Downloaded 22 times
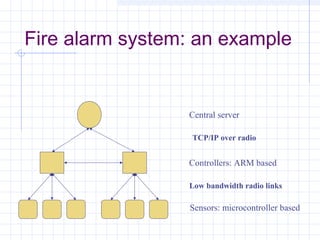

This document discusses real time operating systems for networked embedded systems. It provides an example of a fire alarm system with hundreds of sensors communicating over low bandwidth radio links to controllers and a central server. It outlines the challenges in ensuring sensor information is logged and appropriate action initiated in real time. The document then discusses real time operating systems, including scheduling algorithms like priority scheduling and clock driven scheduling. It covers features of RTOS like interrupt handling and resource allocation. Finally, it mentions specific RTOS like Linux, RTLinux, and the author's own rtker RTOS.