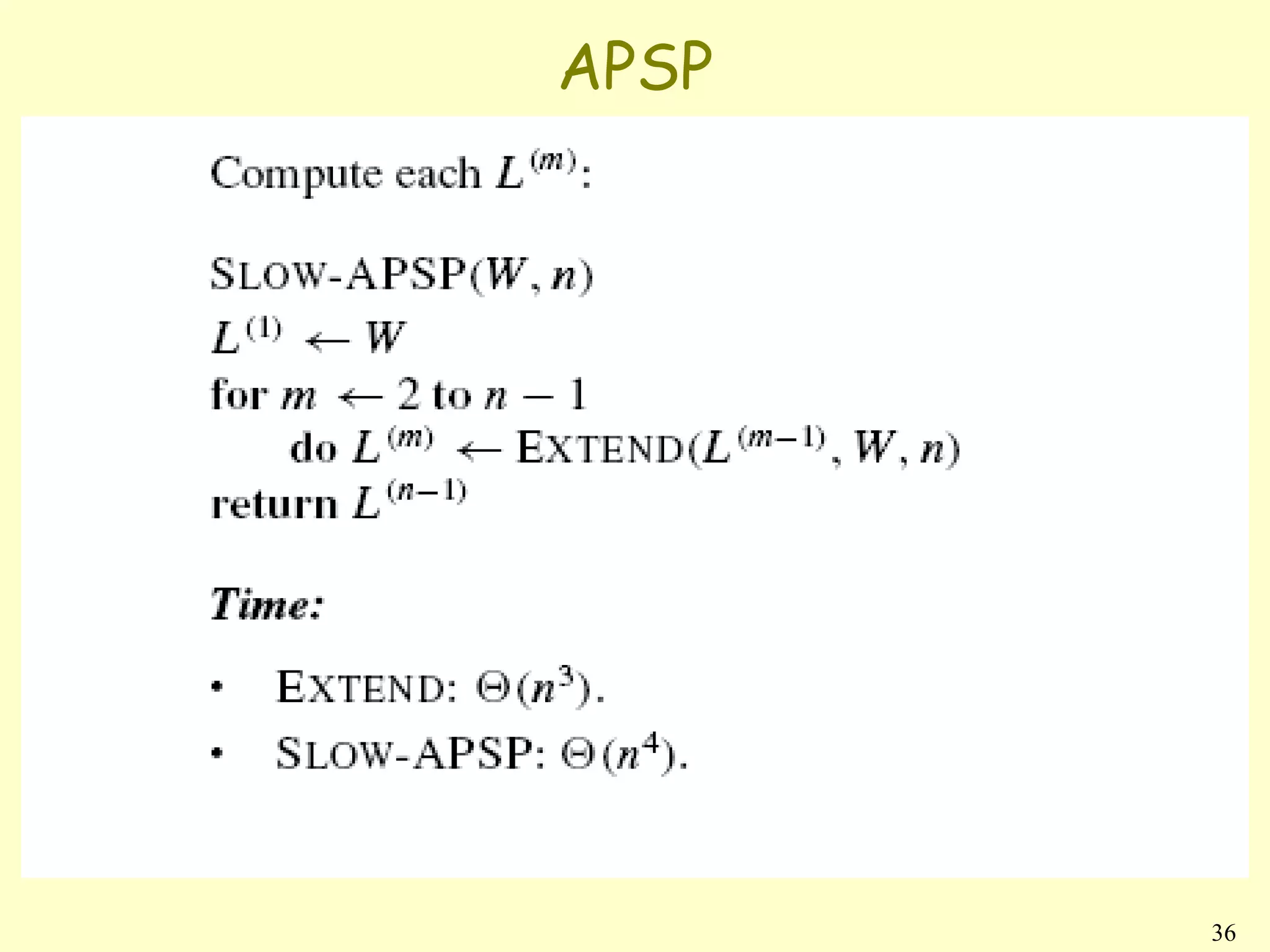
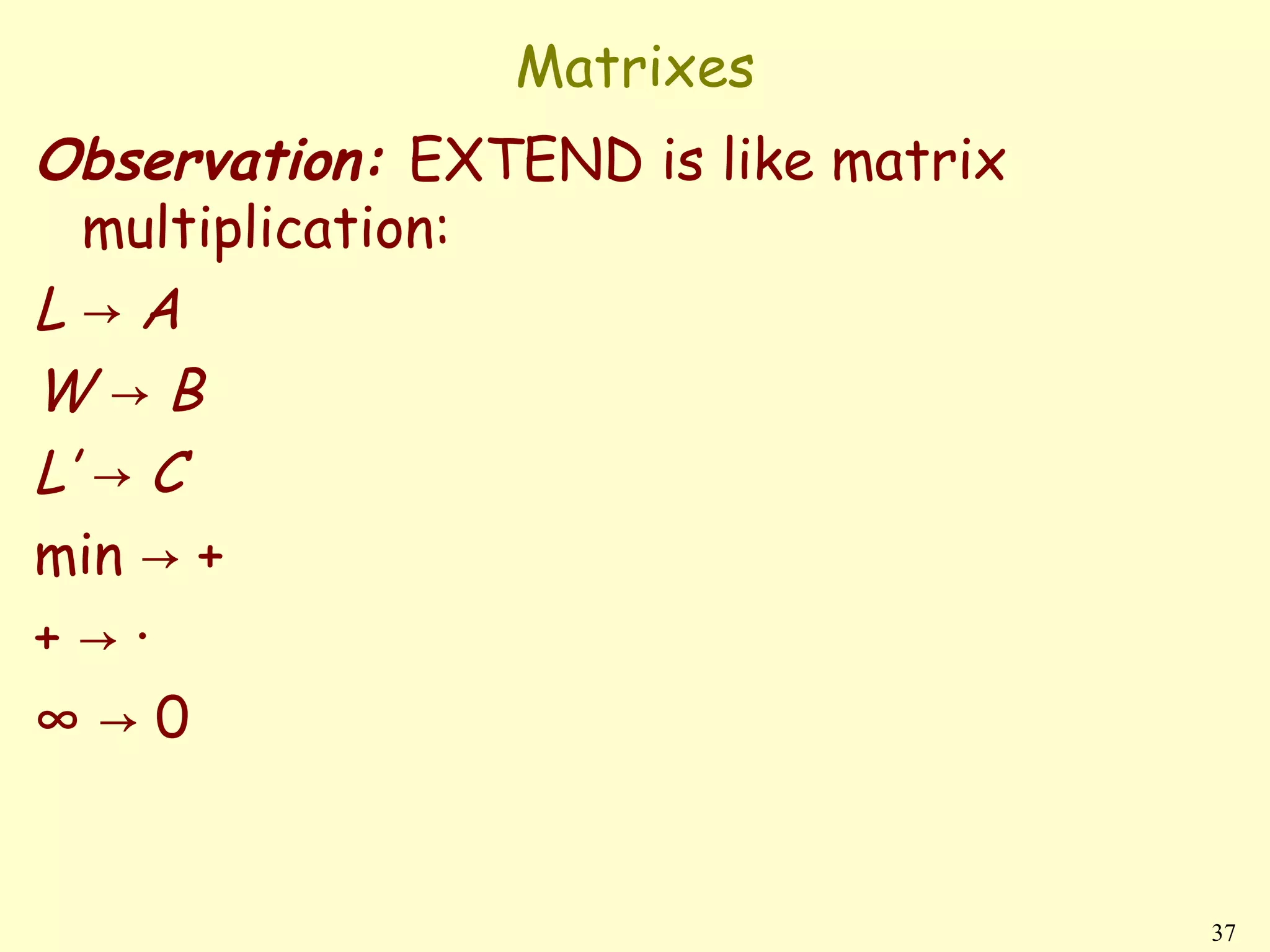
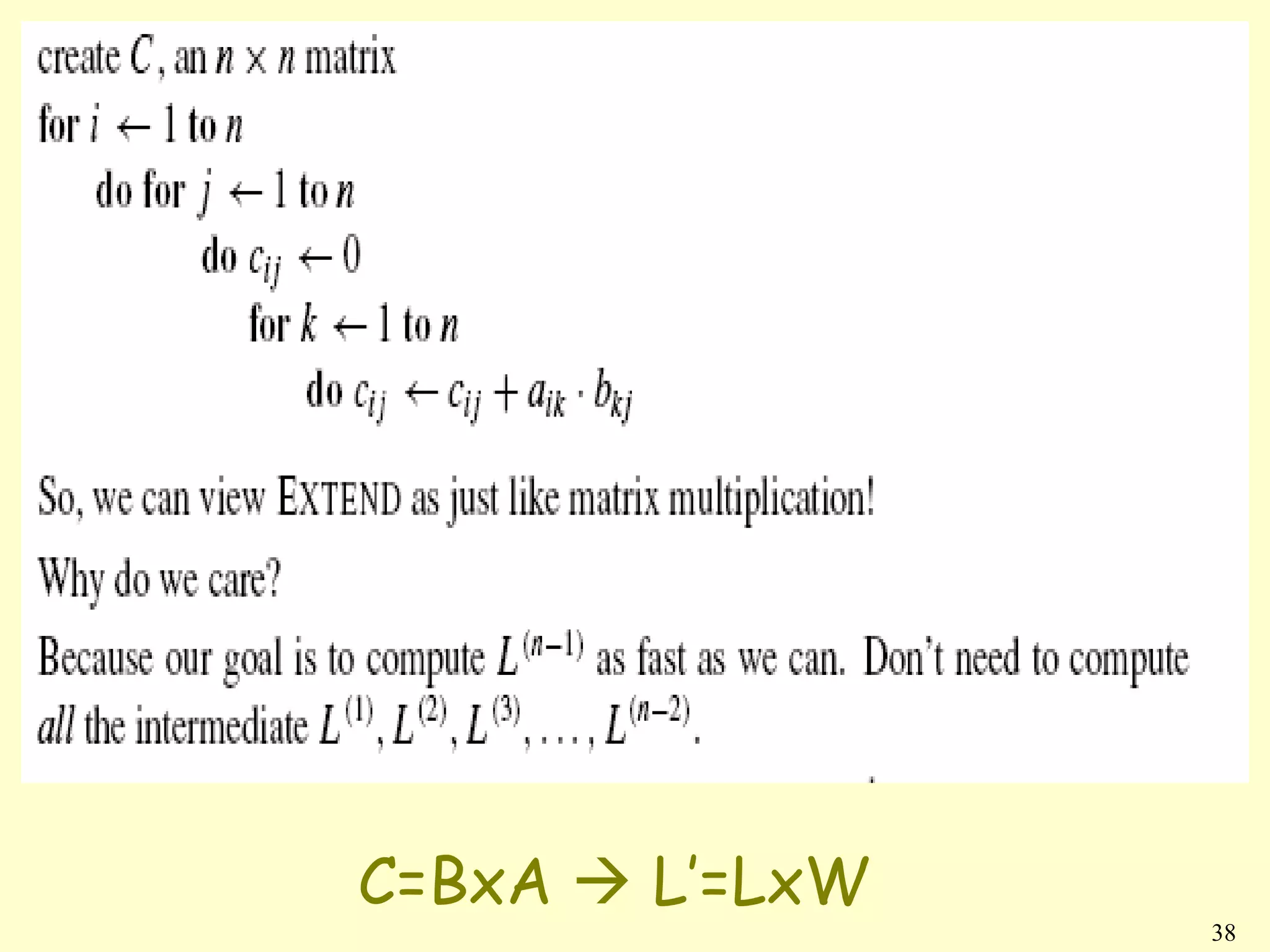
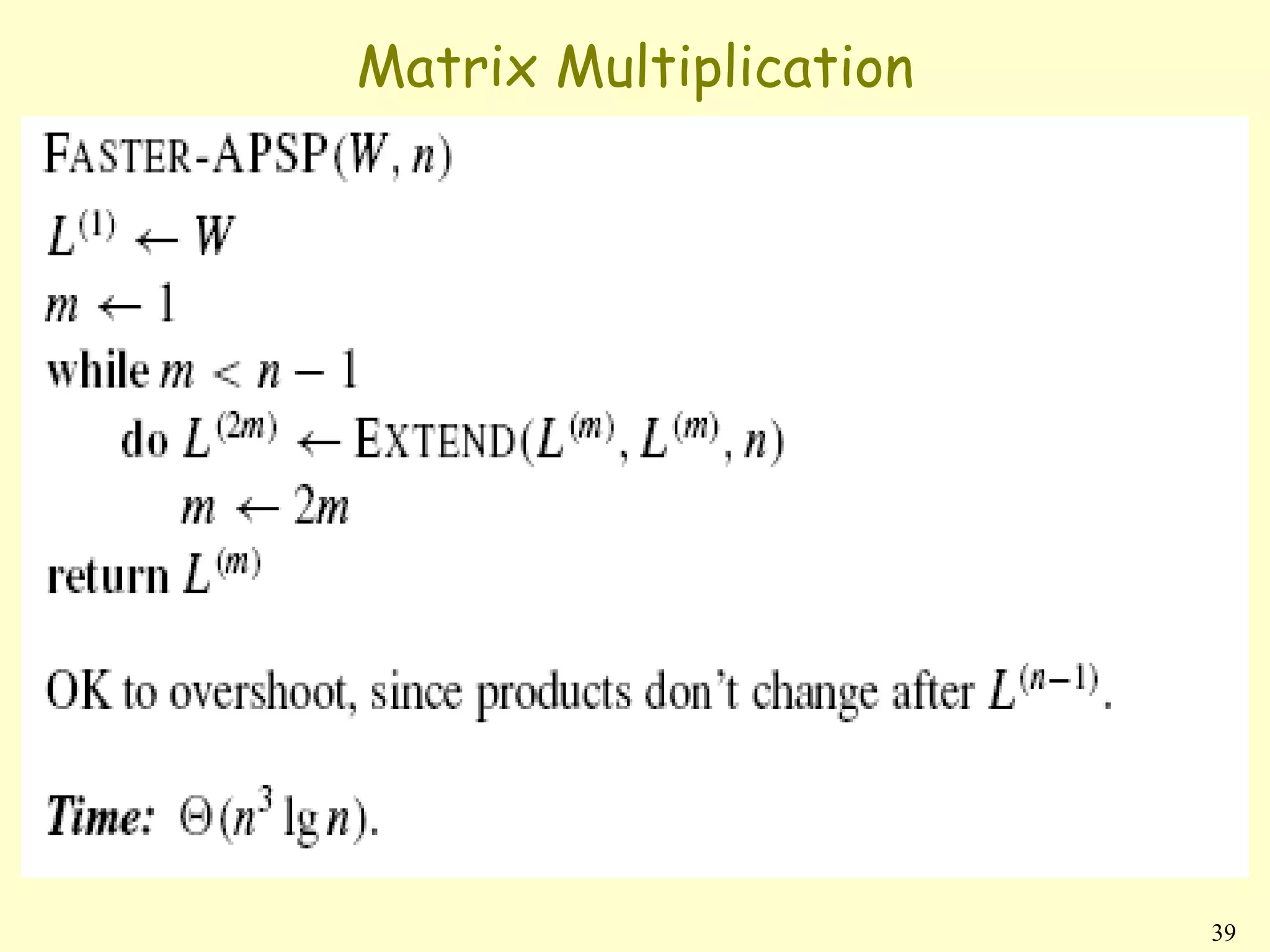
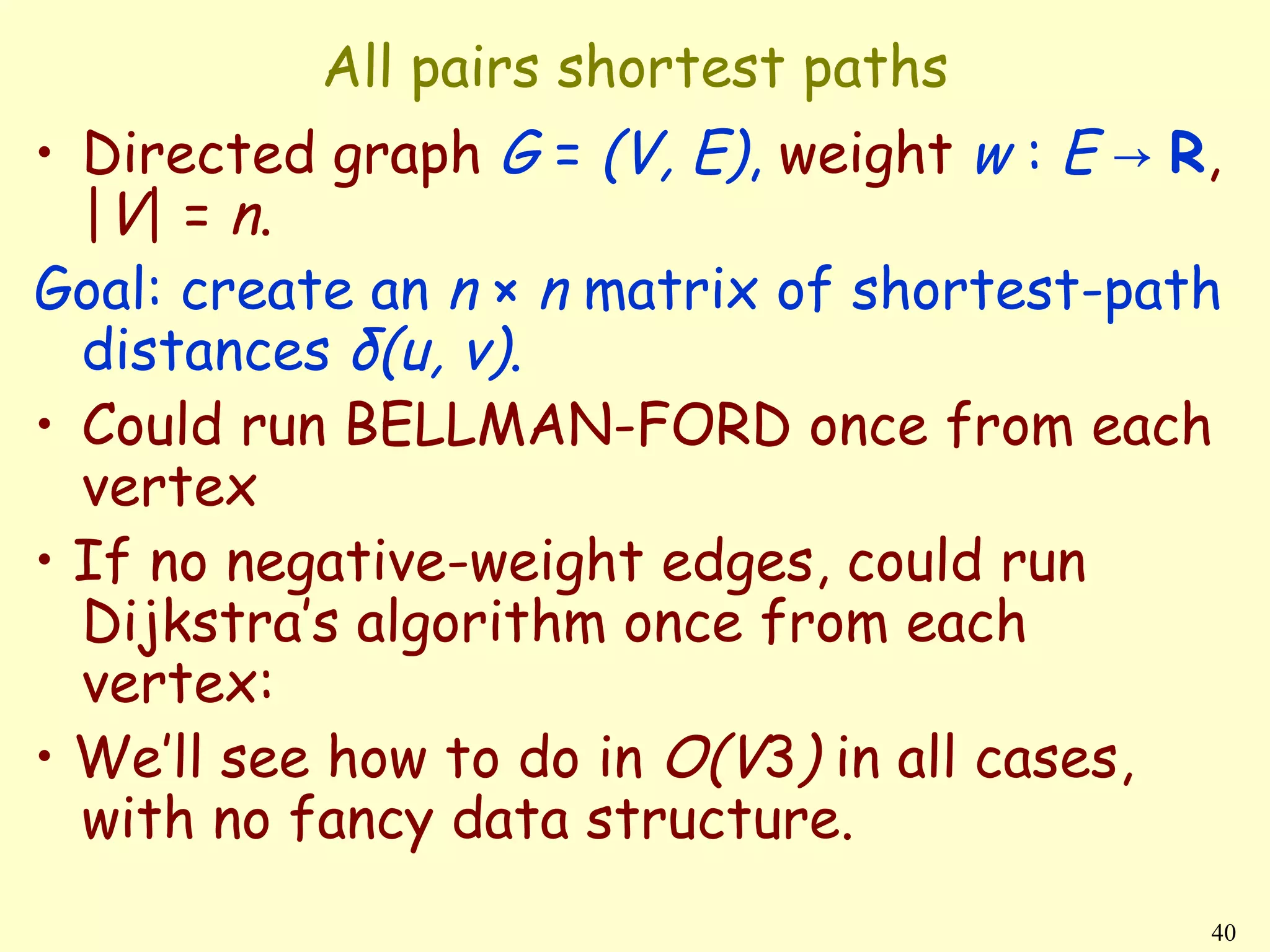
The document discusses shortest path algorithms for graphs. It defines different variants of shortest path problems like single-source, single-destination, and all-pairs shortest paths. It presents algorithms like Bellman-Ford, Dijkstra's algorithm, and Floyd-Warshal algorithm to solve these problems. Bellman-Ford handles negative edge weights but has a higher time complexity of O(V^3) compared to Dijkstra's which only works for positive edges. Floyd-Warshal