Downloaded 23 times











![Solution (Cont’d) M1 has two springs, two viscous dampers, and mass associated with its motion.
There is one spring between M1 and M2, and one viscous damper between M1 and M3. Thus, the
equation of motion for M1 is
[M1s2 + ( fv1 + fv3 )s +(K1 + K2)]X1(s) −K2X2(s) − fv3 sX3(s) = 0
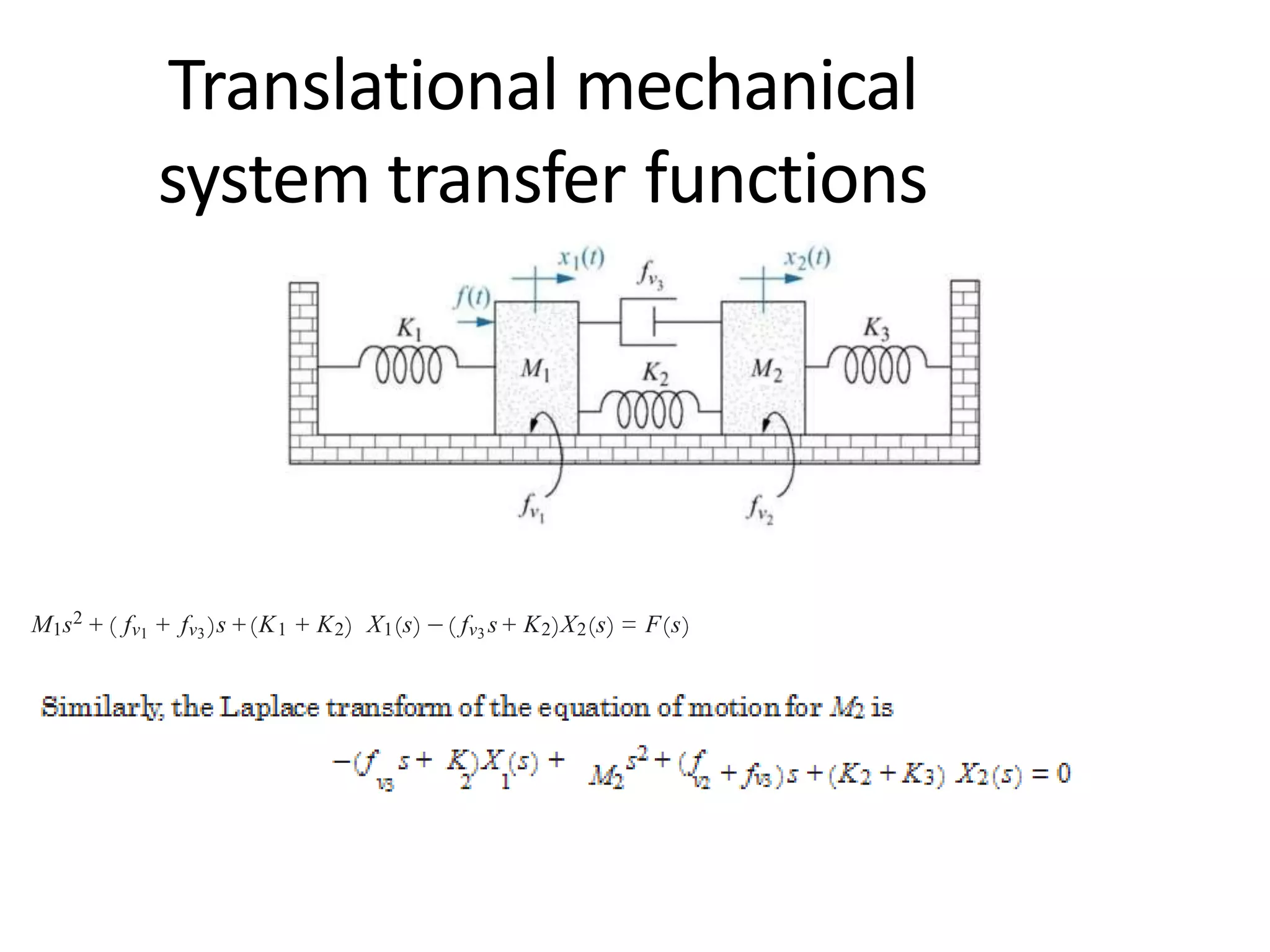
