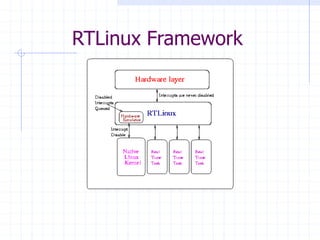
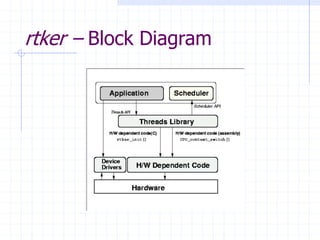
This document discusses real-time operating systems and their features. It defines hard and soft real-time systems, describes common scheduling and resource allocation algorithms used in real-time OSs like priority scheduling and priority inversion solutions. It also discusses Linux for real-time applications and the RTLinux framework, as well as the presenter's own RTOS called rtker which uses a pluggable scheduler and two-level interrupt handling. Other commercial RTOSs mentioned include LynxOS, VxWorks, and pSOS.