1) The document discusses Time-Sensitive Linux (TSL), which aims to support time-sensitive applications on commodity operating systems like Linux.
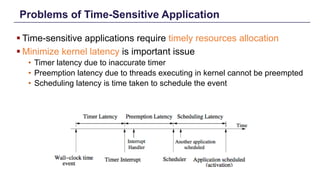
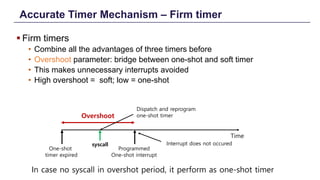
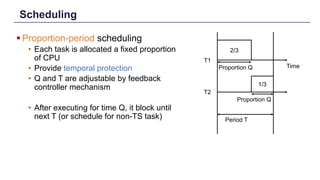
2) TSL improves kernel latency through an accurate timer mechanism called firm timers, a responsive kernel using lock-breaking preemption, and effective scheduling using proportion-based and priority-based algorithms.
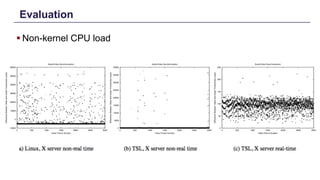
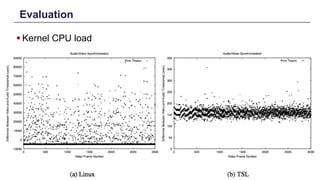
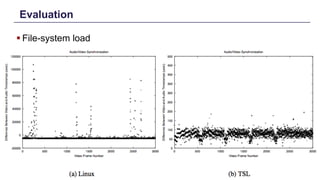
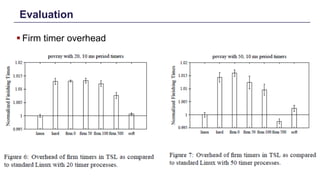
3) Evaluation shows TSL reduces timer latency to under 1ms and preemption latency to under 1ms, improving synchronization of media playback under load compared to standard Linux.