Similarly, the equations of motion for M2 and M3 are
−K2X1(s)+[M2s2 + ( fv2 + fv4 )s + K2]X2(s) − fv4 sX3(s) = F(s)
−fv3 sX1(s) − fv4 sX2(s) +[M3s2 + ( fv3 + fv4 )s]X3(s) = 0
.](https://image.slidesharecdn.com/10-210203075851/75/modeling-of-MECHANICAL-system-translational-Basic-Elements-Modeling-Spring-K-Damper-D-Mass-M-Solved-Examples-with-KDM-23-2048.jpg)

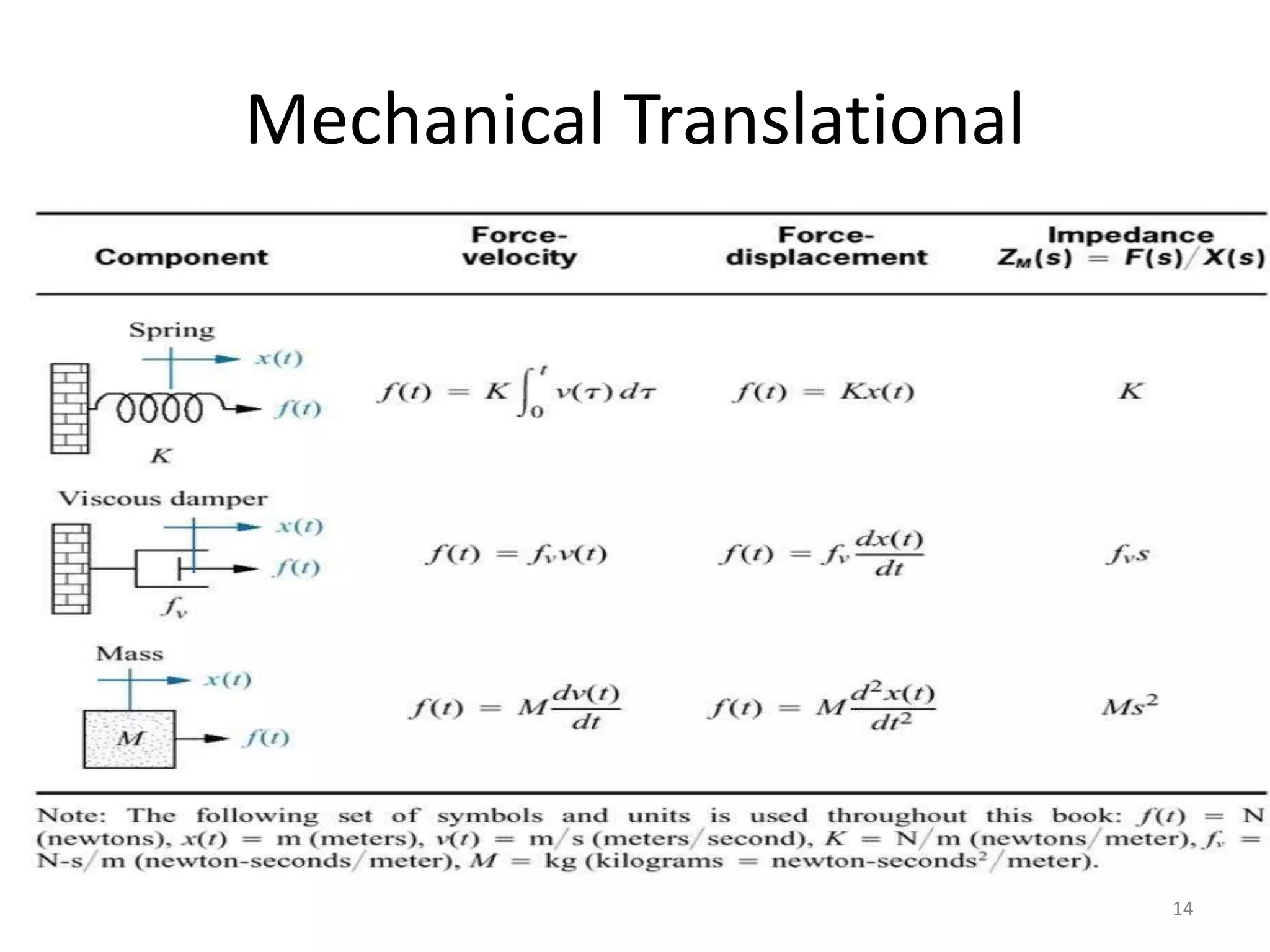
