Here are the steps to solve this scheduling problem:
1. Static Priority:
A: 120 (default)
B: 105 (nice value -15)
C: 95 (real-time priority -5)
D: 100 (real-time priority 0)
2. Quantum Time:
A: 100 ms
B: 80 ms
C: 200 ms (real-time)
D: no quantum (SCHED_FIFO)
3. Dynamic Priority:
A: 120
B: 105
4. Schedule (Gantt Chart):
0-100ms: A runs
100-180ms: B runs
180-380ms: C runs
380-480







![Data structure
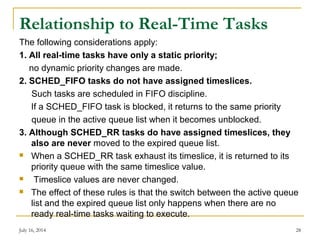
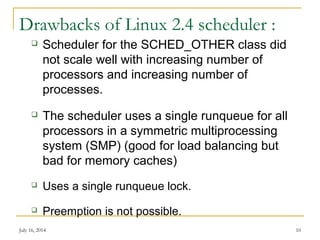
The kernel maintains two scheduling data structure for
each processor in the system, of the following form
struct prio_array {
int nr_active; /* number of tasks in this array*/
unsigned long bitmap[BITMAP_SIZE]; /* priority bitmap */
struct list_head queue[MAX_PRIO]; /* priority queues */
Two such structures are maintained:
an active queues structure and
an expired queues structure.
A separate queue is maintained for each priority level.
July 16, 2014 16](https://image.slidesharecdn.com/lecture16cpuscheduling-140716044212-phpapp02/85/cpu-scheduling-in-os-16-320.jpg)
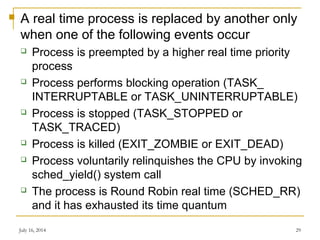
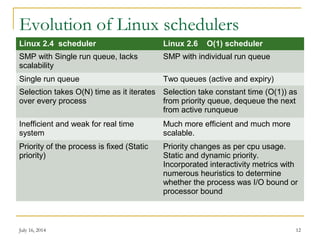
![List of Tasks Indexed According to
Prorities
July 16, 2014 17
[139 ] [139 ]](https://image.slidesharecdn.com/lecture16cpuscheduling-140716044212-phpapp02/85/cpu-scheduling-in-os-17-320.jpg)



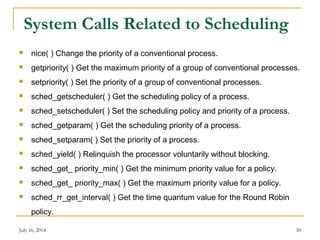
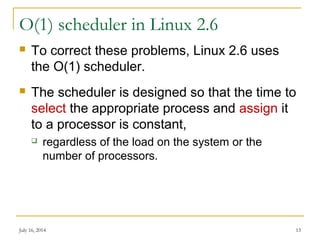
![Calculating Static Priority of a process
from Nice value
nice() or setpriority() system calls
Changes the static priority of the process
/*Convert user-nice values [ -20 ... 0 ... 19 ] to
static priority [ MAX_RT_PRIO..MAX_PRIO-1 ],
and back */
#define NICE_TO_PRIO(nice)
(MAX_RT_PRIO + (nice) + 20)
#define PRIO_TO_NICE(prio)
((prio) - MAX_RT_PRIO - 20)
July 16, 2014 22](https://image.slidesharecdn.com/lecture16cpuscheduling-140716044212-phpapp02/85/cpu-scheduling-in-os-22-320.jpg)