Download to read offline


The document explains sensors as devices that convert physical parameters into signals for processing, highlighting their essential role in automation across various applications. It outlines criteria for sensor selection and categorizes them into types, including environmental and motion sensors with specific examples like temperature and humidity sensors. Additionally, it provides basic instructions for interfacing and programming these sensors with microcontrollers.
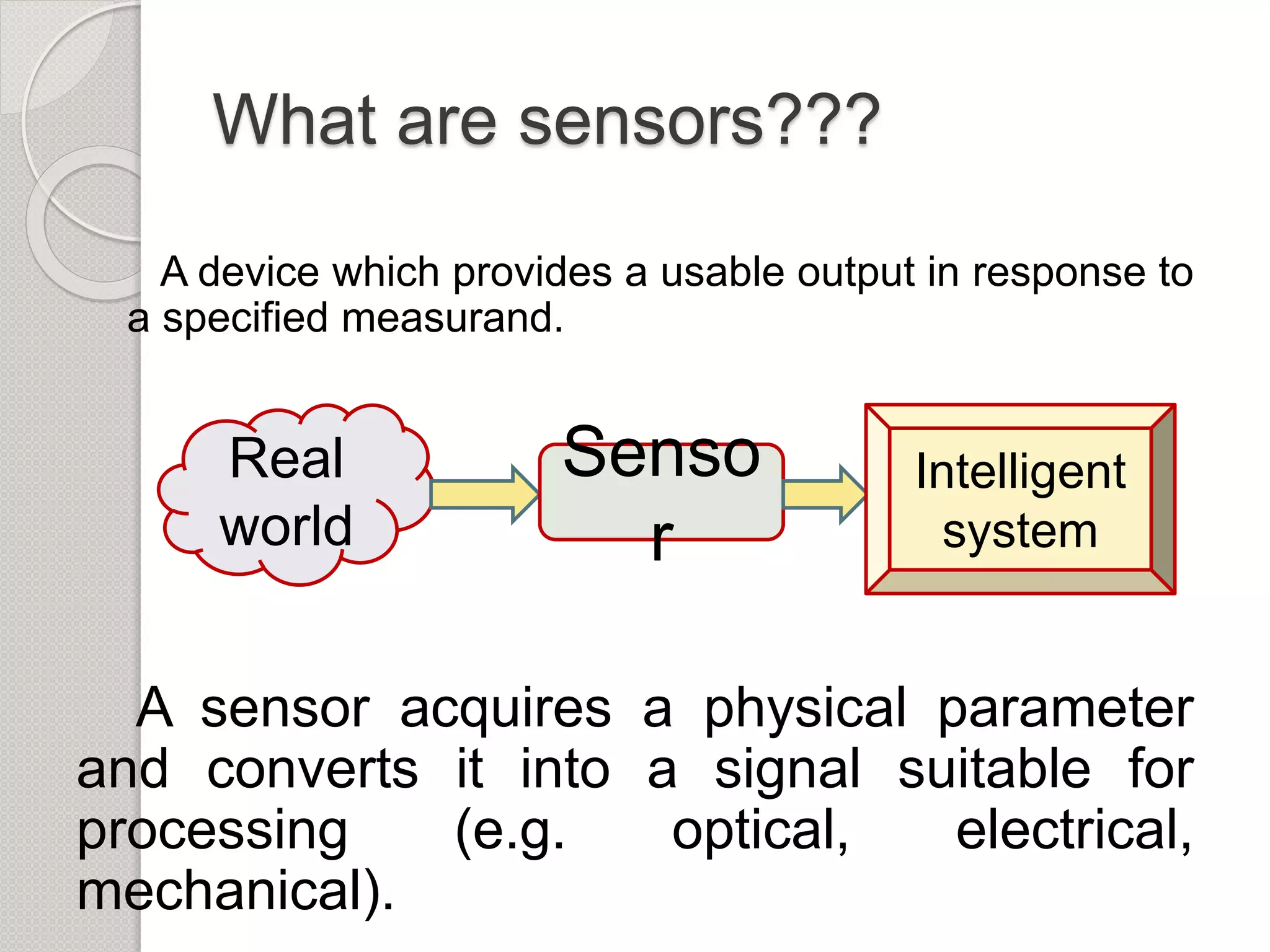
