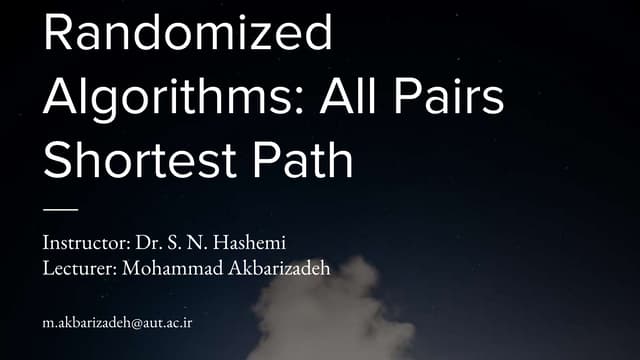
![Pseudo code
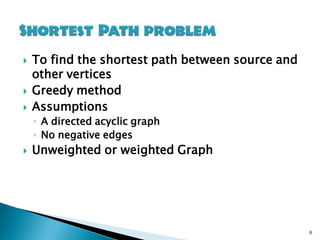
1. function Dijkstra (Graph, source):
2. for each vertex v in Graph: // Initializations
3. dist[v] := infinity // Unknown distance function from source to v
4. previous[v] := undefined // Previous node in optimal path from source
5. dist[source] := 0 // Distance from source to
source
6. Q := the set of all nodes in Graph // All nodes in the graph are unoptimized -
thus are in Q
7. while Q is not empty: // The main loop
8. u := vertex in Q with smallest dist[]
9. if dist[u] = infinity:
10. break // all remaining vertices are inaccessible from source
11. remove u from Q
12. for each neighbor v of u: // where v has not yet been removed from Q
13. alt := dist[u] + dist_between(u, v)
14. if alt < dist[v]: // Relax (u,v,a)
15. dist[v] := alt
16. previous[v] := u
17. return dist[]
Running time: O((n+|E|)log n)
10](https://image.slidesharecdn.com/allpair-130608044436-phpapp02/85/All-pairs-shortest-path-algorithm-10-320.jpg)
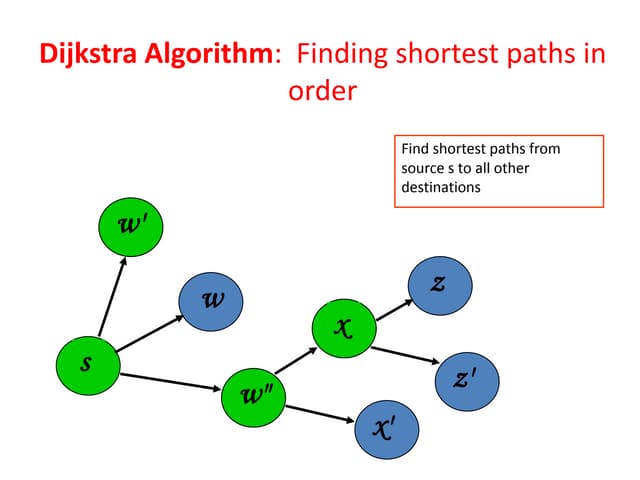
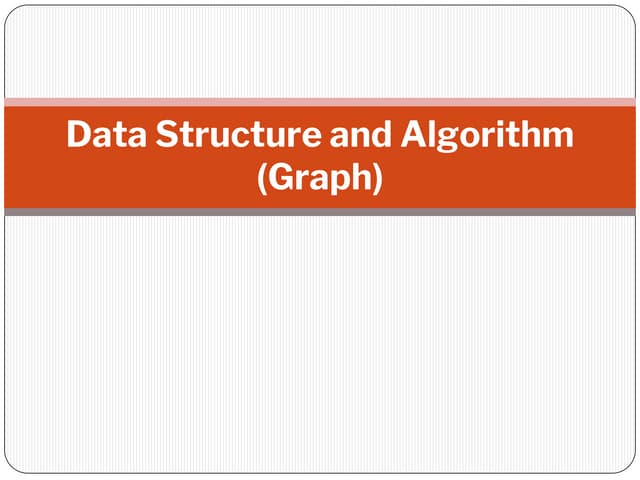
![All Pairs Shortest Path problem
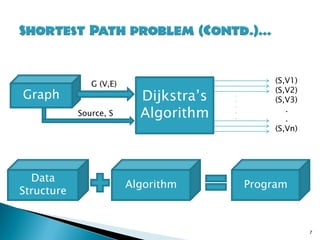
The all-pairs shortest path algorithm is to determine
a matrix A such that A(i, j) is the length of the
shortest path between i and j.
Input given as a matrix form
Output is an nXn matrix D = [dij] where dij is the
shortest path from vertex i to j.
