Downloaded 157 times















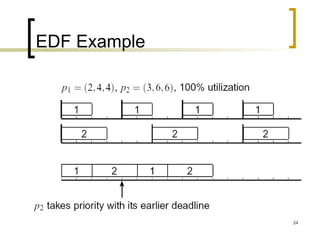




The document discusses real-time systems and scheduling strategies for tasks in real-time systems. It defines real-time systems as systems that must respond to inputs within a specified time period. It describes different types of tasks (periodic, aperiodic, sporadic) and characteristics of real-time systems like determinism and responsiveness. It also summarizes common scheduling algorithms for real-time tasks like cyclic executive, rate monotonic scheduling, earliest deadline first scheduling and compares static priority versus dynamic priority scheduling.