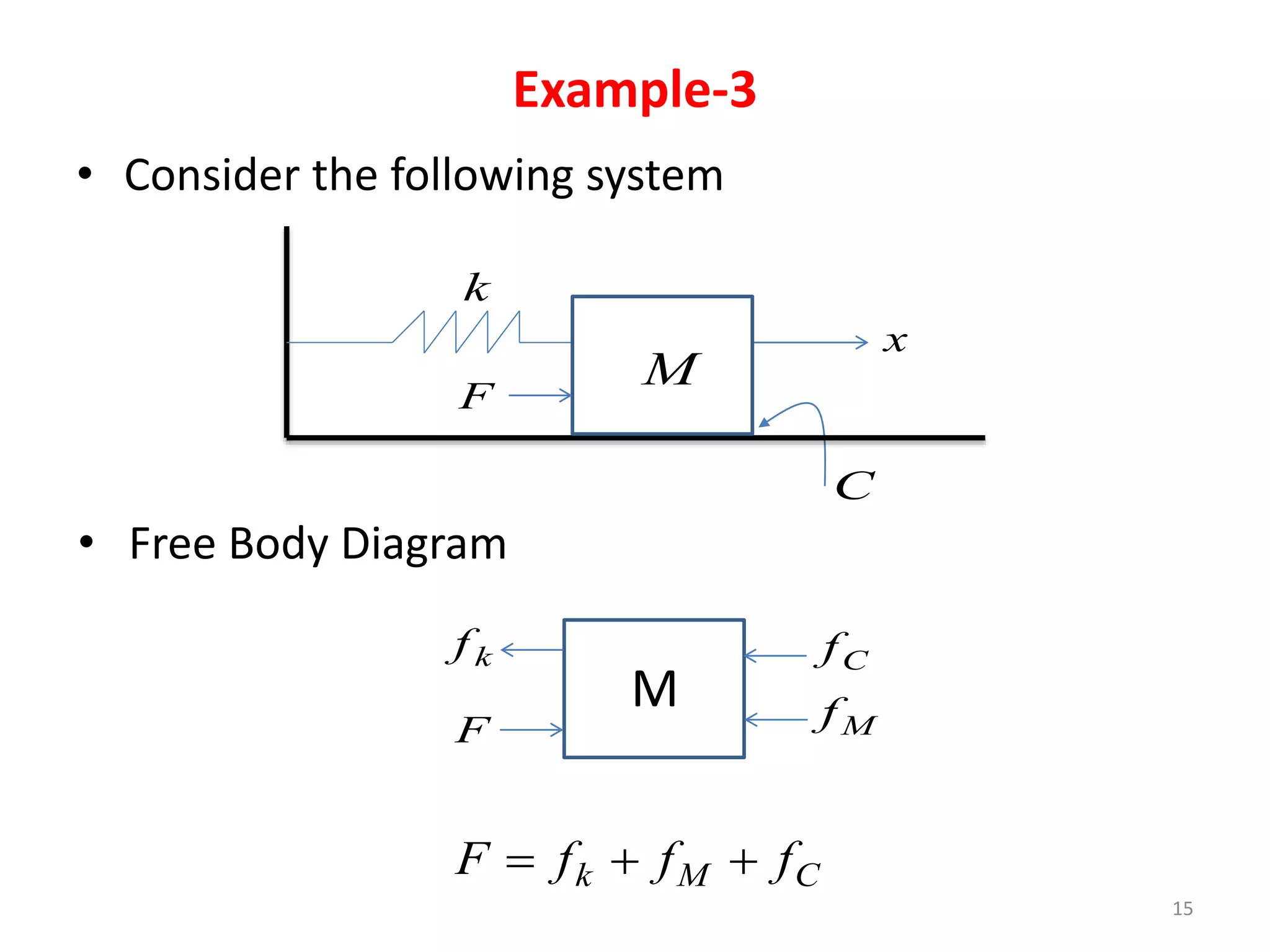
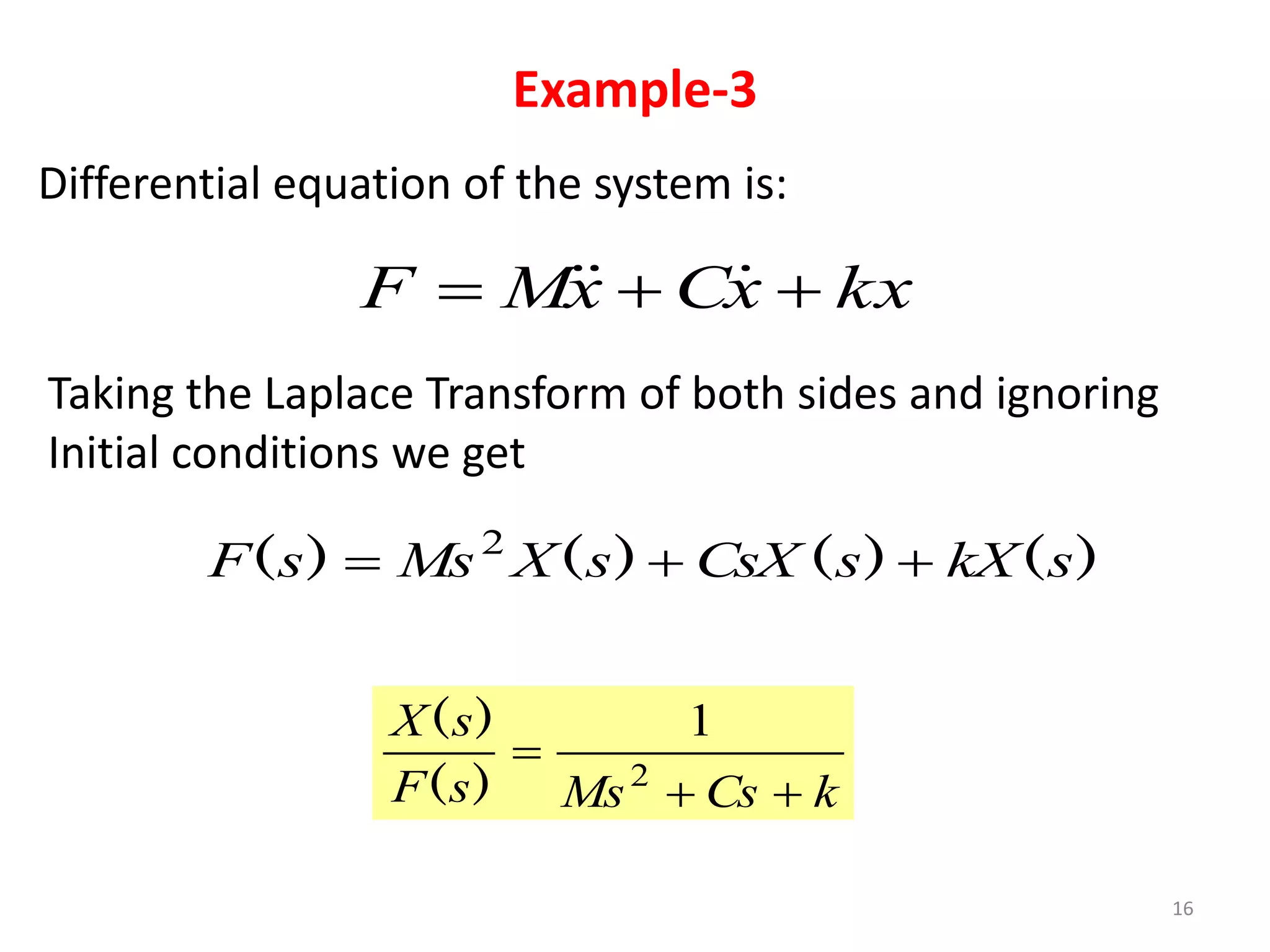
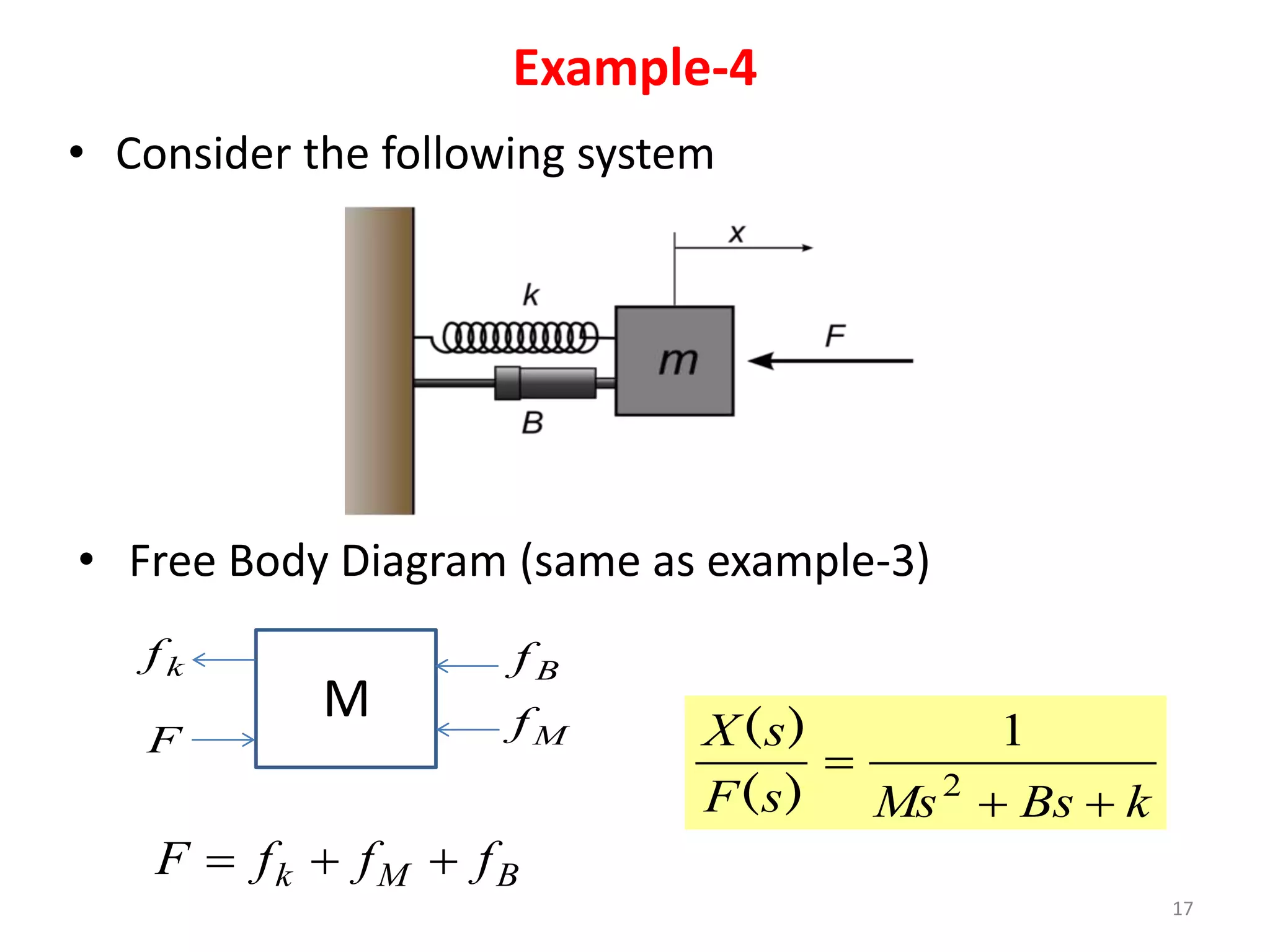
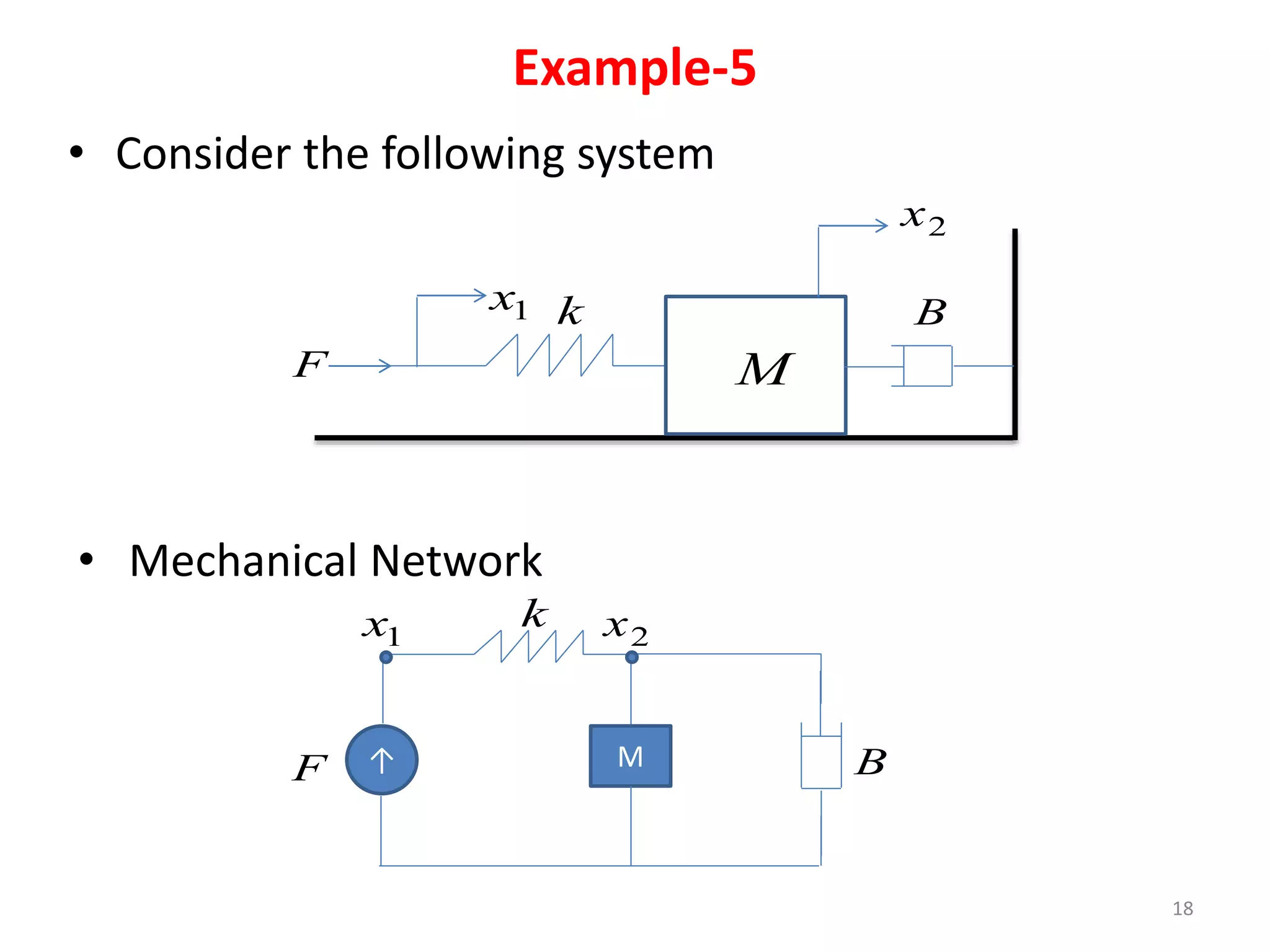
