Downloaded 1,146 times













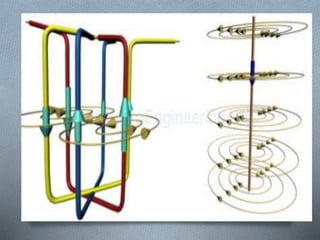

































The document discusses induction motors. It explains that an induction motor works by electromagnetic induction, where the alternating current in the stator produces a rotating magnetic field that induces current in the rotor and causes it to turn. It describes the basic components of induction motors including the stator, rotor, and housing. It also discusses how varying the frequency of the alternating current supply can be used to control the motor's speed.