solves the all-pairs shortest paths problem in O(V^3) time using dynamic programming and matrix multiplication.
![Lemma 1)
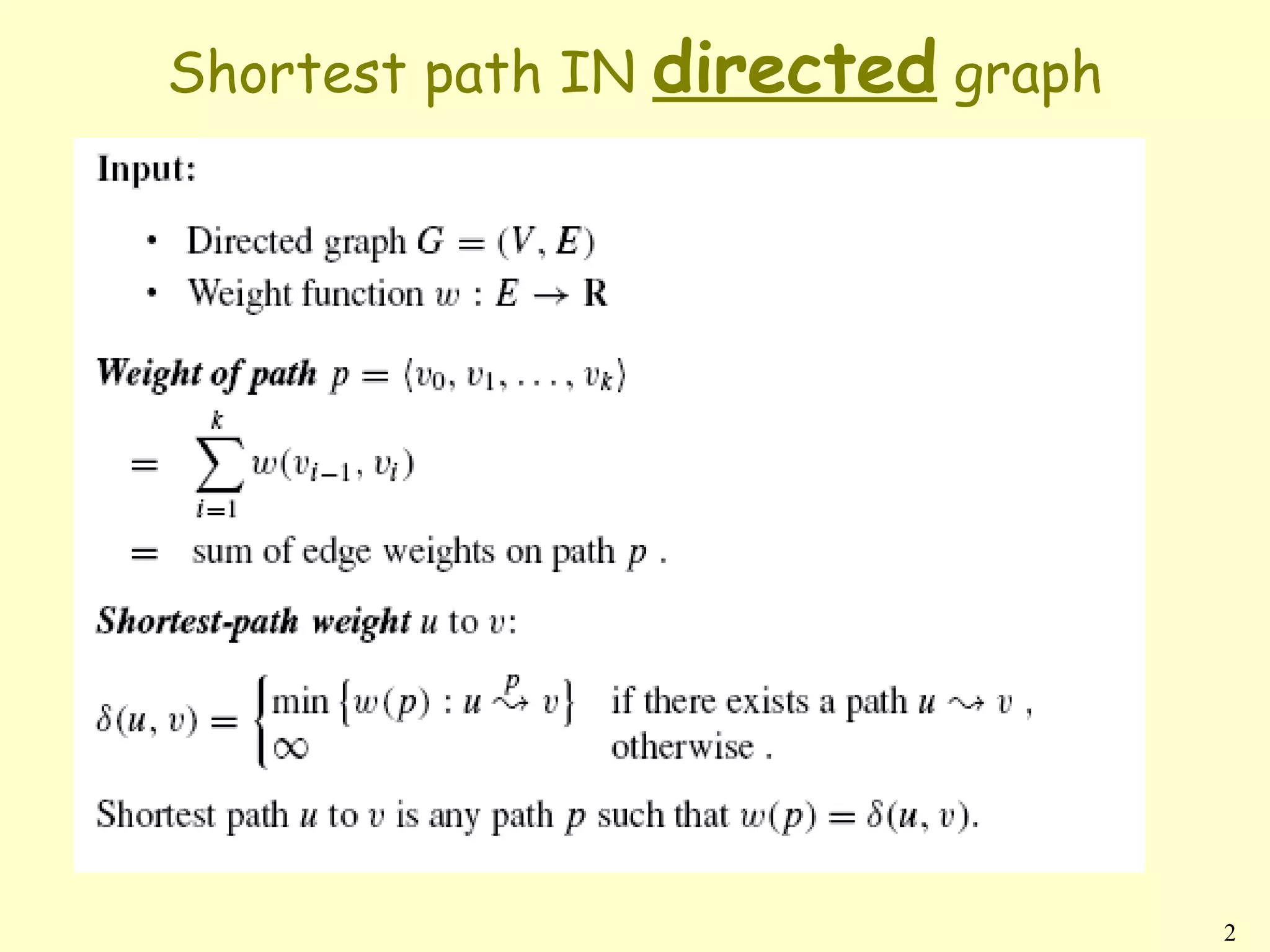
• Optimal substructure lemma: Any sub-path of
a shortest path is a shortest path.
• Shortest paths can’t contain cycles:
proofs: rather trivial.
• We use the d[v] array at all times
INIT-SINGLE-SOURCE(V, s)
{
for each v in V{
d[v]←∞
π[v] ← NIL
}
d[s] ← 0
}
6](https://image.slidesharecdn.com/lect14-120617042852-phpapp02/75/Inroduction_To_Algorithms_Lect14-6-2048.jpg)
![Relaxing
RELAX(u, v, w){
if d[v] > d[u] + w(u, v) then{
d[v] ← d[u] + w(u, v)
π[v]← u
}
}
For all the single-source shortest-paths