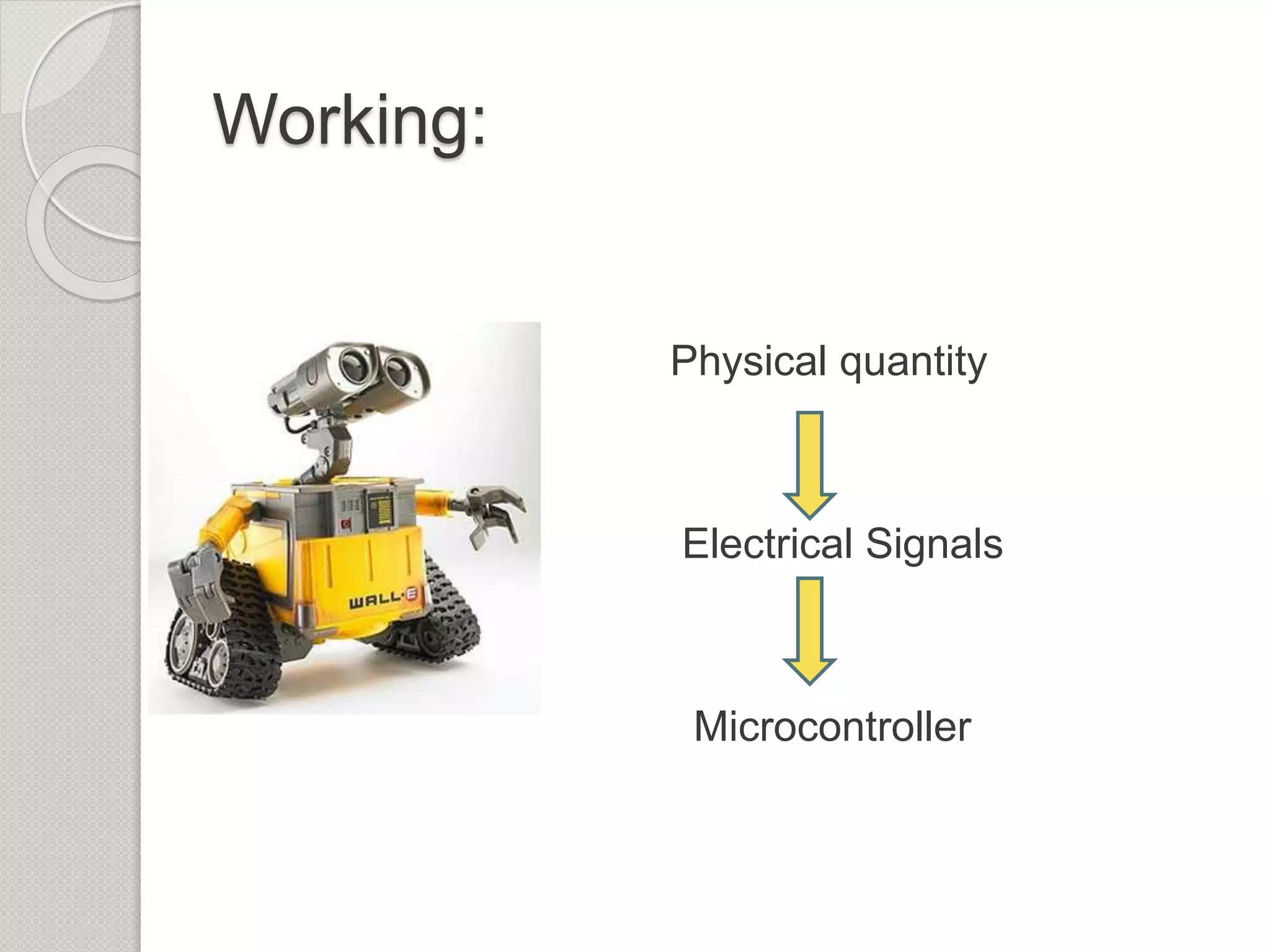
Definition of sensors as devices that convert physical parameters into usable signals; overview of working with physical quantities and electrical signals.
Emphasizes the ubiquity of sensors in automation across various applications; discusses criteria for selecting sensors and types such as environmental and motion sensors.
Details on specific types of environmental sensors: temperature, pressure, and humidity sensors with their roles in monitoring and control systems.
