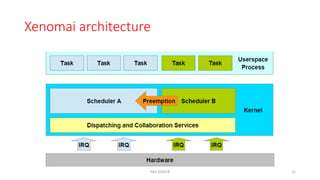
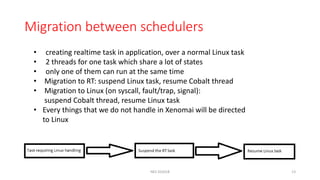
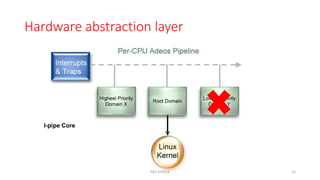
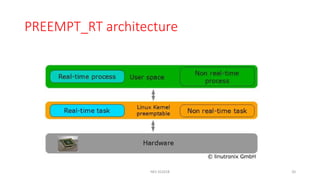
The document presents an overview of real-time Linux (RT-Linux) and its implementation approaches, particularly focusing on the preempt_rt patch and Xenomai framework. It discusses the differences between hard and soft real-time requirements, critical sections, and various strategies for achieving determinism in Linux. The conclusion emphasizes the advantages of preempt_rt and Xenomai in terms of stability, usability, and performance for real-time applications.