algorithms we’ll do the following:
• start by calling INIT-SINGLE-SOURCE,
• then relax edges.
The algorithms differ in the order and
how many times they relax each edge.
7](https://image.slidesharecdn.com/lect14-120617042852-phpapp02/75/Inroduction_To_Algorithms_Lect14-7-2048.jpg)
![Lemma 3) Upper-bound property
1) Always have d[v] ≥ δ(s, v) for all v.
2) Once d[v] = δ(s, v), it never changes.
Proof Initially true.
• Suppose there exists a vertex such that
d[v] < δ(s, v). Without loss of generality, v is first
vertex for which this happens.
• Let u be the vertex that causes d[v] to change.
Then d[v] = d[u] + w(u, v).
So, d[v] < δ(s, v)
≤ δ(s, u) + w(u, v) (triangle inequality)
≤ d[u] + w(u, v) (v is first violation)
d[v] < d[u] + w(u, v) .
Contradicts d[v] = d[u] + w(u, v).
9](https://image.slidesharecdn.com/lect14-120617042852-phpapp02/75/Inroduction_To_Algorithms_Lect14-9-2048.jpg)
![Lemma 4: Convergence property
If s ---> u → v is a shortest path and
d[u] = δ(s, u), and we call RELAX(u,v,w), then
d[v] = δ(s, v) afterward.
Proof: After relaxation:
d[v] ≤ d[u] + w(u, v) (RELAX code)
= δ(s, u) + w(u, v) (assumption)
= δ(s, v) (Optimal substructure lemma)
Since d[v] ≥ δ(s, v), must have d[v] = δ(s, v).
10](https://image.slidesharecdn.com/lect14-120617042852-phpapp02/75/Inroduction_To_Algorithms_Lect14-10-2048.jpg)
![(Lemma 5) Path relaxation property
Let p = v0, v1, . . . , vk be a shortest path from s = v0
to vk .
If we relax, in order, (v0, v1), (v1, v2), . . . , (Vk−1,
Vk), even intermixed with other relaxations,
then d[Vk ] = δ(s, Vk ).
Proof Induction to show that d[vi ] = δ(s, vi ) after
(vi−1, vi ) is relaxed.
Basis: i = 0. Initially, d[v0] = 0 = δ(s, v0) = δ(s, s).
Inductive step: Assume d[vi−1] = δ(s, vi−1). Relax
(vi−1, vi ). By convergence property, d[vi ] = δ(s,
vi ) afterward and d[vi ] never changes.
11](https://image.slidesharecdn.com/lect14-120617042852-phpapp02/75/Inroduction_To_Algorithms_Lect14-11-2048.jpg)
![The Bellman-Ford algorithm
• Allows negative-weight edges.