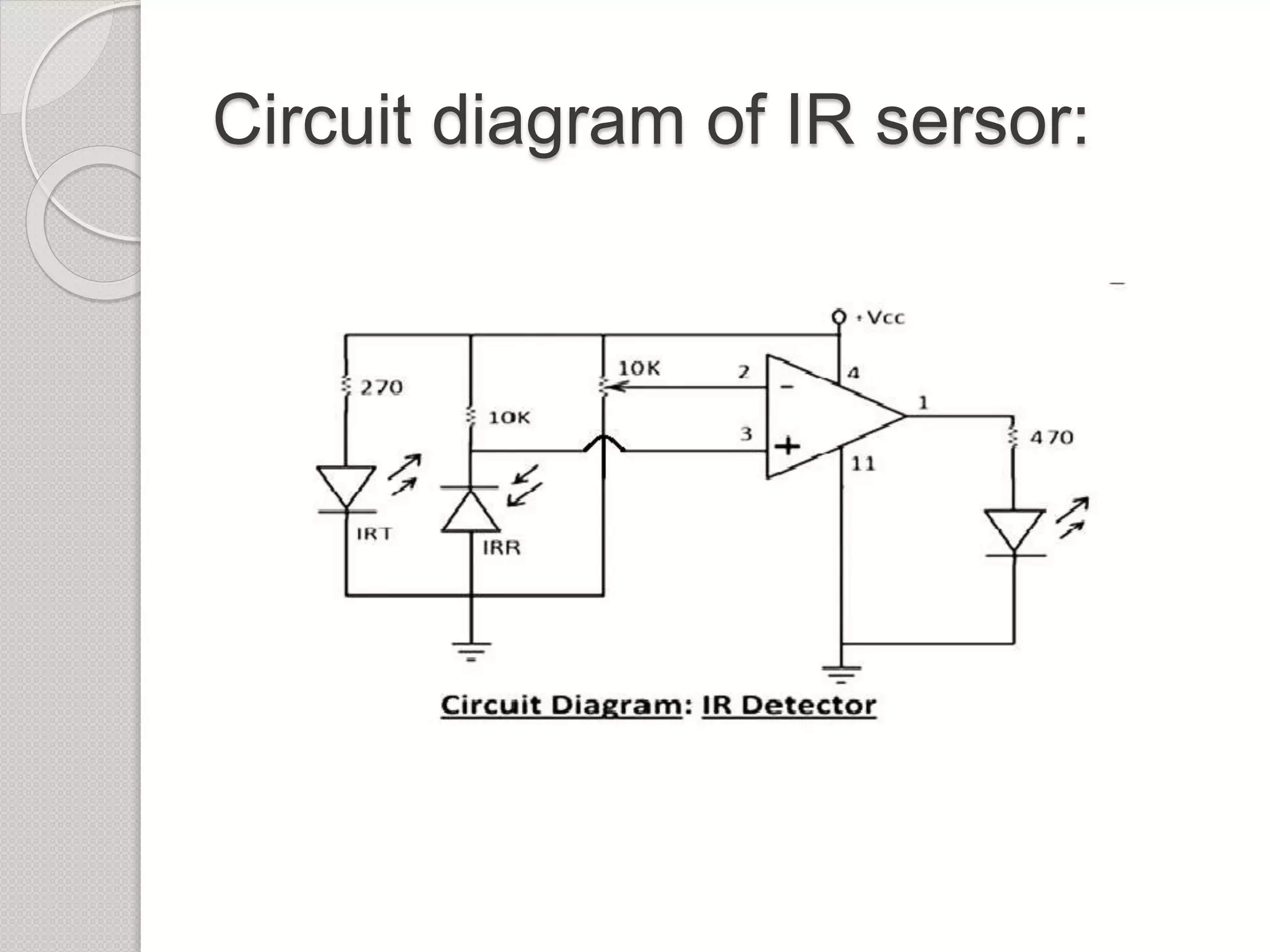
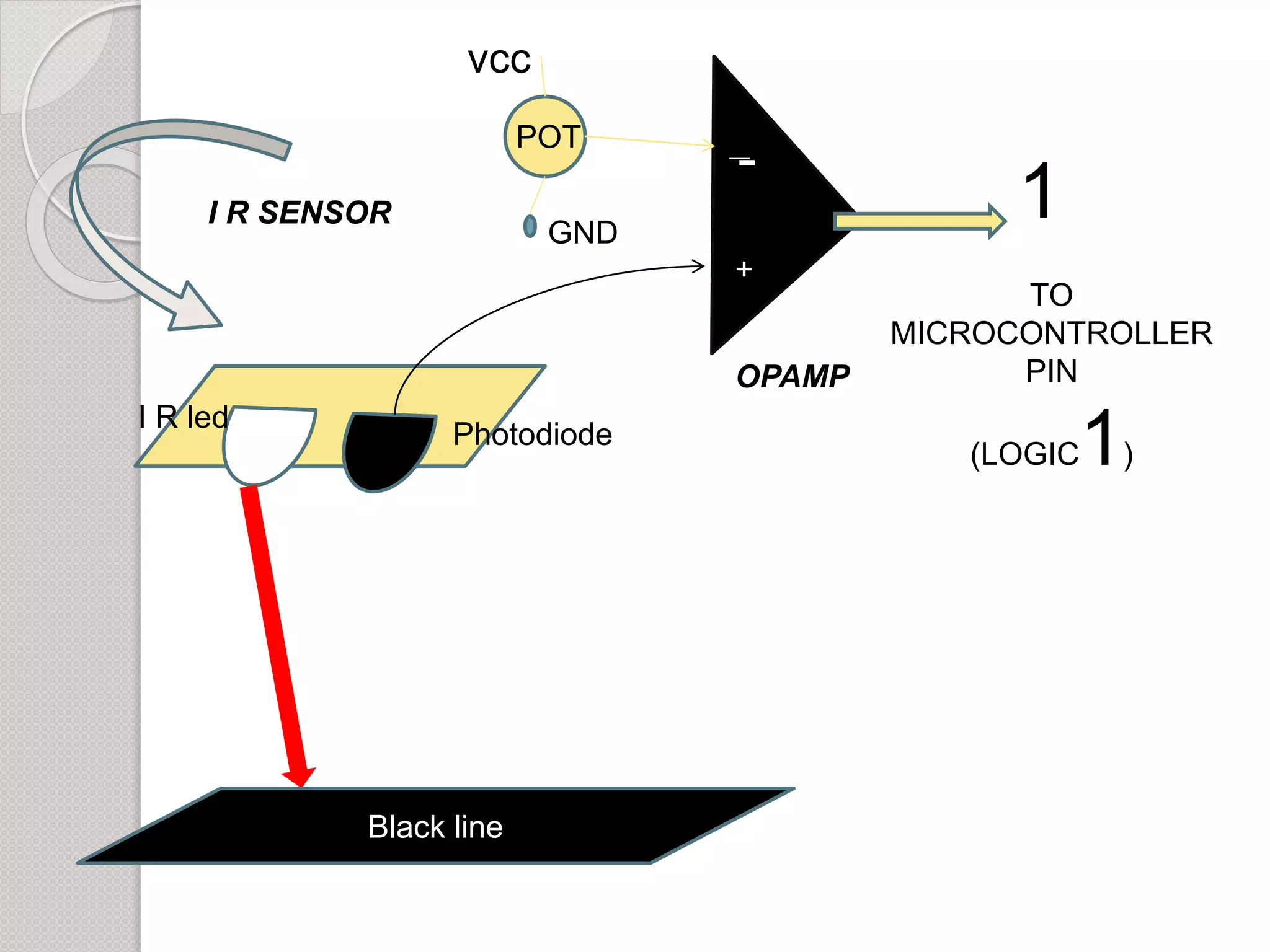
