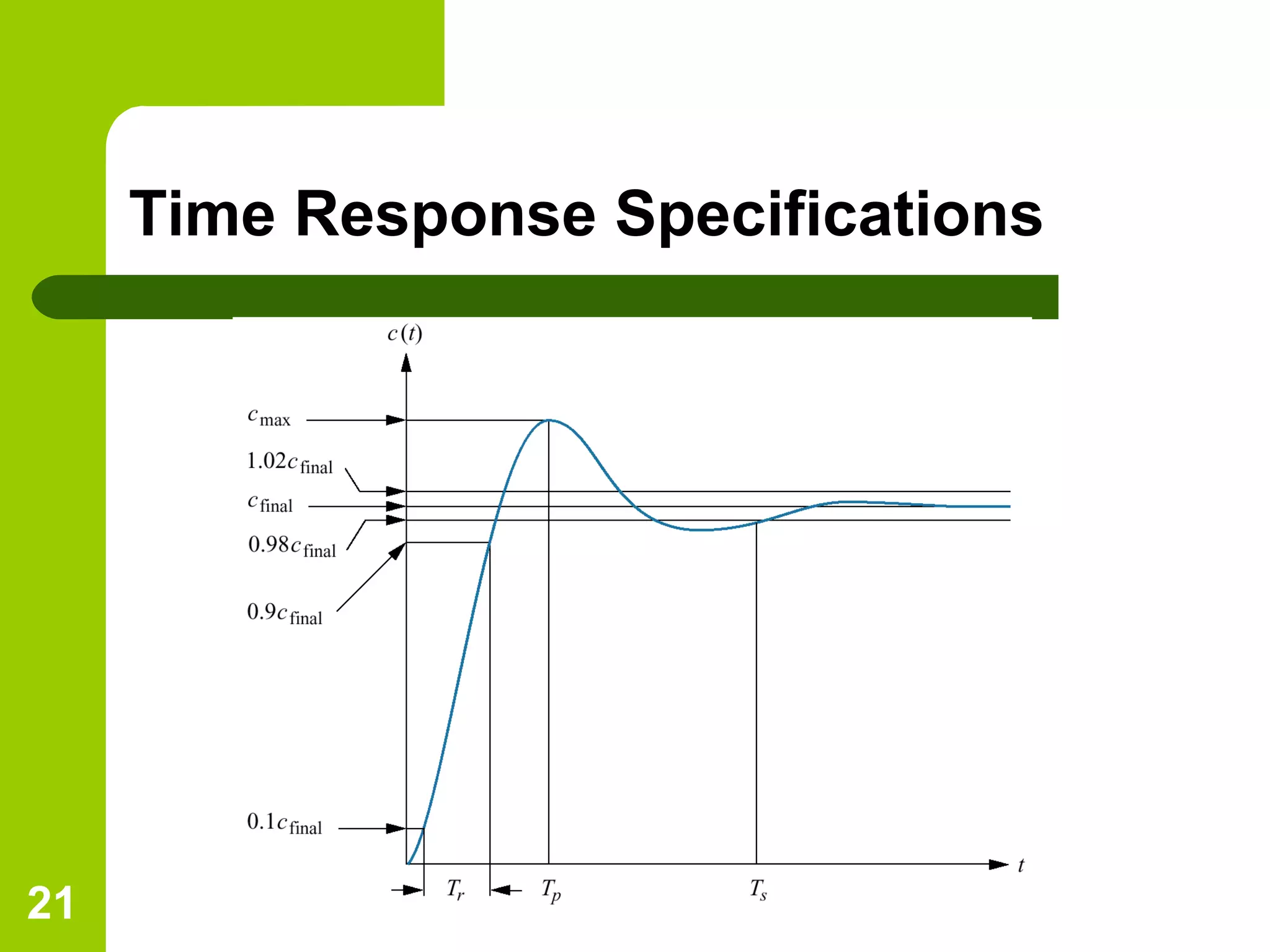
The document discusses time response analysis in control systems, focusing on the distinction between transient and steady-state responses. It outlines key input signals used for system evaluation and details specific metrics like rise time, settling time, peak time, and percent overshoot. Additionally, it provides mathematical definitions and implications for first and second-order system responses.









1()(
1
1
222
2
2
ζωζω
ζω
ζ
ω
−++
−
−
=
nn
n
n
s](https://image.slidesharecdn.com/k10655hariomcontroltheory-160512155049/75/K10655-hariom-control-theory-25-2048.jpg)

























































![K11579 (himanshu chuhan_)ms[1]](https://cdn.slidesharecdn.com/ss_thumbnails/k11579himanshuchuhanms1-160513151032-thumbnail.jpg?width=640&height=640&fit=bounds)






