• Computes d[v] and π[v] for all v inV.
• Returns TRUE if no negative-weight cycles
reachable from s, FALSE otherwise.
12](https://image.slidesharecdn.com/lect14-120617042852-phpapp02/75/Inroduction_To_Algorithms_Lect14-12-2048.jpg)
![Bellman-ford
BELLMAN-FORD(V, E, w, s){
INIT-SINGLE-SOURCE(V, s)
for i ← 1 to |V| − 1
for each edge (u, v) in E
RELAX(u, v, w)
for each edge (u, v) in E
if d[v] > d[u] + w(u, v)
return FALSE
return TRUE
}
Time: O(V*E)= O(V^3) in the worst case.
13](https://image.slidesharecdn.com/lect14-120617042852-phpapp02/75/Inroduction_To_Algorithms_Lect14-13-2048.jpg)
![Correctness of Belman-Ford
Let v be reachable from s, and let p = {v0, v1, . . . , vk}
be a shortest path from s v,
where v0 = s and vk = v.
• Since p is acyclic, it has ≤ |V| − 1 edges, so k ≤|V|−1.
Each iteration of the for loop relaxes all edges:
• First iteration relaxes (v0, v1).
• Second iteration relaxes (v1, v2).
• kth iteration relaxes (vk−1, vk).