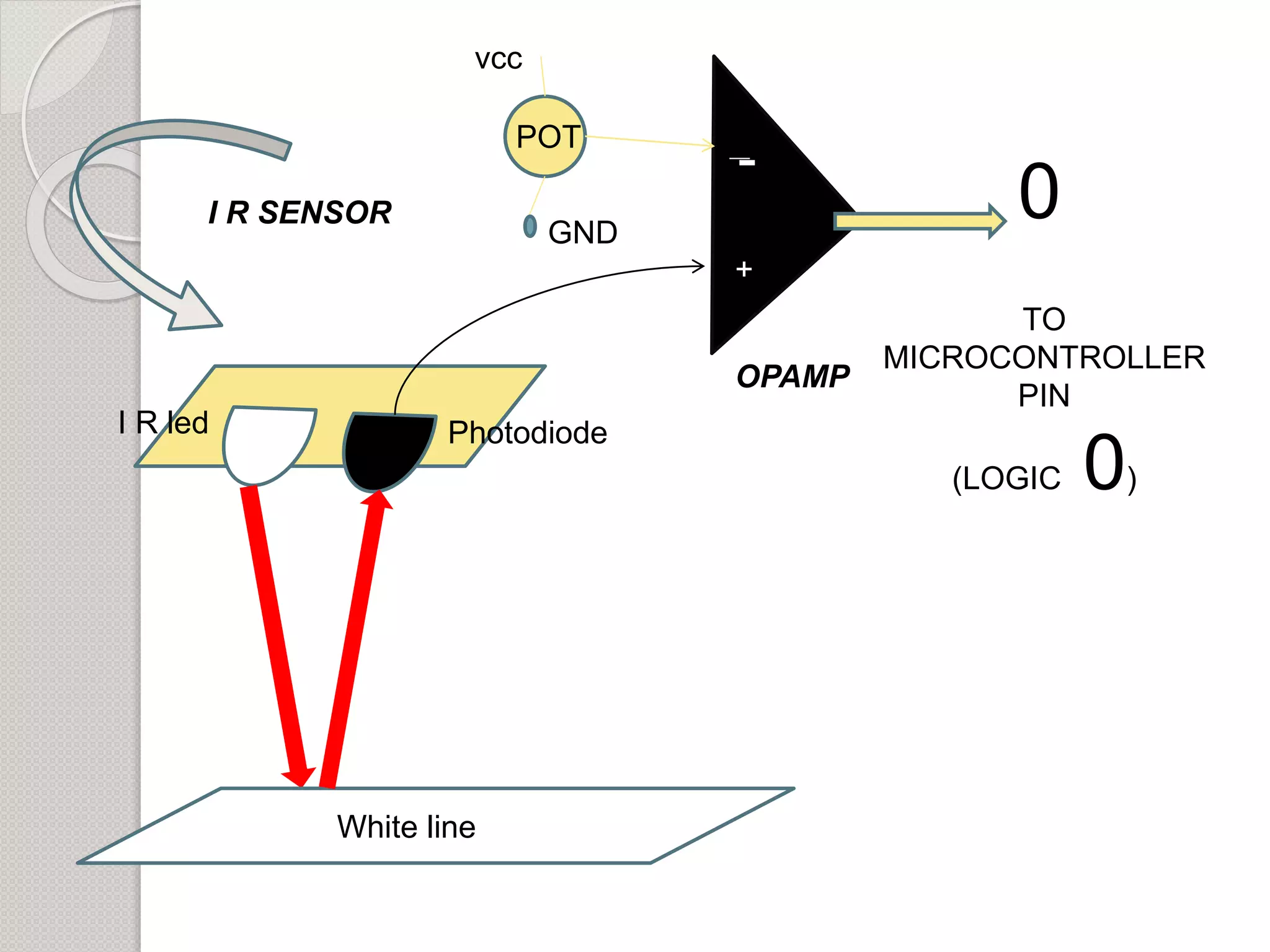
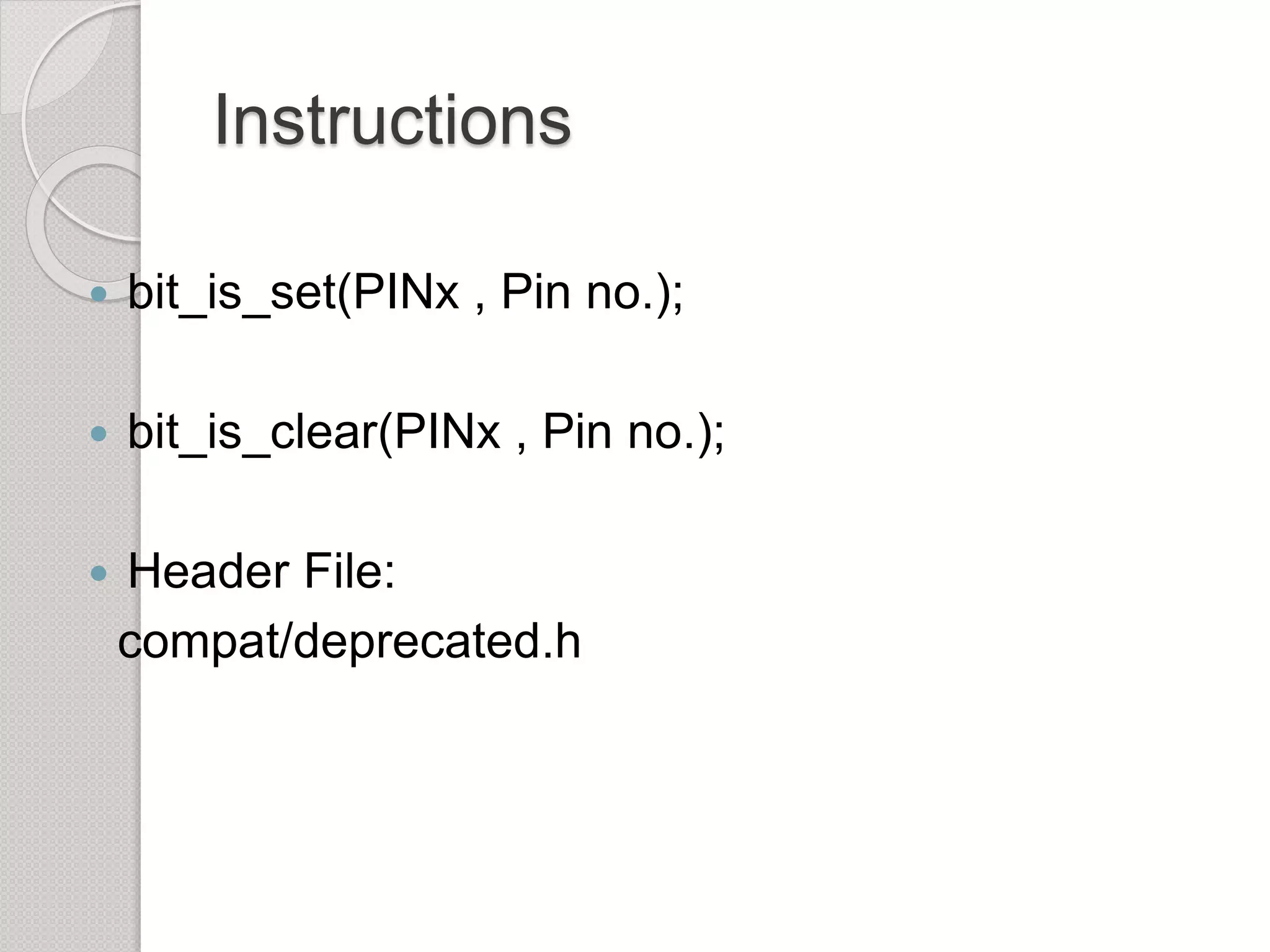
