Downloaded 20,314 times
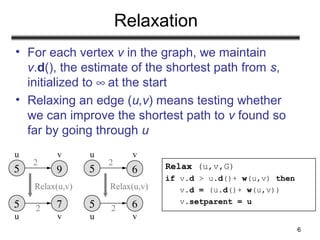
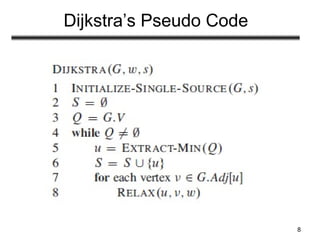
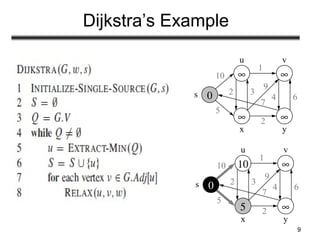
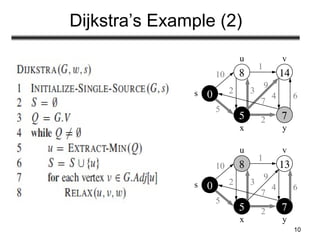
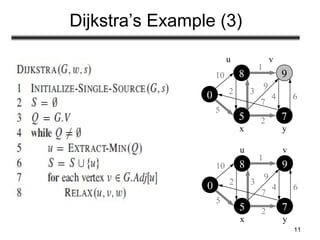

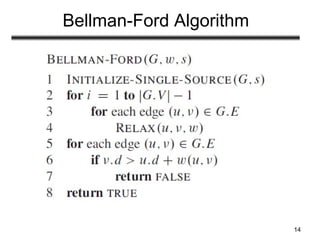
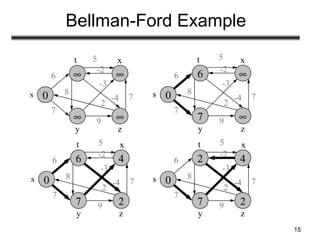
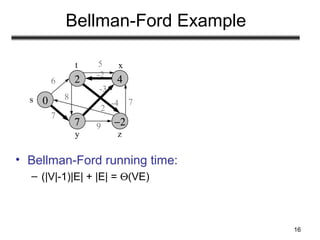
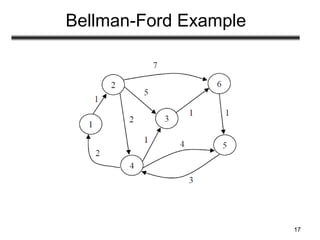

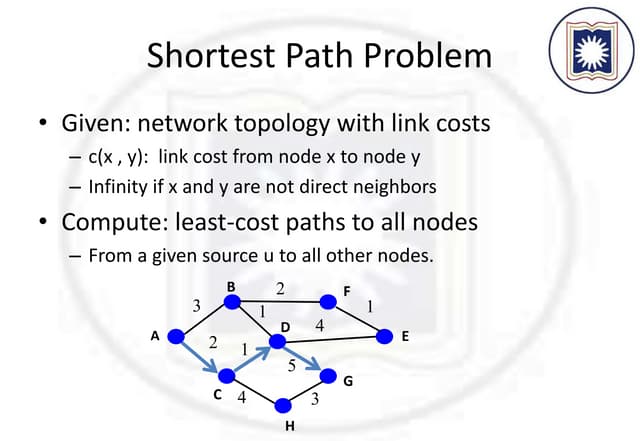
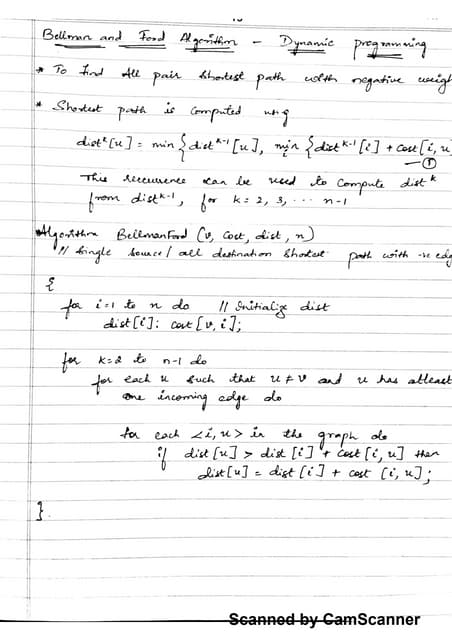
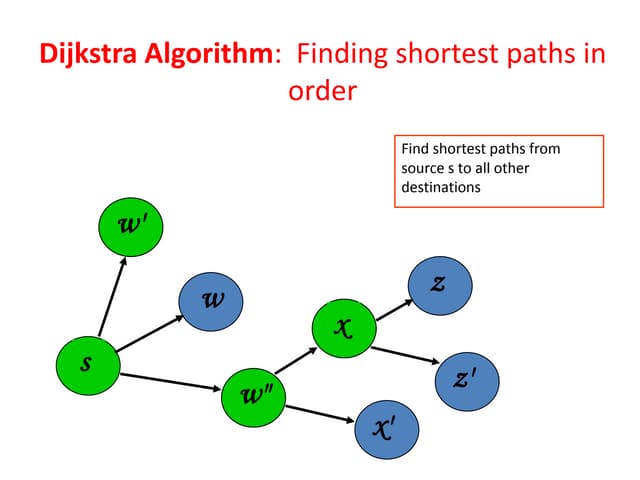
This document discusses algorithms for finding shortest paths in weighted graphs: - Dijkstra's algorithm finds single-source shortest paths in graphs with non-negative edge weights using a greedy approach and priority queue. It runs in O(ElogV) time with a Fibonacci heap. - Bellman-Ford algorithm can handle graphs with negative edge weights by relaxing all edges V-1 times to detect negative cycles. It runs in O(VE) time. - Examples are provided to illustrate the relaxation process and execution of both algorithms on sample graphs. Key properties like handling of negative weights and cycles are also explained.


















![Depth first search [dfs]](https://cdn.slidesharecdn.com/ss_thumbnails/depthfirstsearchdfs-190926145304-thumbnail.jpg?width=640&height=640&fit=bounds)