By the path-relaxation property,
d[v] = d[vk ] = δ(s, vk ) = δ(s, v).
14](https://image.slidesharecdn.com/lect14-120617042852-phpapp02/75/Inroduction_To_Algorithms_Lect14-14-2048.jpg)
![How about the TRUE/FALSE return value?
• Suppose there is no negative-weight cycle
reachable from s.
At termination, for all (u, v) in E,
d[v] = δ(s, v)
≤ δ(s, u) + w(u, v) (triangle inequality)
= d[u] + w(u, v) .
So BELLMAN-FORD returns TRUE.
15](https://image.slidesharecdn.com/lect14-120617042852-phpapp02/75/Inroduction_To_Algorithms_Lect14-15-2048.jpg)
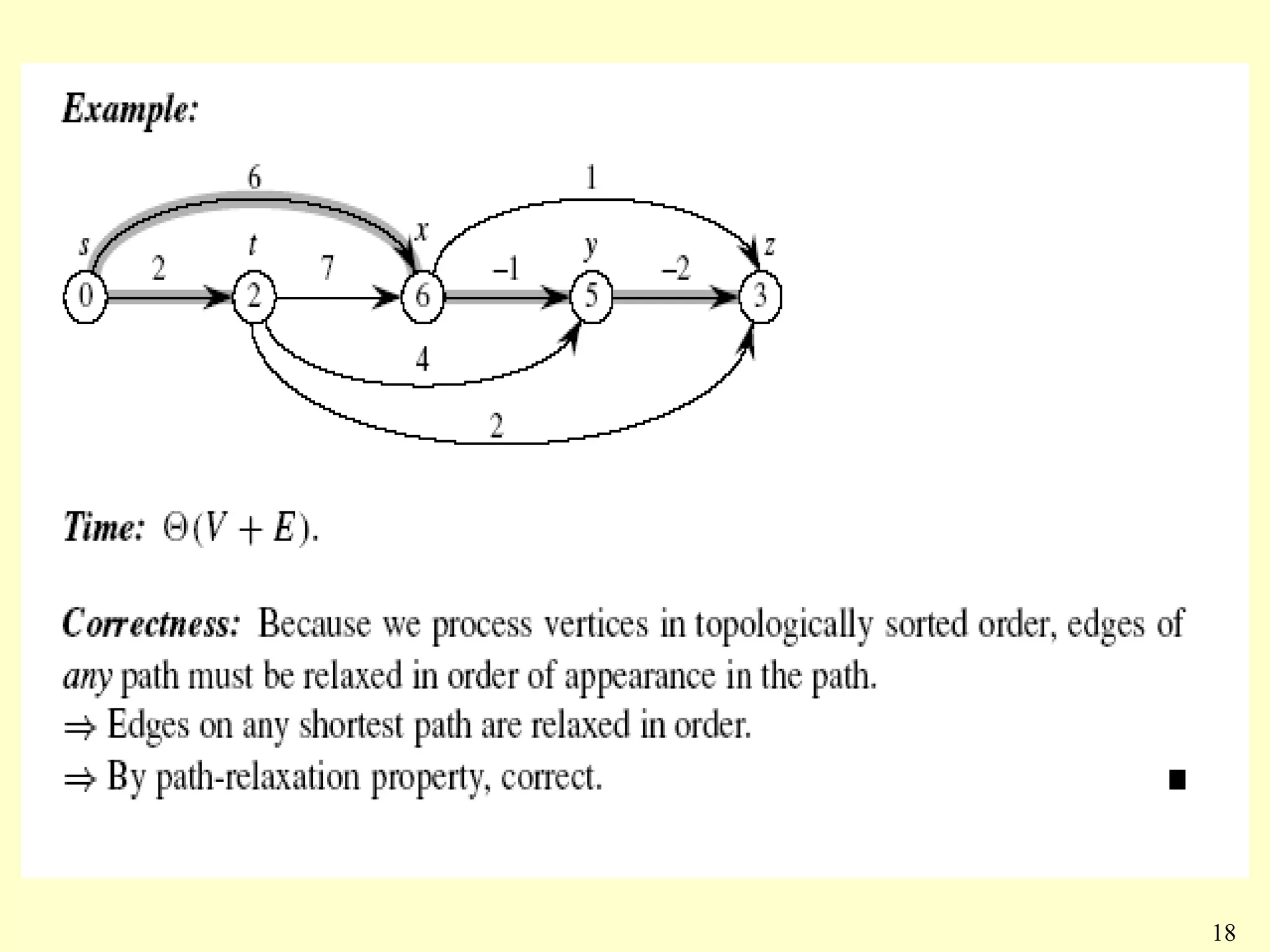
![Single-source shortest paths in a directed
acyclic graph
DAG-SHORTEST-PATHS(V, E, w, s)
{
topologically sort the vertices
INIT-SINGLE-SOURCE(V, s)
for each vertex u, in topologically order
for each vertex v in Adj[u]
RELAX(u, v, w)
}
17](https://image.slidesharecdn.com/lect14-120617042852-phpapp02/75/Inroduction_To_Algorithms_Lect14-17-2048.jpg)