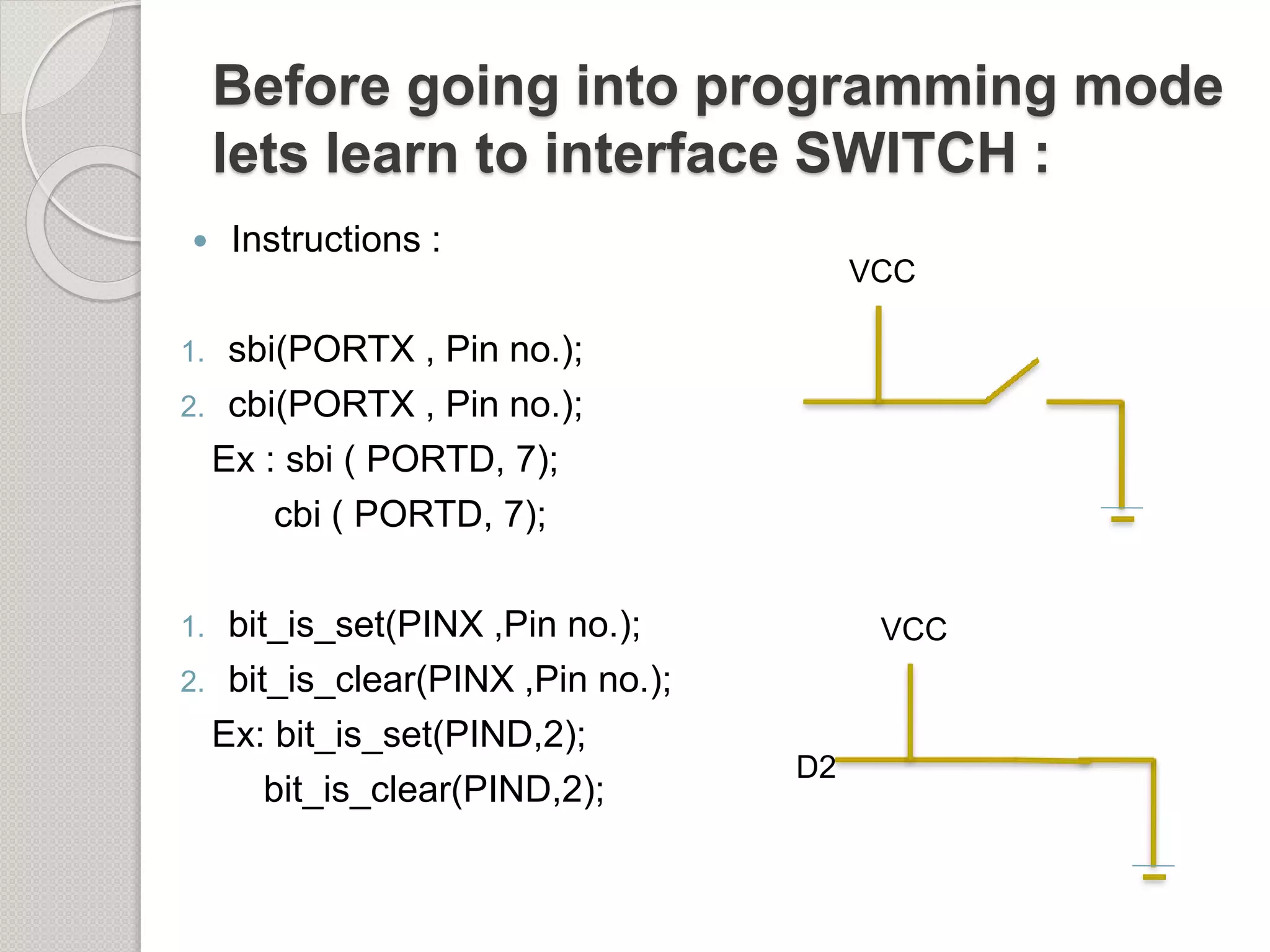
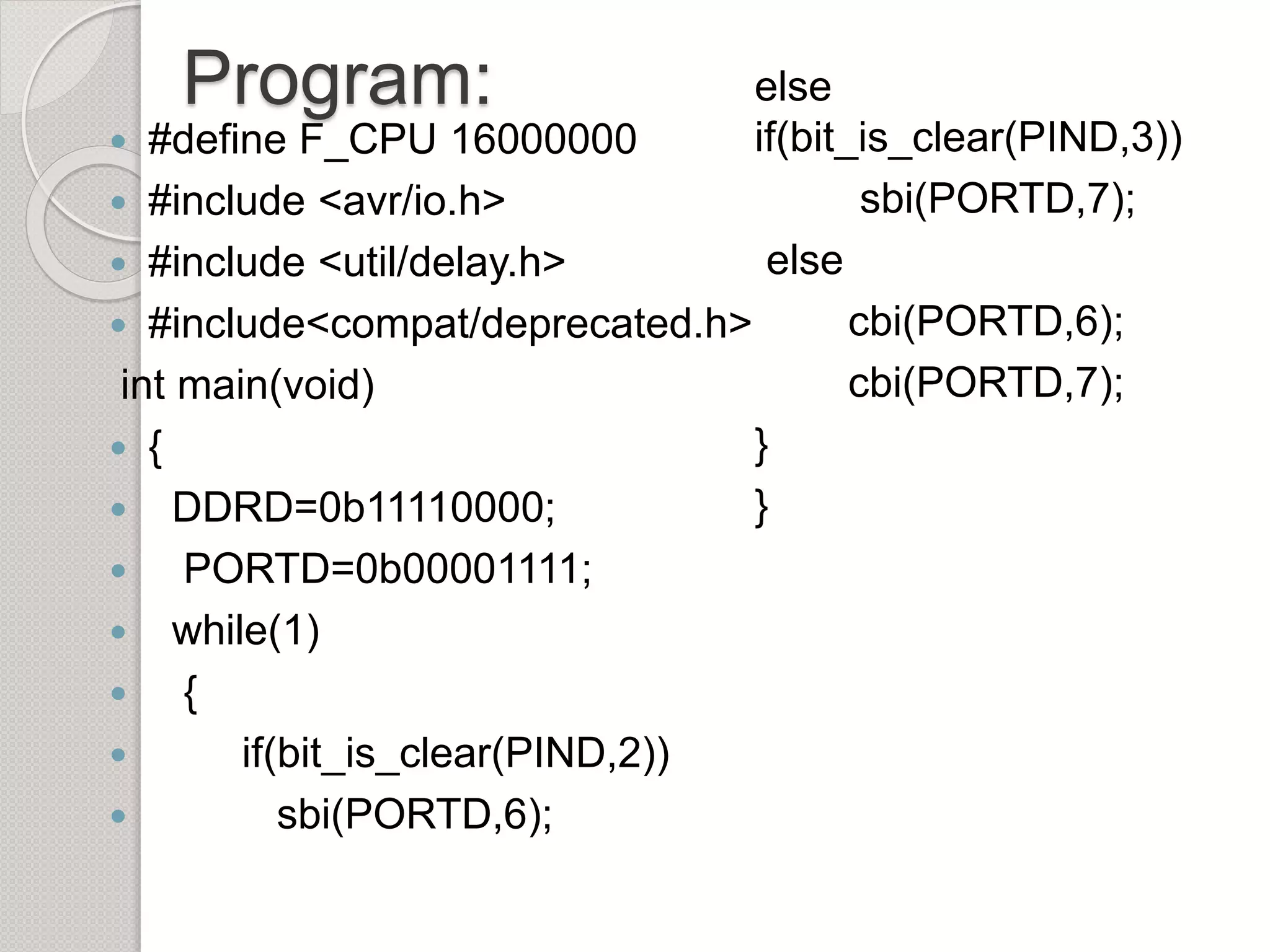