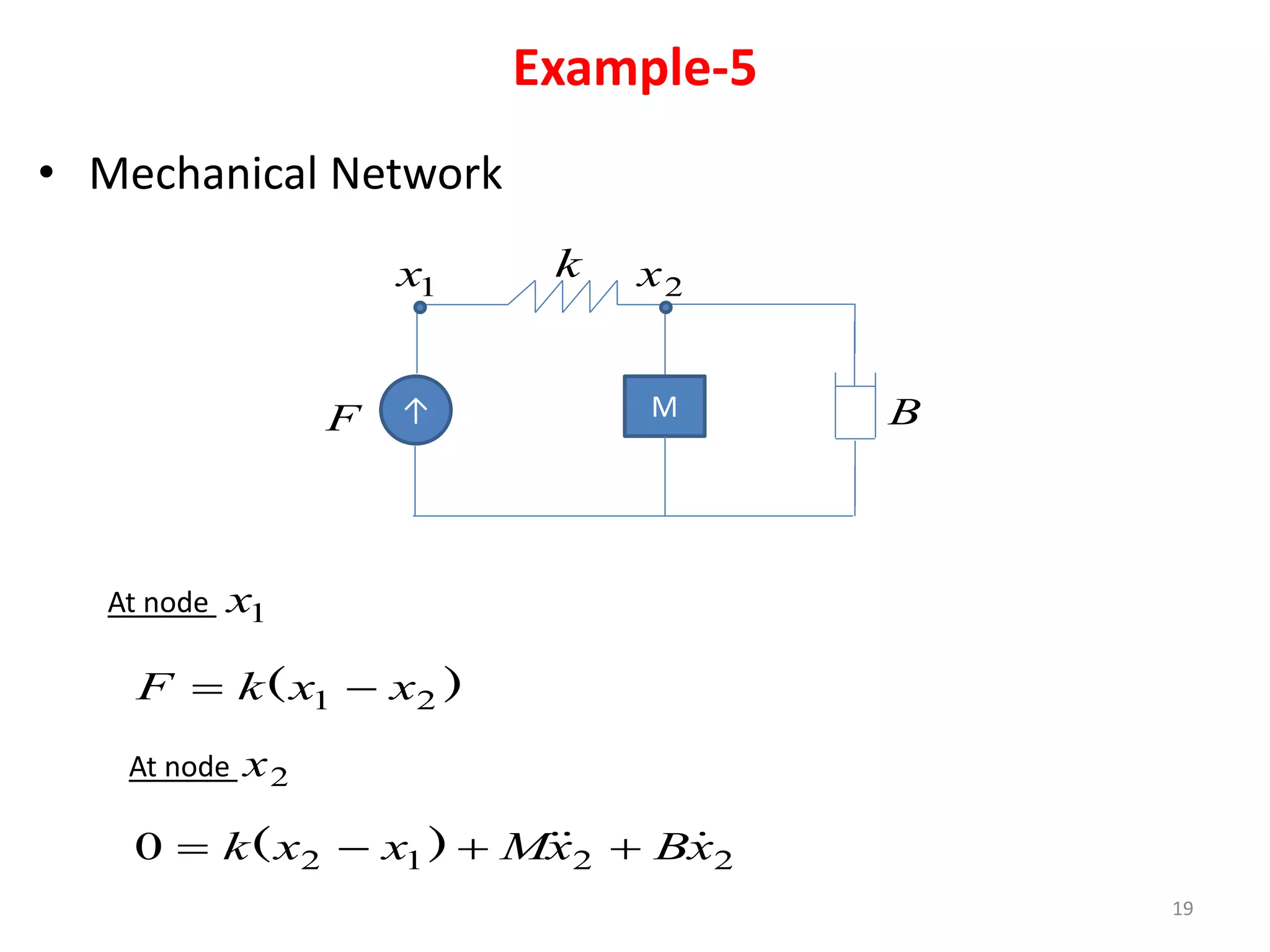
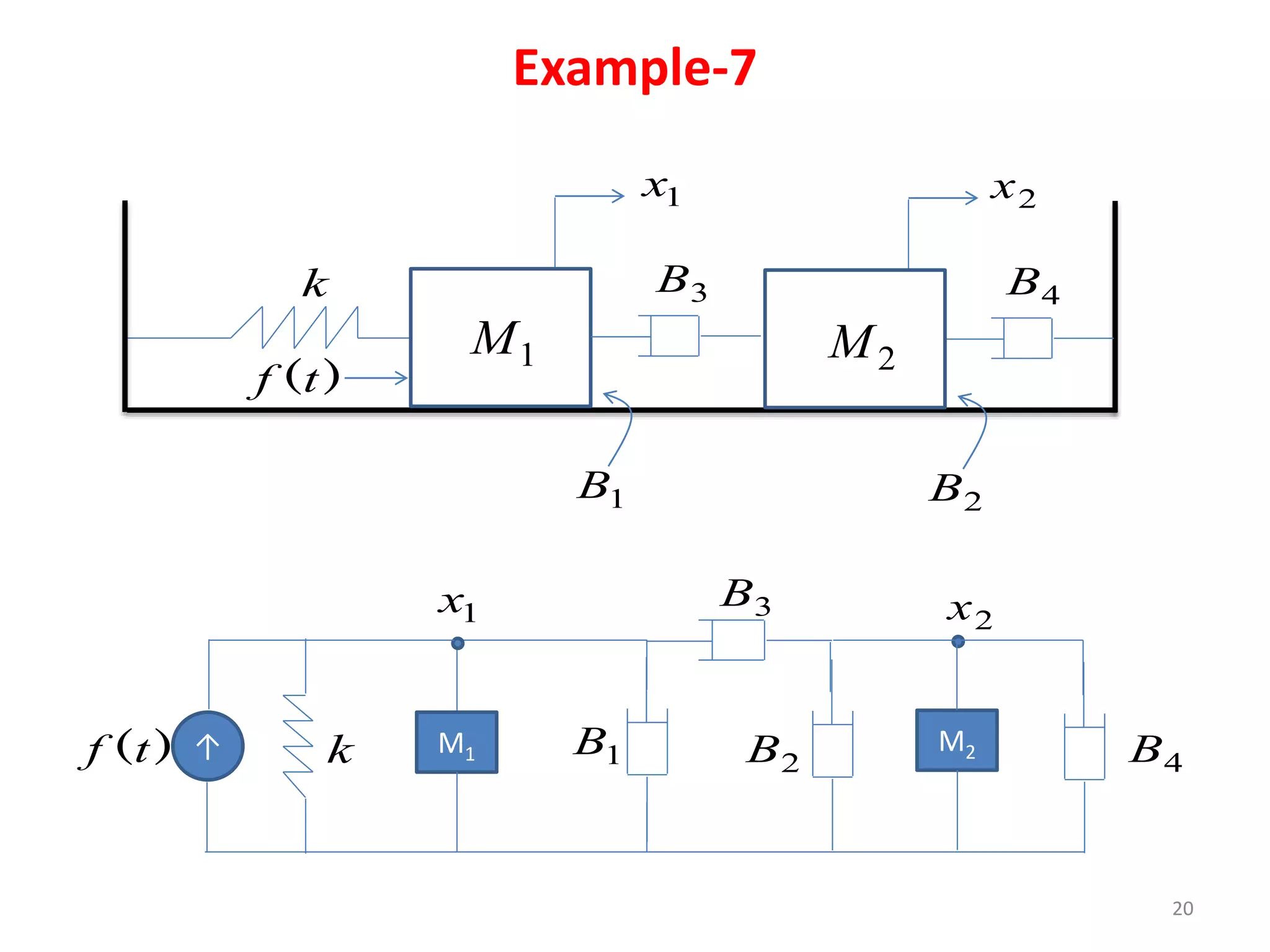
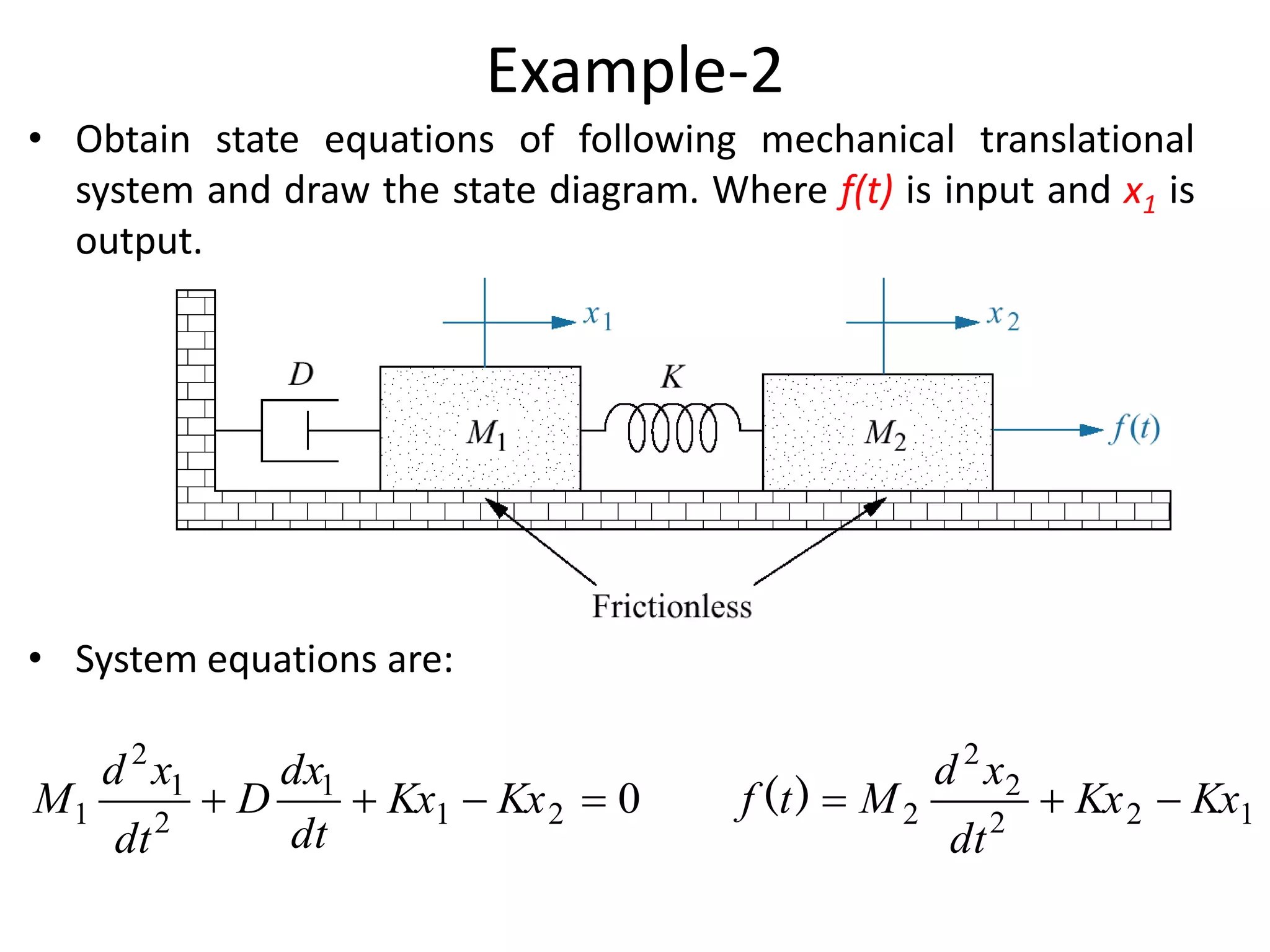
This document summarizes modeling of mechanical translational systems. It discusses modeling basic elements like springs, masses, and dampers and provides their equations of motion. Examples are given of modeling multiple springs, masses and dampers connected together in different configurations. The state equations and state diagram are obtained for a sample mechanical translational system with multiple springs and dampers connecting different masses.