Downloaded 386 times
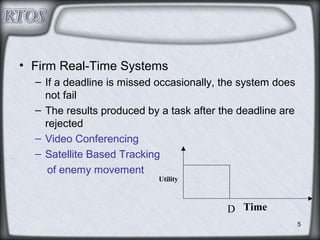
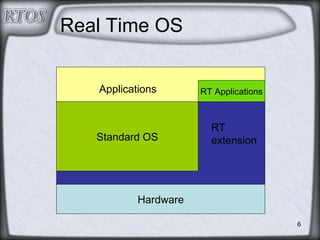



This document provides an overview of real-time operating systems (RTOS), including their key characteristics, scheduling approaches, and commercial examples. RTOS are used in applications that require tasks to complete work and deliver services on time. They use priority-based and clock-driven scheduling algorithms like rate monotonic analysis and earliest deadline first to ensure real-time constraints are met. Commercial RTOS aim to provide features like priority levels, fast task preemption, and predictable interrupt handling for real-time applications.