Wij =
0, if i=j
W(i, j), if (i,j) ε E
∞, if (i,j) ε E
15](https://image.slidesharecdn.com/allpair-130608044436-phpapp02/85/All-pairs-shortest-path-algorithm-15-320.jpg)
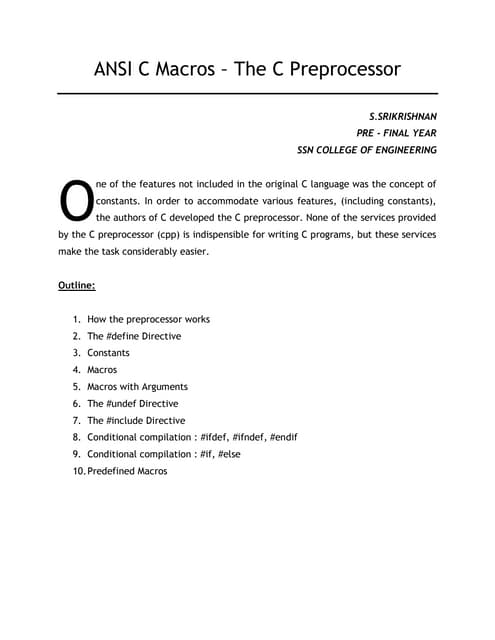
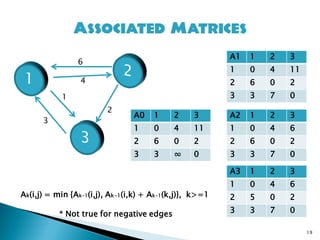
![18
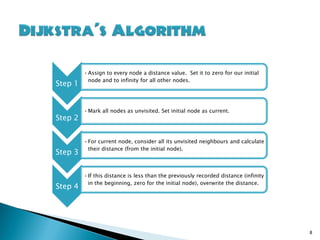
Solution 2
To find the shortest path from i to j (i!=j)
Assume some intermediate vertex k (or no
vertices also)
The shortest path from i to j is the shortest
path from [(i,k) + (k,j) or i to j ] which ever is
shorter.
We use associated matrices and its powers to
calculate the shortest path from i to k and also
k to j.
Matrix obtained in O(n.n.n)](https://image.slidesharecdn.com/allpair-130608044436-phpapp02/85/All-pairs-shortest-path-algorithm-18-320.jpg)
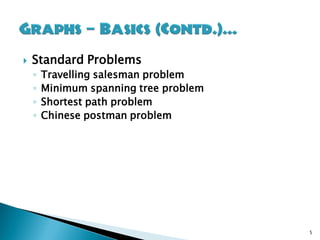
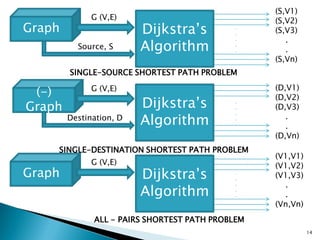
![20
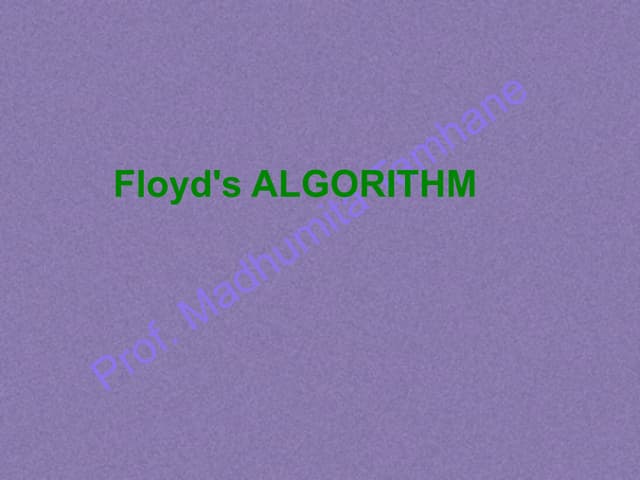
Pseudo Code
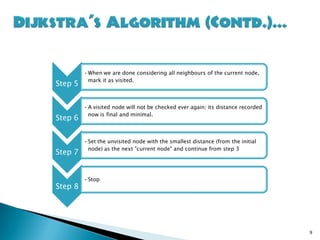
1. algorithm allpairs (cost, A, n):
2. //cost[1:n, 1:n] is the cost adjacency matrix of a graph with n
vertices
3. //A[i,j] is the cost of a shortest path from vertex i toj .
4. //cost[i,i] = 0 for 1<=i<=n.
5. {
6. for(i=0;i<n;i++)
7. for(j=0;j<n;j++)
8. A[i][j]=cost[i][j] //copy cost into A
9. for(k=0;k<n;k++)
10. for(i=0;i<n;i++)
11. for(j=0;j<n;j++)
12. A[i,j] = min { A[i,j] , A[i,k] + A[k,j] };
13. }](https://image.slidesharecdn.com/allpair-130608044436-phpapp02/85/All-pairs-shortest-path-algorithm-20-320.jpg)


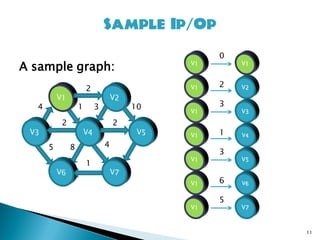
This document describes Floyd's algorithm for solving the all-pairs shortest path problem in graphs. It begins with an introduction and problem statement. It then describes Dijkstra's algorithm as a greedy method for finding single-source shortest paths. It discusses graph representations and traversal methods. Finally, it provides pseudocode and analysis for Floyd's dynamic programming algorithm, which finds shortest paths between all pairs of vertices in O(n3) time.