![Shortest Paths Problems
The shortest paths from a source vertex s are organized
as a tree
Shortest paths tree
p[u] used to store the predecessor of any vertex in the tree
The weight can be any measure that is additive and we
would like to minimize: distance, cost, time, penalties,
etc.
Generalization of BFS for a weighted graph](https://image.slidesharecdn.com/adc10-101226124010-phpapp01/85/Algorithm-Design-and-Complexity-Course-10-5-320.jpg)
![Directed Graphs?
Usually, the algorithms for shortest path are developed
for directed graphs
However, they also work for undirected graphs
But must be adapted!
The greatest problem: not go back on the same edge to
the predecessor:
If the last edge considered for building a SP is (p[u], u) then do
not allow to go back to p[u] from u!](https://image.slidesharecdn.com/adc10-101226124010-phpapp01/85/Algorithm-Design-and-Complexity-Course-10-7-320.jpg)
![SSSP: Single-Source Shortest Paths
G(V, E) and source s∈V
Find δ(s, v) for all v∈V
All the SSSP algorithms use two arrays:
d[u] = the cost of the best path s..u discovered by the
algorithm at the current moment
An estimation of the shortest path δ(s, u)
Initially d[u] = INF
Iteratively reduces d[u], but always d[u] >= δ(s, u)
We want d[u] = δ(s, u) when the algorithm finishes
p[u] = the predecessor of u from the best path s..u discovered
by the algorithm at the current moment
Initially p[u] = NIL](https://image.slidesharecdn.com/adc10-101226124010-phpapp01/85/Algorithm-Design-and-Complexity-Course-10-11-320.jpg)
![Initialization
Pessimistic: assume no path exits to any other vertex
except the source
INIT-SSSP(G, s)
FOREACH (v∈V)
d[v] = INF
p[v] = NIL
d[s] = 0](https://image.slidesharecdn.com/adc10-101226124010-phpapp01/85/Algorithm-Design-and-Complexity-Course-10-13-320.jpg)
![Relaxing an Edge
Try to improve the estimation for vertex v, d[v], by
relaxing the edge (u, v)
Maybe (u, v) is the last edge on a better path from the
source (d[u]+w(u,v)) than the one that has been
computed until now by the algorithm for v (d[v])
RELAX(u, v)
IF (d[v] > d[u] + w(u, v))
d[v] = d[u] + w(u, v)
p[v] = u](https://image.slidesharecdn.com/adc10-101226124010-phpapp01/85/Algorithm-Design-and-Complexity-Course-10-14-320.jpg)
![Relaxing an Edge – Examples
d[v] changes after relaxing (u,v)
s
d=10
s
v
w(u,v)=2
d=5
d=7
v
u
w(u,v)=2
d=5
u
d[v] does not change after relaxing (u,v)
s
d=10
s
v
w(u,v)=6
d=5
u
d=10
v
w(u,v)=6
d=5
u](https://image.slidesharecdn.com/adc10-101226124010-phpapp01/85/Algorithm-Design-and-Complexity-Course-10-15-320.jpg)
![Upper-Bound Property
After any number of edge relaxations, d[v] >= δ(s, v) for all
v∈V
Proof by contradiction!
Initially, this is true as d[v] = INF for all v∈V
Let v be the first vertex for which d[v] < δ(s, v)
If u = p[v] that caused d[v] to change
d[v] < δ(s, v) <= δ(s, u) + w(u,v) <= d[u] +w(u,v)
=> d[v] < d[u] +w(u,v)
Contradicts, d[v] = d[u] +w(u,v)
Once d[v] = δ(s, v), it never changes!
True, since relaxing an edge can only decrease d[v]](https://image.slidesharecdn.com/adc10-101226124010-phpapp01/85/Algorithm-Design-and-Complexity-Course-10-17-320.jpg)
![No-Path Property
If u is not reachable from s, then d[u] = δ(s, u) = INF
Use previous property!](https://image.slidesharecdn.com/adc10-101226124010-phpapp01/85/Algorithm-Design-and-Complexity-Course-10-18-320.jpg)
![Convergence Property
Used by all algorithms
If s..u→v is a shortest path and d[u] = δ(s, u) when we
call RELAX(u, v), then d[v] = δ(s, v) afterwards
d[v] <= d[u] + w(u,v) = δ(s, u) + w(u,v) = δ(s, v)
But d[v] >= δ(s, v)
It means d[v] = δ(s, v)
](https://image.slidesharecdn.com/adc10-101226124010-phpapp01/85/Algorithm-Design-and-Complexity-Course-10-19-320.jpg)
![Path Relaxation Property
Let p = <v0 = s, v1, … , vk> be a shortest path v0..vk
If we relax in order (v0, v1), (v1, v2), … , (vk-1, vk)
even intermixed with other relaxations
then d[vk] = δ(s, vk) afterwards
Proof by induction
Base case: k = 0 => p = <v0>
d[v0] = d[s] = 0 = δ(s, s)
Inductive step: Basis d[vk-1] = δ(s, vk-1) and RELAX(vk-1, vk)
=> convergence property => d[vk] = δ(s, vk)](https://image.slidesharecdn.com/adc10-101226124010-phpapp01/85/Algorithm-Design-and-Complexity-Course-10-20-320.jpg)
![Dijkstra’s Algorithm
G(V, E) with no negative weight edges reachable from the
source
The algorithm does not always compute the correct shortest
paths if negative weight edges are reachable from the source
It is a generalization of BFS
Greedy algorithm
Uses a priority queue Q to extract the min(d[v]) of the
“unvisited” vertices
It is also similar to Prim’s algorithm
The set of vertices for which the shortest path has already
been determined – S](https://image.slidesharecdn.com/adc10-101226124010-phpapp01/85/Algorithm-Design-and-Complexity-Course-10-21-320.jpg)
![Dijkstra – Pseudocode
Dijkstra(G, w, s)
INIT-SSSP(G, s)
S=∅
Q = PRIORITY-QUEUE(V, d)
// build a priority queue indexed by the vertices V
// with priorities in d[u] for each vertex
WHILE (!Q.EMPTY())
u = Q.EXTRACT-MIN()
// greedy choice
S = S U {u}
FOREACH (v∈Adj[u])
RELAX(u, v)
// may need to heapify-up the element if d[v] has changed after this relaxation!
