Download to read offline





![4.3.3. Single-Source Shortest Paths in Directed Acyclic Graphs
By relaxing the edges in a DAG according to their topological sort of its
vertices. We can achieve Θ(n+m) time complexity.
DAG-SHORTEST (G,w,s)
1 Topologically sort the vertices of G
2 INITIALIZE (G,s)
3 for each vertex u taken in topologically sorted (increasing) order
4 do for v∈ Adj [u]
5 do RELAX (u,v,w)
Figure shows an example execution of DAG-SHORTEST on a DAG.](https://image.slidesharecdn.com/daachpater14-200419170158/85/Daa-chpater14-6-320.jpg)
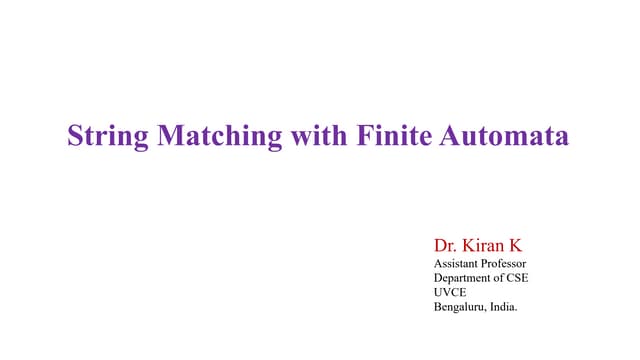
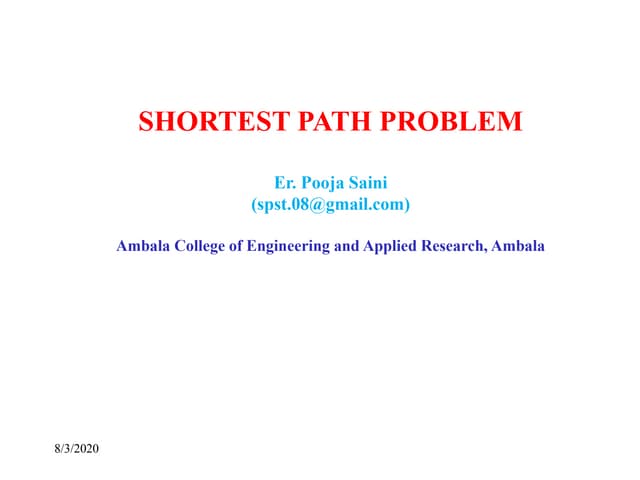
![Figure : Excution of DAG-SHORTEST.
Step (a) shows the state of the graph after initialisation.
Following this, the vertices are considered in topological order: c, s, i,
and then t. As each vertex u is considered, vertices in Adj [u] are relaxed.](https://image.slidesharecdn.com/daachpater14-200419170158/85/Daa-chpater14-7-320.jpg)
![4.3.4. Dijkstra's Algorithm
Dijkstra's algorithm maintains a set S of vertices where minimum paths
have been found and a priority queue Q of the remaining vertices under discovery
ordered by increasing u.d's.
DIJKSTRA(G,w,s)
1. INITIALIZE-SINGLE-SOURCE(G,s)
2. S = ∅
3. Q = G.V
4. while Q ≠ ∅
5. u = EXTRACT-MIN(Q)
6. S = S ∪ {u}
7. for each vertex v ∈ G.Adj[u]
8. RELAX(u,v,w)
INITIALIZE-SINGLE-SOURCE(G,s)
1. for each vertex v ∈ G.V
2. v.d = ∞
3. v.pi = NIL
4. s.d = 0
RELAX(u,v,w)
1. if v.d > u.d + w(u,v)
2. v.d = u.d + w(u,v)
3. v.pi = u
Basically the algorithm works as follows:
1. Initialize d's, π's, set s.d = 0, set S = ∅, and Q = G.V (i.e. put all the
vertices into the queue with the source vertex having the smallest distance)
2. While the queue is not empty, extract the minimum vertex (whose distance
will be the shortest path distance at this point), add this vertex to S, and
relax (using the same condition as Bellman-Ford) all the edges in the
vertex's adjacency list for vertices still in Q reprioritizing the queue if
necessary
The run time of Dijkstra's algorithm depends on how Q is implemented:
Simple array with search ⇒ O(V2
+ E) = O(V2
)](https://image.slidesharecdn.com/daachpater14-200419170158/85/Daa-chpater14-8-320.jpg)




