Downloaded 337 times
![STATOR DESIGN
of an
ELECTRIC MOTOR
S.VARUN
M.Tech[EST]
SRM UNIVERSITY
1](https://image.slidesharecdn.com/statordesign-170104054155/85/Stator-design-1-320.jpg)
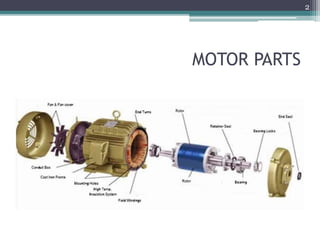














The document discusses the design of the stator in an electric motor. It covers key aspects of stator design including the stator lamination material and patterns, winding methods, insulation techniques, and manufacturing processes. Design considerations like reducing cogging torque, maintaining a small air gap, effective stator cooling, and robust stator construction are also addressed to optimize motor performance and reliability.








































![ME 312 Mechanical Machine Design [Screws, Bolts, Nuts]](https://cdn.slidesharecdn.com/ss_thumbnails/me312-dsulec10-screws-170213050612-thumbnail.jpg?width=640&height=640&fit=bounds)


![ME 312 Mechanical Machine Design - Introduction [Week 1]](https://cdn.slidesharecdn.com/ss_thumbnails/me312-dsulec01-170213050149-thumbnail.jpg?width=640&height=640&fit=bounds)










