// Q.DECREASE-KEY(v, d[v])](https://image.slidesharecdn.com/adc10-101226124010-phpapp01/85/Algorithm-Design-and-Complexity-Course-10-22-320.jpg)
![Dijkstra – Remarks
Dijkstra is greedy because it always chooses a vertex u
that is not in S, but has the minimum path s..u from all
the remaining vertices in Q
Any vertex is either in Q or in S
Loop invariant: d[v] = δ(s, v) for all v∈S
Termination: S = V => d[v] = δ(s, v) for all v∈V
Need to prove the maintenance of the invariant!](https://image.slidesharecdn.com/adc10-101226124010-phpapp01/85/Algorithm-Design-and-Complexity-Course-10-23-320.jpg)
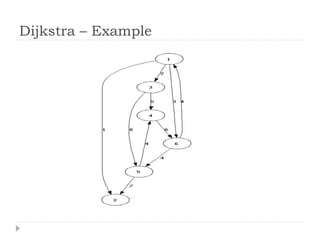
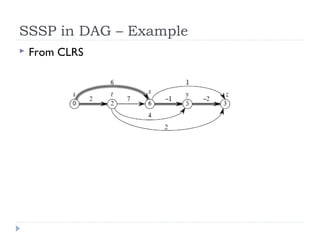
![Dijkstra – Example (2)
d[1] = 0;
(1): d[2] = 1; d[3] = 2; d[6] = 3;
(2): d[4] = 7; d[5] = 10;
(3): d[5] = 7;](https://image.slidesharecdn.com/adc10-101226124010-phpapp01/85/Algorithm-Design-and-Complexity-Course-10-27-320.jpg)
![Bellman-Ford Algorithm
Works for graphs with both positive and negative edges
It also detects negative weight cycles reachable from the
source
Uses the path relaxation property
And the fact that any shortest path must have at most |V|
- 1 edges
It returns FALSE if it discovers a negative cycle in order
to let you know that the values in d[v] are not correct!](https://image.slidesharecdn.com/adc10-101226124010-phpapp01/85/Algorithm-Design-and-Complexity-Course-10-29-320.jpg)
![Bellman-Ford – Pseudocode
Bellman-Ford(G, s)
INIT-SSSP(G, s)
FOR (i = 1..|V|-1)
FOREACH ((u,v)∈E)
RELAX(u,v)
FOREACH ((u,v)∈E)
IF (d[v] > d[u] + w(u,v))
RETURN FALSE
RETURN TRUE
Complexity: Θ((n-1)*m) = Θ(n*m) very bad for dense
graphs](https://image.slidesharecdn.com/adc10-101226124010-phpapp01/85/Algorithm-Design-and-Complexity-Course-10-30-320.jpg)
![Bellman-Ford – Remarks
The algorithm tries to relax all the possible paths with |V| - 1 edges
This is why it relaxes each edge |V| - 1 times, in order for it to be in
any position from 1 .. |V|-1 in a possible shortest path
The algorithm can definitely be improved
By considering less edges each time!
E.g. the first edge should always start from s
As, no path can have more than |V|-1 edges, all the shortest path
should be determined after the first two nested loops are over
If we can improve the estimate of any vertex, d[v], by relaxing any
edge one more time than we have reached a negative cycle! This is
exactly what the last cycle does!](https://image.slidesharecdn.com/adc10-101226124010-phpapp01/85/Algorithm-Design-and-Complexity-Course-10-31-320.jpg)
![Bellman-Ford and Negative Cycles
Proof that Bellman-Ford returns FALSE if a negative
weight cycle reachable from s is present in the graph
If BF returns TRUE it means that:
d[u] = δ(s, u) <= δ(s, v) + w(u,v) = d[v] + w(u,v)
for all edges (u,v)∈E
If a negative cycle exists (BF should return FALSE):
Proof by contradiction!
Let p = <v0, … , vk> be the negative cycle
Suppose BF returns TRUE see blackboard](https://image.slidesharecdn.com/adc10-101226124010-phpapp01/85/Algorithm-Design-and-Complexity-Course-10-32-320.jpg)
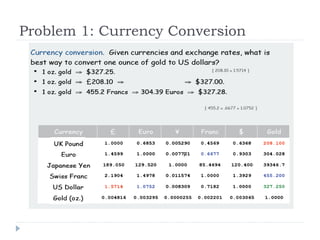

The document provides an overview of algorithms for finding shortest paths in graphs. It discusses Dijkstra's algorithm and the Bellman-Ford algorithm for solving the single-source shortest paths (SSSP) problem. Dijkstra's algorithm uses a greedy approach and only works for graphs with non-negative edge weights, while Bellman-Ford can handle graphs with negative edge weights but requires more iterations to relax all edges. The document also covers properties like optimal substructure, triangle inequality, and initialization procedures that are common to SSSP algorithms.