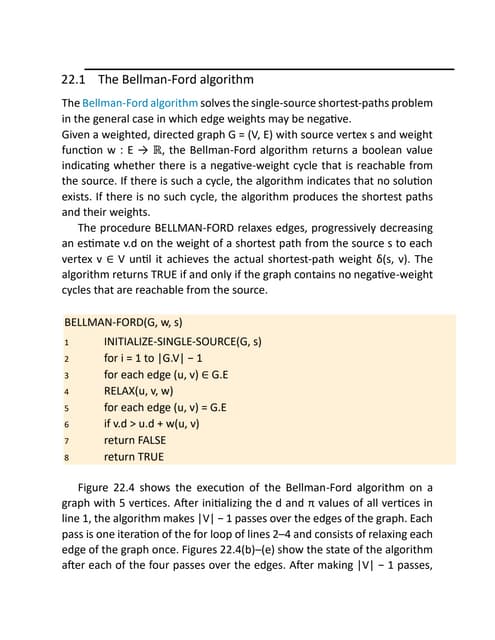
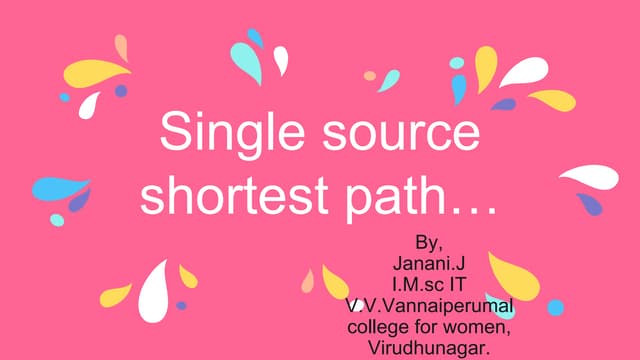
![V={ v0 , v1 , v2 ,…, vn }
... where n is the number of unknowns, v0 is a special source vertex created, and vi
corresponds to xi for 1 ≤ i≤ n. Also, the set of edges ...
E={ vi , vj : x⟨ ⟩ j - xi ≤ bk is a constraint}∪{ v⟨ 0 , vi :i=1,…,n}⟩
Theorem: Given a system Ax ≤ b of difference constraints, let G be the
corresponding constraint graph. If G contains no negative weight cycles, then
x={δ( v0 , v1 ),δ( v0 , v1 ),…,δ( v0 , vn )}
is a feasible solution for the system. Figure shows how this is done for the example
with four unknowns above.
Figure : A constraint graph constructed from our ongoing example using simple
rules:
(1) Each unknown xi maps onto a vertex vi .
(2) For each constraint xj - xi ≤ bk , there is an edge ( vi , vj ) with weight bk .
(3) Add a vertex v0 and have edges from it to all other vertices with weight 0. Next,
use one of the SSSP algorithms to solve d[ vi ] for 0≤i≤n; using v0 as the source.](https://image.slidesharecdn.com/daachpater14-200419170158/85/Daa-chpater14-13-320.jpg)

The document discusses algorithms for solving single-source shortest path problems on directed graphs. It begins by defining the problem and describing Bellman-Ford's algorithm, which can handle graphs with negative edge weights but runs in O(VE) time. It then describes how Dijkstra's algorithm improves this to O(ElogV) time using a priority queue, but requires non-negative edge weights. It also discusses how shortest paths can be found in O(V+E) time on directed acyclic graphs by relaxing edges topologically. Finally, it discusses how difference constraints can be modeled as shortest path problems on a corresponding constraint graph.