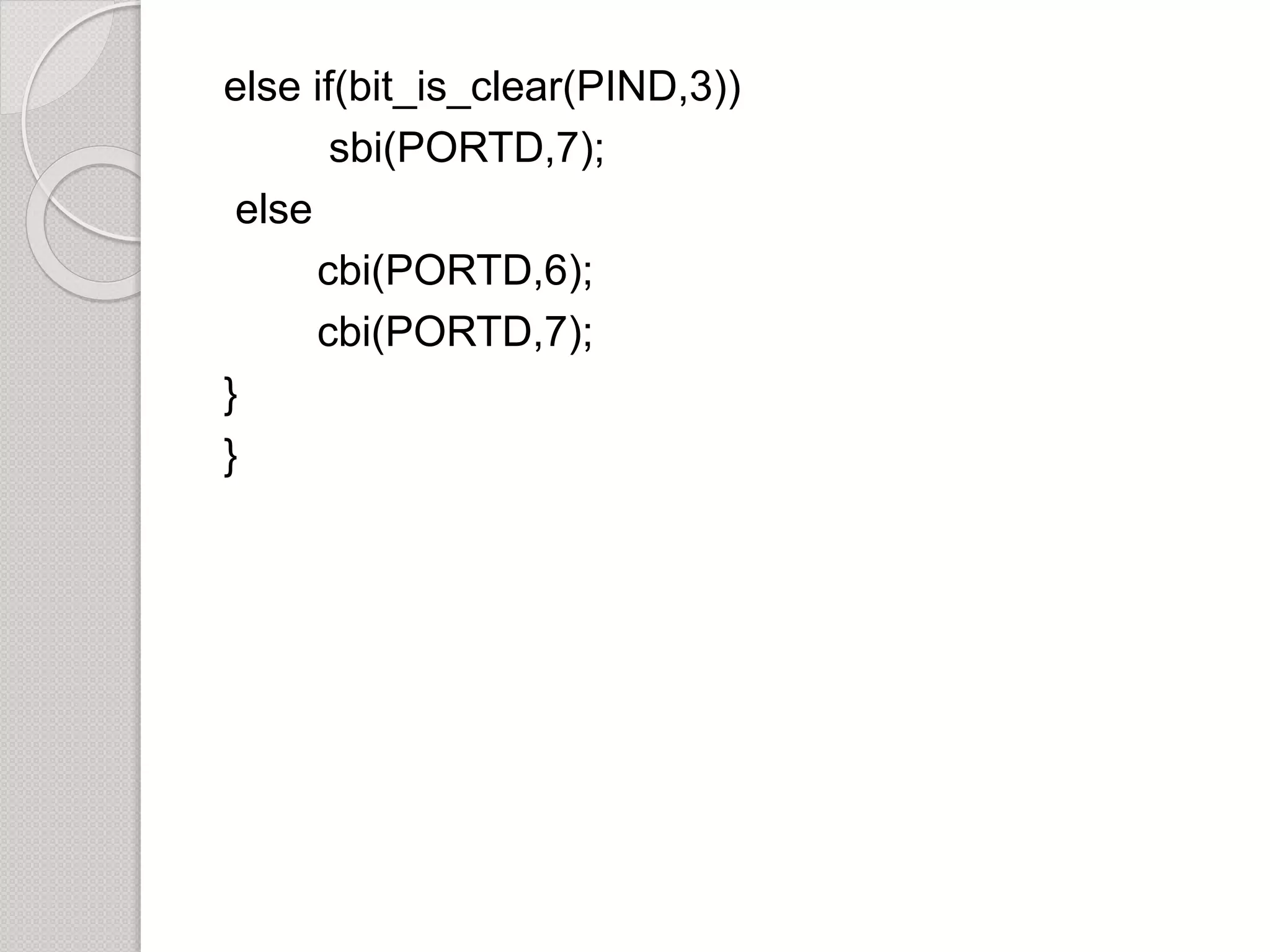
Instructions for programming IR sensors and interfacing switches with examples of using AVR microcontroller code for basic operations.













































































