Downloaded 141 times












![Preemptible Kernel
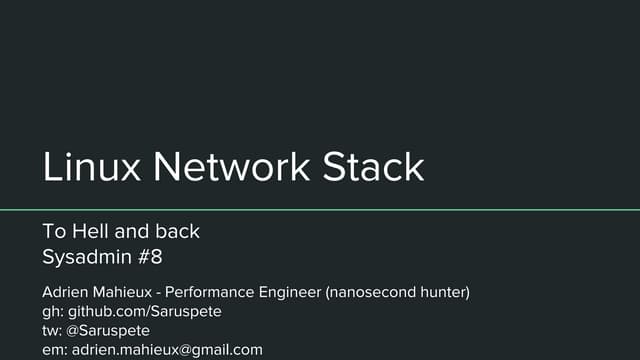
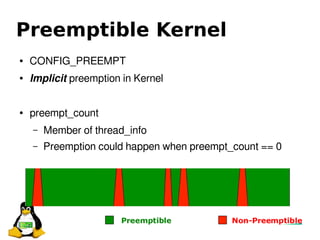
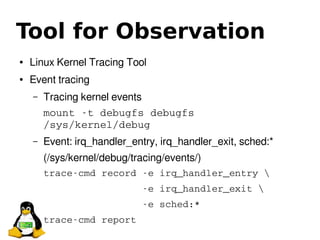
● Kernel preemption could happen when
– return from irq handler
__irq_svc:
svc_entry
irq_handler
#ifdef CONFIG_PREEMPT
get_thread_info tsk
ldr r8, [tsk, #TI_PREEMPT] @ get preempt count
teq r8, #0 @ if preempt count != 0
bne 1f @ return from exeption
ldr r0, [tsk, #TI_FLAGS] @ get flags
tst r0, #_TIF_NEED_RESCHED @ if NEED_RESCHED is set
blne svc_preempt @ preempt!
...
#endif](https://image.slidesharecdn.com/preempt-rt-150601103137-lva1-app6891/85/Linux-Preempt-RT-Internals-15-320.jpg)















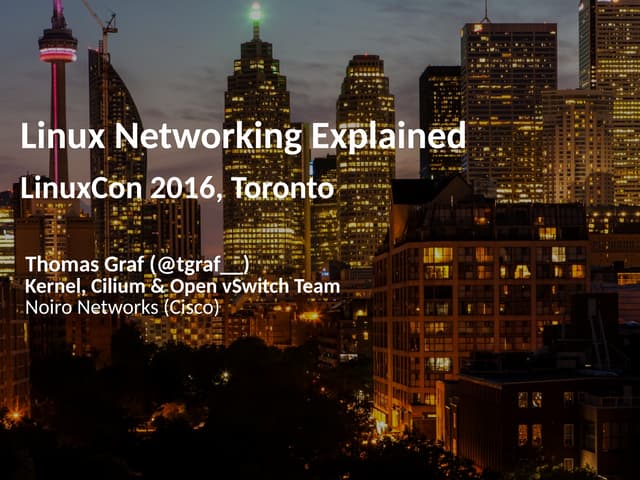
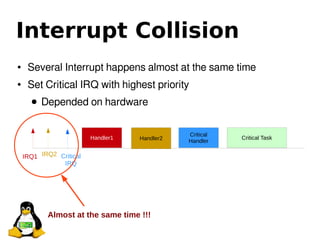
![Trace Log Format
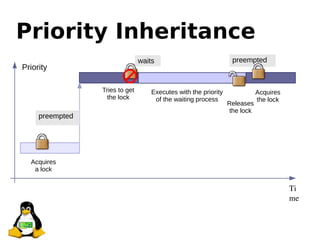
● tracecmd1061 [000] 142.334403: irq_handler_entry:
irq=21 name=critical_irq
Current
Task
CPU# Time
Stamp
Event
Name
Message
trace-cmd-1061 [000] 142.334403 irq_handler_entry Irq=21
name=critical_irq](https://image.slidesharecdn.com/preempt-rt-150601103137-lva1-app6891/85/Linux-Preempt-RT-Internals-35-320.jpg)