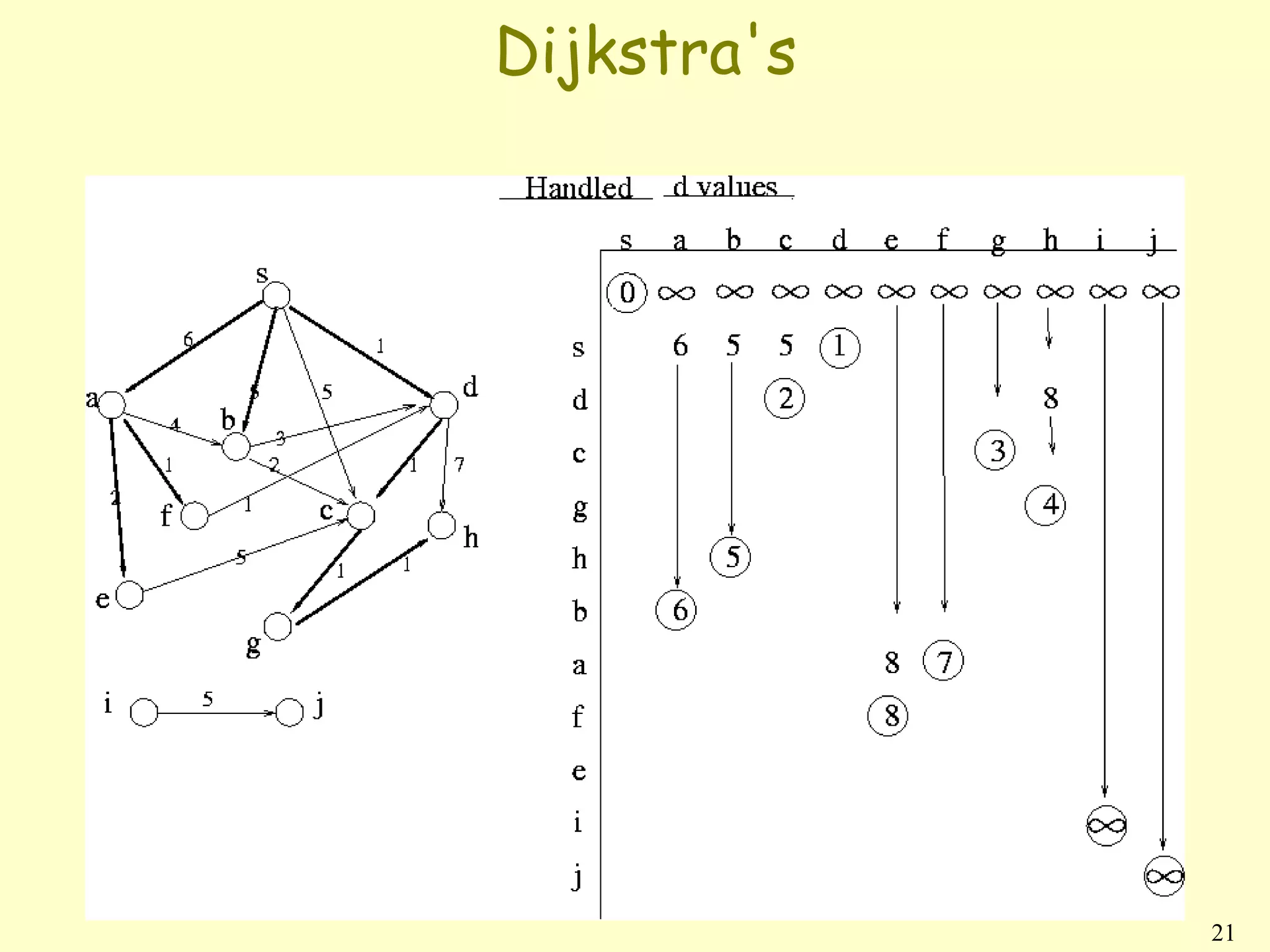
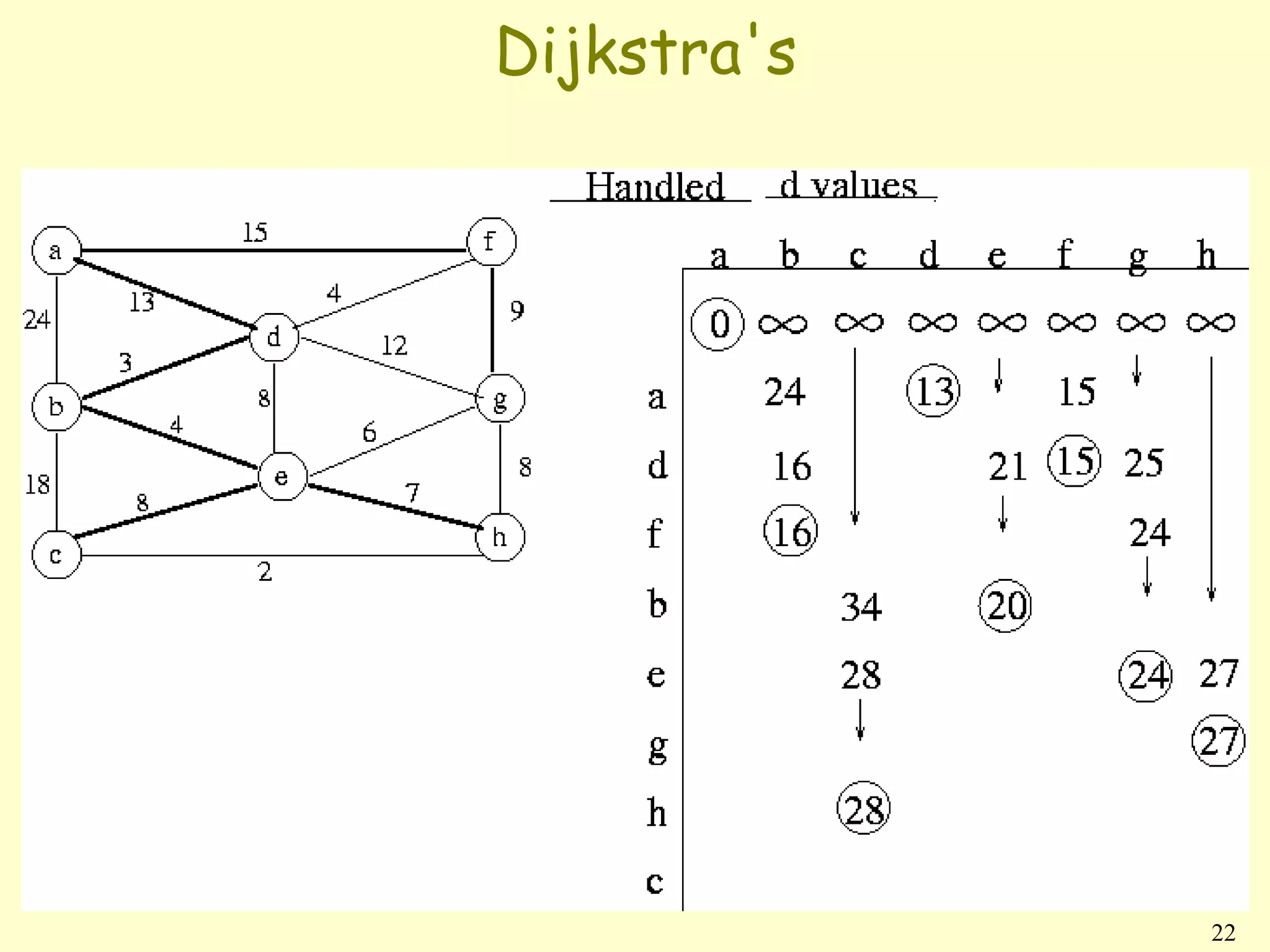
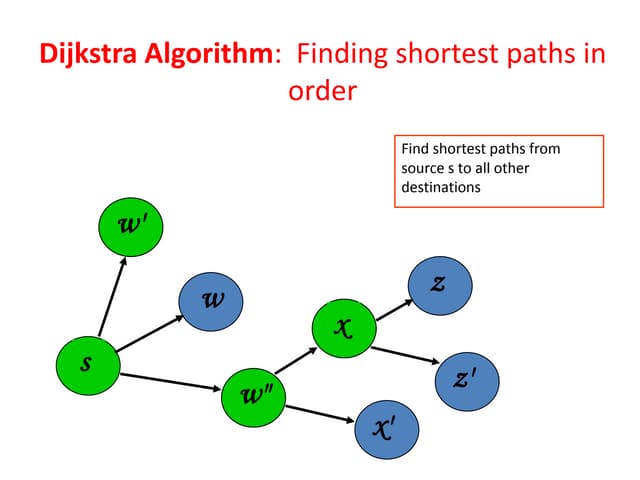
![Dijkstra’s algorithm
• No negative-weight edges.
• Essentially a weighted version of breadth-
first search.
• Instead of a FIFO queue, uses a priority
queue.
• Keys are shortest-path weights (d[v]).
• Have two sets of vertices:
S = vertices whose final shortest-path
weights are determined,
Q = priority queue = (was V − S. not
anymore)
19](https://image.slidesharecdn.com/lect14-120617042852-phpapp02/75/Inroduction_To_Algorithms_Lect14-19-2048.jpg)
![Dijkstra algorithm
DIJKSTRA(V, E, w, s){
INIT-SINGLE-SOURCE(V, s)
Q←s
while Q = ∅{
u ← EXTRACT-MIN(Q)
for each vertex v in Adj [u]{
if (d[v] == infinity){
RELAX(u,v,w); (d[v]=d[u]+w[u,v])
enqueue(v,Q)
}
elseif(v inside Q)
RELAX(u,v,w);
change priority(Q,v);
}
} 20](https://image.slidesharecdn.com/lect14-120617042852-phpapp02/75/Inroduction_To_Algorithms_Lect14-20-2048.jpg)