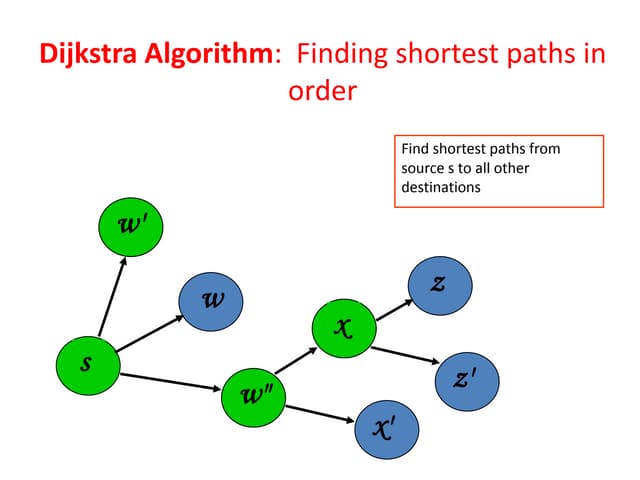
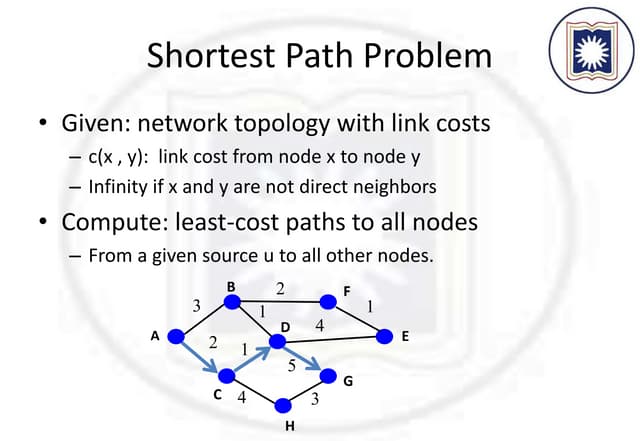
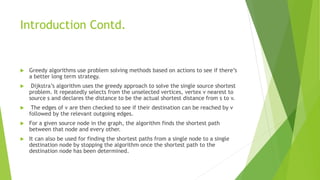
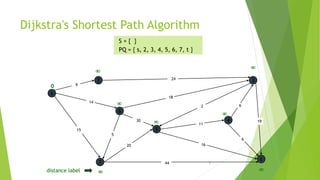
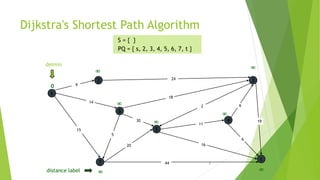
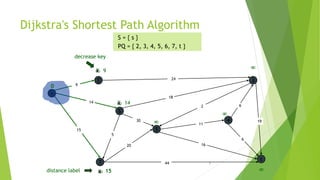
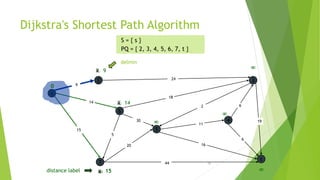
The document describes Dijkstra's algorithm for finding the shortest paths between nodes in a graph. It begins with an overview of how the algorithm works by solving subproblems to find the shortest path from the source to increasingly more nodes. It then provides pseudocode for the algorithm and analyzes its time complexity of O(E+V log V) when using a Fibonacci heap. Some applications of the algorithm include traffic information systems and routing protocols like OSPF.