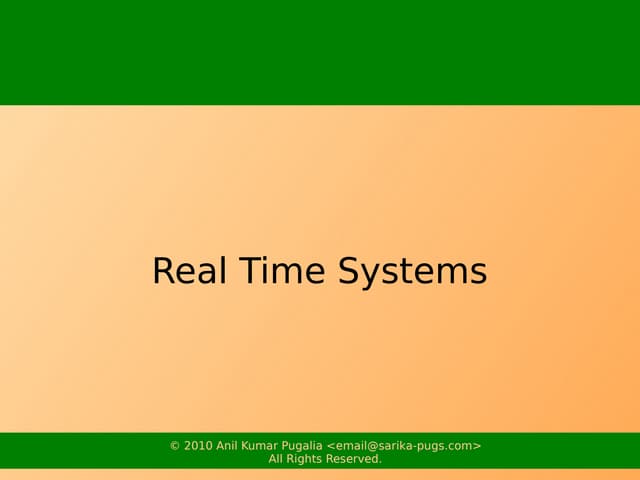
![Trace Log
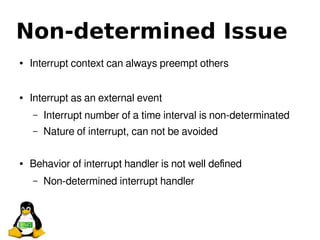
tracecmd1061 [000] 142.334403: irq_handler_entry: irq=29
name=critical_irq
tracecmd1061 [000] 142.334437: sched_wakeup:
critical_task:1056 [9] success=1 CPU:000
tracecmd1061 [000] 142.334456: irq_handler_exit: irq=29
ret=handled
tracecmd1061 [000] 142.334480: sched_wakeup:
ksoftirqd/0:3 [98] success=1 CPU:000
tracecmd1061 [000] 142.334526: sched_switch: trace
cmd:1061 [120] R ==> critical_task:1056 [9]](https://image.slidesharecdn.com/preempt-rt-150601103137-lva1-app6891/85/Linux-Preempt-RT-Internals-37-320.jpg)



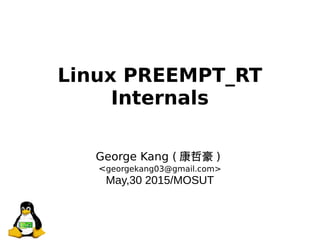
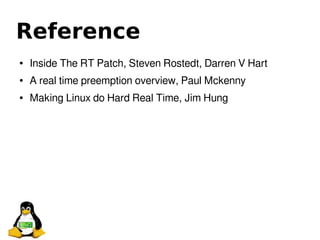
![● Trace Log
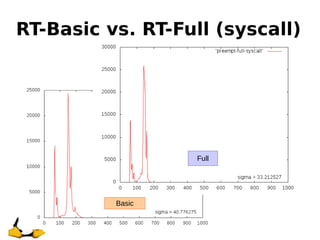
tracecmd1079 [000] 1074.488916: irq_handler_entry: irq=29
name=critical_irq
tracecmd1079 [000] 1074.488970: sched_wakeup: critical_task:1056
[9] success=1 CPU:000
tracecmd1079 [000] 1074.488992: irq_handler_exit: irq=29 ret=handled
tracecmd1079 [000] 1074.489018: sched_wakeup: ksoftirqd/0:3 [98]
success=1 CPU:000
tracecmd1079 [000] 1074.489046: irq_handler_entry: irq=59
name=ohci_hcd:usb1
tracecmd1079 [000] 1074.489056: irq_handler_exit: irq=59 ret=handled
tracecmd1079 [000] 1074.489075: sched_wakeup: irq/59ohci_hcd:979
[49] success=1 CPU:000
tracecmd1079 [000] 1074.489113: sched_stat_runtime: comm=tracecmd
pid=1079 runtime=694958 [ns] vruntime=30984068262 [ns]
tracecmd1079 [000] 1074.489139: sched_switch: tracecmd:1079 [120]
R ==> critical_task:1056 [9]
critical_task1056 [000] 1074.489233: irq_handler_entry: irq=21
name=clockevent
critical_task1056 [000] 1074.489361: irq_handler_exit: irq=21
ret=handled
critical_task1056 [000] 1074.489424: sched_switch:
critical_task:1056 [9] D ==> irq/59ohci_hcd:979 [49]
Interrupt Preemption](https://image.slidesharecdn.com/preempt-rt-150601103137-lva1-app6891/85/Linux-Preempt-RT-Internals-41-320.jpg)






Linux PREEMPT_RT improves the preemptiveness of the Linux kernel by allowing preemption everywhere except when preemption is disabled or interrupts are disabled. This reduces latency from preemption, critical sections, and interrupts. However, non-deterministic external interrupt events and timing as well as interrupt collisions can still cause unpredictable latency. Tracing tools can help analyze latency but practical issues remain in fully guaranteeing hard real-time behavior.