Downloaded 24 times

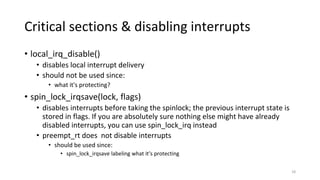
![Critical sections & disabling interrupts
• Avoid using
• local_irq_save()
• preempt_disable()
• get_cpu_var() since it calls preempt_disable() for per_cpu variables
• per_cpu variables can be manipulated without explicit locking
• rwlocks
• Writes must wait for unknown amount of readers
• Use
• get_cpu_light()
• local_lock[_irq[save]](var)
• get_local_var(var)
19](https://image.slidesharecdn.com/t5ivtws5smq2ujmywvlw-signature-2335e6be4037224a019b4d63747012317f89ebc7a90f44cf7ccc60754b5692b3-poli-160603124730/85/Preempt_rt-realtime-patch-19-320.jpg)



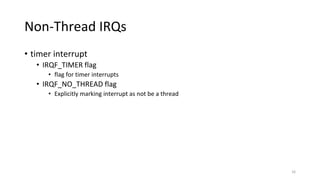
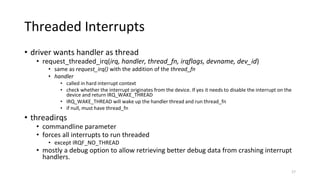
This document discusses the modifications and configurations necessary for implementing real-time Linux using the preempt_rt patch, highlighting its importance in embedded development for hard, soft, and firm real-time requirements. It details various approaches, advantages, and configurations of real-time Linux, including kernel preemption, interrupt handling, and scheduler behavior. Additionally, it offers links to kernel API documents and resources for further research on real-time implementations.










![[231]운영체제 수준에서의 데이터베이스 성능 분석과 최적화](https://cdn.slidesharecdn.com/ss_thumbnails/231-171017003147-thumbnail.jpg?width=640&height=640&fit=bounds)