![More Detailed Knowledge
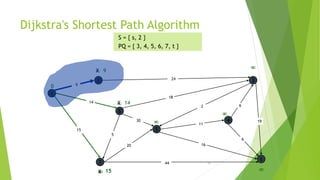
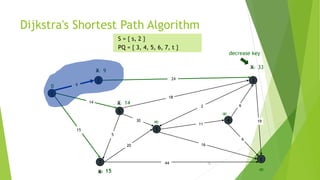
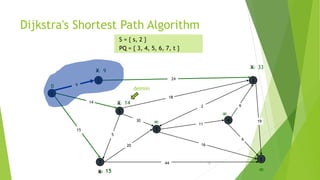
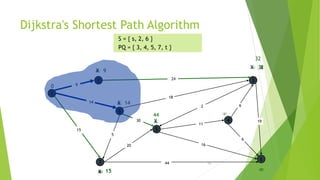
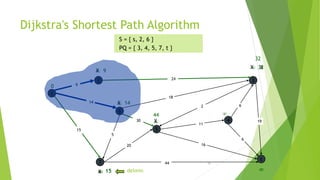
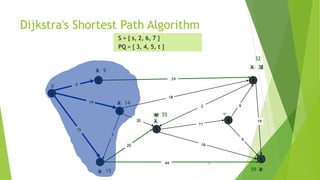
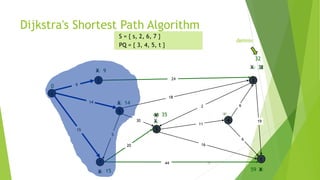
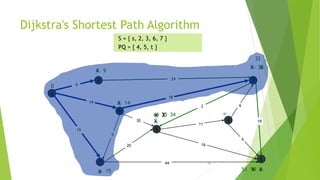
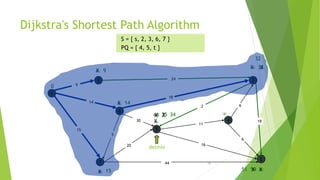
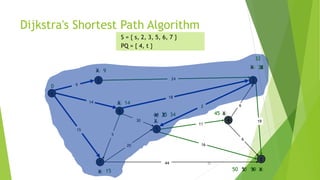
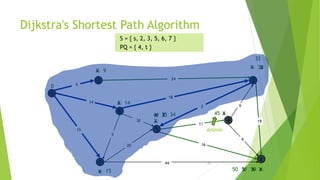
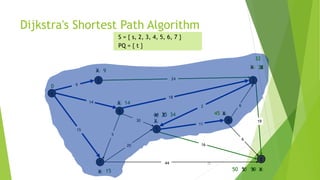
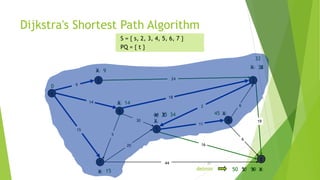
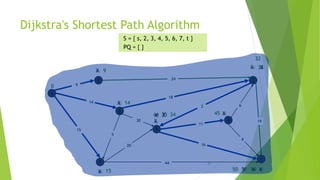
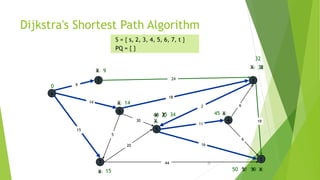
At the kth round, there will be a set called Frontier of k vertices that will
consist of the vertices closest to the source and the vertices that lie outside
frontier are computed and put into New Frontier.
The shortest distance obtained is maintained in sDist[w].
It holds the estimate of the distance from s to w.
Dijkstra’s algorithm finds the next closest vertex by maintaining the New
Frontier vertices in a priority-min queue.](https://image.slidesharecdn.com/dijkstrasalgorithm-150429121637-conversion-gate01/85/Dijkstra-s-algorithm-5-320.jpg)
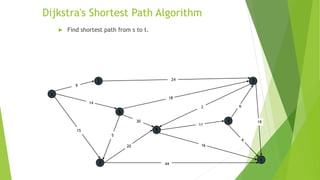
![ALgorithm
function Dijkstra(Graph, source):
dist[source] ← 0 // Distance from source to source
prev[source] ← undefined // Previous node in optimal path initialization
for each vertex v in Graph: // Initialization
if v ≠ source // Where v has not yet been removed from Q (unvisited nodes)
dist[v] ← infinity // Unknown distance function from source to v
prev[v] ← undefined // Previous node in optimal path from source
end if
add v to Q // All nodes initially in Q (unvisited nodes)
end for](https://image.slidesharecdn.com/dijkstrasalgorithm-150429121637-conversion-gate01/85/Dijkstra-s-algorithm-26-320.jpg)
![while Q is not empty:
u ← vertex in Q with min dist[u] // Source node in first case
remove u from Q
for each neighbor v of u: // where v is still in Q.
alt ← dist[u] + length(u, v)
if alt < dist[v]: // A shorter path to v has been found
dist[v] ← alt
prev[v] ← u
end if
end for
end while
return dist[], prev[]
end function](https://image.slidesharecdn.com/dijkstrasalgorithm-150429121637-conversion-gate01/85/Dijkstra-s-algorithm-27-320.jpg)