Downloaded 1,034 times

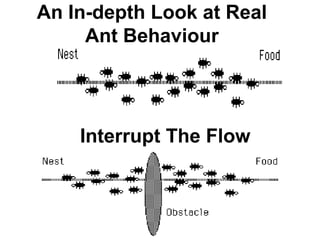
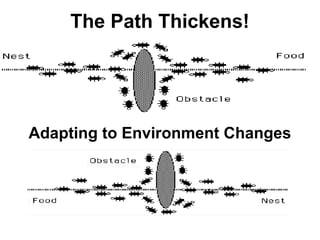
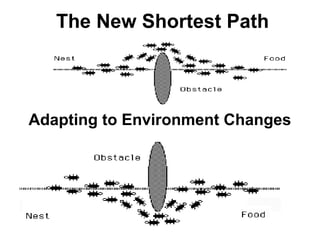
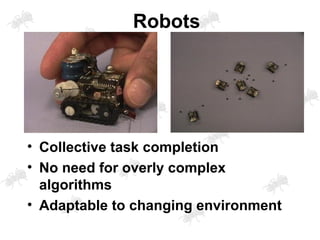
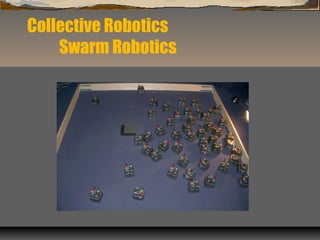
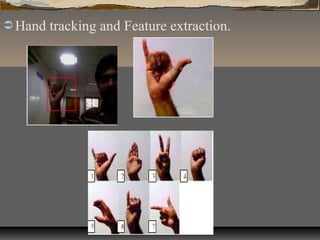
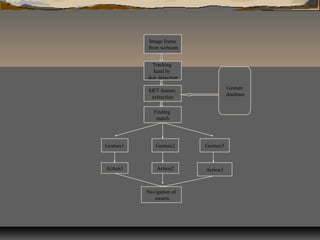

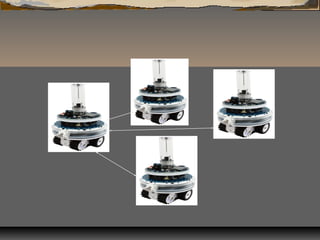



This document provides an overview of swarm robotics. It begins with examples of decentralized control and self-organization in natural swarms like ants and bees. It then discusses how swarm robotics takes inspiration from these systems, using local control methods, local communication, and self-organization to complete collective tasks without centralized control. The rest of the document focuses on a proposed system for gesture recognition to allow human control of swarm robots. It describes hand detection, feature extraction, and hardware implementation using three foot-bot robots. It concludes with potential applications of swarm robotics and areas for future work.